
某船自动舵偶发失控故障分析与维修
2018-04-26 01:40:02钟多就申传俊
中国修船 2018年1期
钟多就,申传俊
(92236部队,广东 湛江 524002)
自动操舵仪是船舶的一种重要的导航装备,包括航向自动舵和航迹自动舵。通常所说的自动舵,一般指航向自动舵。它通过罗经不断传送来的舰船实际航向与给定航向及舵角大小相比较,以获得相应的控制信号来控制舵机适当转舵,使得船舶自动保持在给定航向上航行。作为船舶航行的关键设备之一,其可靠性运行对保持船舶机动的准确航向、节约燃料延长航行时间、节省人力减轻劳动强度等方面有着重要意义[1]。
国内某船的自动舵在长时间航行过程中,偶发了舵机失控现象,本文详细的介绍该船自动舵偶发失控问题发生后的解决过程,包括故障理论支持、原因分析排查、处理措施及修后验证等,以期作为后续处理同类问题的经验参考。
1 系统组成及特点
船舶操舵系统由控制系统、执行机构两大部分组成。通常所说的自动舵是指控制系统,其由操纵台、接线箱、操纵部位转换箱、舵角反馈机构、电源箱等装置组成。执行机构,又可以叫做驱动装置、伺服装置,主要是用于驱动舵叶转动,一般分为驱动电机型、电磁阀型和电磁液压换向阀型。该船执行机构采用的是电磁阀型,整个操舵系统设计和实现中体现了系统的可靠性,它包含1套控制系统或者2套完全独立的控制系统,配合双机组的选择使用,从而有着很高的可靠性,故障率也比较低[2]。但其控制方法相对落后,在航行过程中对海况、速度、装载等因素适应性较弱。同时,因线路转接多,导致控制系统操作不太方便。万一线路或器件发生故障,定位故障点到排除工作尤为困难且工作量大。
2 故障现象
该船的操舵系统投入使用的前几年,情况基本正常。但进入修理期后,系统故障明显增多,特别是远航时,单机组在“自动”和“随动”操纵方式下多次自动舵偶发失控的故障。具体现象如下。
1)停靠码头时。在无负载情况下,启动I号机组,操纵舵机约1 h,舵机故障。舵机跑左满舵后,接着又往右跑满舵,左右来回满舵跑,控制系统无法控制舵机。停机,重新启动舵机,故障现象消失。继续操作使用约30 min后,故障再次出现。
2)航行时。有负载情况下,启动I号机组,操纵约30 min,舵机出现故障,无法控制。转换机组后,工作一段时间,再转换I号机组,操纵约20 min,故障再现。且发生故障的时间间隔越来越短。
3 故障理论分析
该船控制系统有独立且互为备用的2套系统。每套系统还备有应急操纵,当电气控制无法正常工作时,启动应急操纵,直接向执行机构馈电,驱动舵叶,实施转舵,从而改变船舶航向。操舵系统总框如图1。根据故障现象可以推论,执行机构前级的信号输入,为故障分水岭。
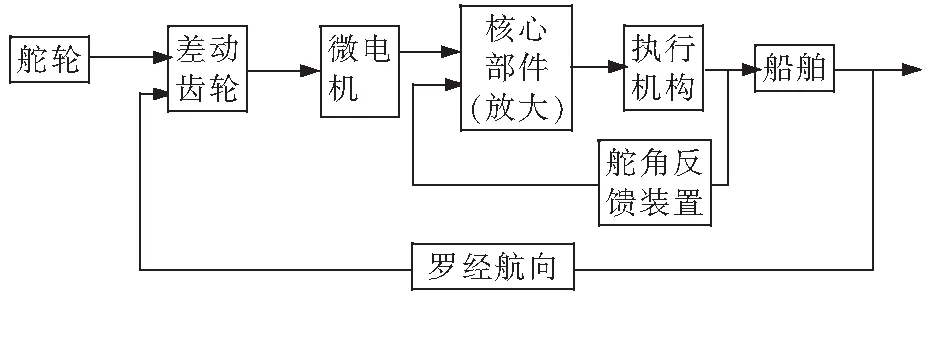
图1 操舵系统总框图
每套控制系统以综合放大器和电源功放板为核心部件,此型自动舵的大部分重要功能都在核心部件内完成。经过核心部件的有“自动”和“随动”两种状态,给定信号由航差信号或者舵轮给出,其信号流程归纳如图2。

