商用车电子稳定性控制系统测试评价方法研究
2018-04-25 06:22孙勇郭魁元许志光
汽车技术 2018年4期
孙勇 郭魁元 许志光
(中国汽车技术研究中心,天津 300300)
1 前言
商用车电子稳定性控制系统(Electronic Stability Control,ESC)是在制动防抱死系统(Anti-lock Braking System,ABS)、电子制动系统(Electronic Braking System,EBS)基础上发展起来的一种新型主动安全控制系统,在降低商用车道路交通事故和提高车辆稳定性上发挥了重要作用[1~3],因此部分国家地区已开始要求商用车辆强制装配ESC系统。自2017年8月起,美国要求所有重型卡车和大客车必须装配ESC系统,欧盟要求从2014年11月起新生产的所有轻型商用车必须强制配置ESC系统。
目前,市场上面向商用车电子稳定性控制系统的产品主要由主动安全供应商威伯科(WABCO)、克诺尔(KNORR)公司推出,而国内具备自主知识产权的商用车ESC产品还没有装配在车辆上[4,5]。在ESC标准法规方面,欧盟ECE R13和美国NHTSA FMVSS136法规规定了商用车ESC系统的性能以及相关测试方法等,但是两者在车型适用范围、测试方法、性能评价指标等方面存在较大差异,商用车ESC系统的测试还没有形成统一有效的评价方法。
本文分析了ECER13法规和FMVSS 136法规针对ESC测试评价的差异,探讨了ISO商用车操纵稳定性评价方法在ESC功能测试评价上的适用性,并依据ECE R13法规,通过实车道路试验测试了ESC系统的方向稳定性控制功能,为制定统一有效的商用车ESC系统测试方法、评价指标提供支持。
2 商用车ESC控制原理
相关研究表明,商用车因质心较高使其侧倾稳定性较低而易发生侧翻失稳[6]。基于纵向力和侧向力耦合关系以及轮胎侧偏特性理论[7],当商用车轮胎特性处于非线性区时,若前轴侧向力先达到附着极限(饱和),则车辆产生侧滑(Plow out);若后轴侧向力先达到附着极限(饱和),则车辆出现甩尾(Spin out),进而导致车辆横摆失稳。常见的失稳状态如图1所示。
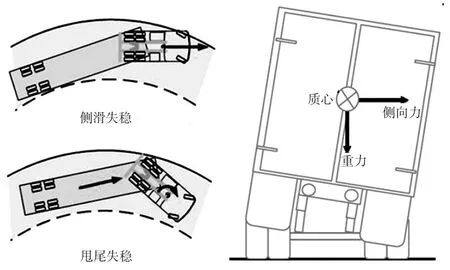
图1 车辆失稳状态示意
针对不同的失稳状态,商用车ESC系统通常具有防侧翻稳定性控制(Roll Stability Control,RSC)和方向稳定性控制(Directional Stability Control,DSC)两个功能。RSC系统主要应用于高附着系数路面,当车辆侧向加速度达到临界点时,RSC系统通过限制或降低发动机转矩输出,或对相应车轮进行主动制动,使车辆减速达到稳定状态;当横摆角速度或质心侧偏角超出稳定性区域边界时,DSC系统通过限制或降低发动机转矩输出,或对相应车轮进行主动制动[9,10]来保持车辆的稳定状态。
3 商用车ESC测试评价标准和方法
3.1 法规ECE R13的ESC测试评价
欧盟在商用车制动法规ECER13《关于M、N、O类机动车制动的统一规定》附件21中对装有ESC系统的车辆进行了特殊要求。
3.1.1 法规ECER13适用车型范围
法规ECER13适用车型范围如表1所示。

表1 法规ECER13适用车型范围
3.1.2 试验工况
法规ECER13对商用车ESC系统的功能要求为:对于方向控制,应能自动控制同一车轴或同一轴组上的左右车轮速度,此功能通过车辆实际运行状况与车辆驾驶意图的比较评价(对于挂车,通过挂车实际运行状况与牵引车状态意图下的车辆行为进行比较评价)进行选择制动来实现;对于侧翻控制,应能自动控制同一车轴或同一轴组上至少两个车轮速度,此功能通过对车辆可能导致侧翻的实际运行状况的评价进行选择制动或自动控制制动来实现。基于上述功能要求,法规ECER13中给出了验证ESC功能的试验工况,如表2所列。

表2 法规ECER13验证ESC功能的试验工况
3.1.3 测试方法及评价指标
法规ECER13针对方向控制和侧翻控制分别规定了相应的测试工况,但并未给出每个试验工况的具体测试方法,具体测试方法由认证机构与厂家协调决定。法规ECER13提及当所选工况并未引起方向稳定性丧失或侧翻发生时,车辆生产厂家应与认证机构协商将其作为适当的备选工况参与验证试验。
法规ECER13附录中规定,可以利用仿真方法对M、N、O类动力传动车辆及挂车的方向控制和侧翻控制的有效性进行验证,以减少试验样车的实际测试数量,降低相应的测试成本。这种测试评价方法需要通过仿真测试与实车测试的高精度验证,同时仿真工具需要通过相关认证机构的授权认可。
在统一的商用车ESC测试方法确定前,具体的认证评价测试由相关的认证机构和生产厂商进行一致确认。目前评价指标规定如下:在相应的试验工况下,车辆发出降低车速的制动信号或发动机限制(或降低)输出转矩的信号,并且车辆能够保持相对稳定状态,即可认为ESC性能满足ECER13标准要求。
3.2 FMVSSNo.136法规ESC测试评价
美国国家公路交通安全管理局(NHTSA)推出了FMVSSNo.136《重型车辆电子稳定控制系统》法规,此法规针对侧翻稳定性控制功能给出了具体的测试方法和评价指标,但对于方向稳定性的控制功能并未给出测