图2 “随动”和“自动”方式信号流程
从故障现象分析,首先转至应急操纵时,舵机工作正常,先排除了执行机构出现故障的可能性。其次,因为是互为备用的系统,转至II号通道工作时,舵机工作正常,再排除了II号通道故障的可能性,同时进一步验证了执行机构出故障的可能性。在排除执行机构环节和出现故障的可能性后,着重点应落在控制系统的I号通道上。唯一的原因是因为I号通道回路有故障。因此,重点排查I号通道回路是否存在故障。
4 排查步骤
4.1 简易判断
简易判断,利用“简操”操纵方式直接馈电至电磁阀,不经过其它控制元件,检查舵机工作是否正常,进而缩小故障范围。首先在后舵房的接线箱上转动部位转换开关3S1至“舵机舱”档,在简操纵台上启动I、II号通道,若能够正常操纵舵机,则可以排除执行机构故障的可能;接着将3S1至“驾驶室”档位,转到主操纵台操纵,置操纵方式选择开关S1至“简单”操纵方式,部位转换开关S3至“驾驶室”档,通过操纵通道选择开关S2启动I、II号通道,若舵机工作正常,则排除I、II号通道存在故障的可能。本故障按以上阐述方式进行检查,舵机均能正常工作,并没有出现舵机失控现象。根据原理分析,则故障应该发生在舵角反馈电路、综合放大板模块、电源功放板模块这3个方面,排除舵机执行机构方面故障的可能性。
4.2 进一步缩小故障范围
利用I、II号通道工作相通性,互为备用的特点,进一步缩小故障范围。将II号通道综合放大板A2和电源功放板B2插至I号通道,经S2启动I号通道,发现舵机工作正常;而将I号通道综合放大板A1和电源功放板B1插到II号通道,通过开关S2启动II号通道,舵机出现失控故障现象。由此可以断定故障点发生在综合放大板A1和电源功放板B1中,排除故障出现在舵角反馈电路的可能性。
4.3 逐级信号测量
采取逐级信号测量与电压测量相结合方法,精确定位故障点。用II号通道将舵叶调整为右5°舵后,转换到I号通道进行逐步电压测量。由于舵机左右满舵失控,为了防止舵机在排故过程中损坏执行机构,采取将A1板的1a、2a端的开关信号断开的方法。将两组调试连接线引出综合放大板A1和电源功放板B1。将舵轮向右转动5°,A1板的22b应该有+6 V的电信号,A1-1N7的9、10端输出+6 V,A1-1N2的2端口有信号,则证明在1N2前级所有电路是完好的。此时21b端是经过A1-1N8相敏整流后的,因脱开1a、2a端口,舵叶还停留在右5°,若工作正常的话,反馈必有-6 V的电压输入。实际上,A1-1N12的2端口输入电压+6 V,证明反馈并没有-6 V电压与给定舵角电信号进行对消,因此造成了舵机跑舵,失控。检查20a与19a是否有±15 V电压输入,发现20a端并没有-15 V电压输入,导致1N8芯片无法正常工作,舵角反馈信号无法馈电至A1-1N12的2端口。A1板测量的接口信号示意图如图3。
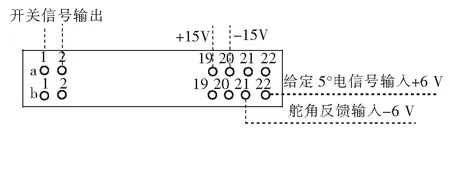
图3 A1板的测量接口示意图
至此,I号通道发生故障的点基本浮出水面,可以确定B1板供电电路出现问题。首先应用应急操纵(“简操”)进行简单的判断,缩小故障范围;接着利用自动操舵仪2套系统互为备用的特点,再进一步缩小故障范围;然后采取逐级电信号测量进行故障定位。排除故障难点在于停机、再启动、使用一段时间后故障再次出现。根据一定的维修保障经验可知,可以肯定的是属于B1板某个器件由于长时间使用出现了一定程度的老化、性能不稳定造成的故障。
5 维修措施
对发生故障的电源功放板B1进行修理。电源功放板的主要功能是输出三路直流电源±15 V和+6 V。±15 V供综合放大器,+6 V为显示、系统电压。
±15 V由三端稳压器7815(N1)、7915(N2)供给,外型图及管脚图如图4所示。7815的1脚为输入端、2脚为输出端、3脚为公共端。7915的1脚为公共端、2脚为输出端、3脚为输入端。三端稳压管7815提供+15 V,7915提供-15 V,其中-15 V电压经过B1板的20a端口到A1板的20a端口。

图4 (7815、7915、338)外型图及管脚图
7815、7915为固定式稳压块,最大输出电流1.5 A,内部设有过流、过热、短路保护电路。+6 V由三端稳压器LM338(N3)供给,LM338(N3)输出电压在1.2~37 V范围内连续可调,最大输出电流5 A,内部设有过流、过热、短路保护电路。本电路电压为+6 V,通过调节R9获得。外型图及管脚图如图4所示,1脚为调整端、2脚为输入端、3脚为输出端。
三端稳压管7915管子随着时间增加的输出电压如图5所示,在刚启动仪器前20~30 min,用万用表测量时有接近-15 V电压输出。30 min后,由于发热,管子内部的过热保护电路老化、性能不稳,从而造成-15 V电压逐步输出降低,直至无输出。更换后进行了大量时间拷机,舵机工作正常。至此,可以确定故障排除。

图5 三端稳压管7915输出电压
6 结束语
此故障可归结为隐显结合的故障。在时间紧急的情况下,排除此类故障需做到以下4点。
1)保持头脑清醒,思路清晰。设备在使用过程出现故障,特别是在航行过程中,情况相当紧急。作为维修保障技术人员,需要保持头脑清醒,沉下心来理顺排除故障的基本思路。
2)充分利用其设计特点。为保证航行安全,对于重要装备而言,通道是互为备用的,充分利用此特点可以快速缩小故障范围。
3)排除故障完毕后,需进行一定时间的拷机。
4)在长期的维修保障过程中,会碰到许多奇特的故障现象,有些为显性,有些为隐性,在努力提高个人维修保障能力水平同时,还需要更多的耐心。
[1] 周永余,许江宁,高敬东.舰船导航系统[M].北京:国防工业出版社,2006.
[2] 冯海林.HD-10型自动舵数字通道的研究[D].武汉:海军工程大学,2003.
猜你喜欢
天然气与石油(2022年5期)2022-11-01 09:03:00
天然气与石油(2022年4期)2022-09-21 07:05:54
中国新闻周刊(2022年16期)2022-05-09 13:08:17
江苏船舶(2021年4期)2021-09-28 08:09:10
舰船科学技术(2021年8期)2021-09-18 08:36:06
趣味(语文)(2020年6期)2020-11-16 01:45:16
舰船电子工程(2020年4期)2020-06-19 06:14:48
中国储运(2015年3期)2015-11-22 08:57:12
中国水运(2015年2期)2015-04-23 15:04:07
决策与信息(2014年16期)2014-12-07 06:40:44
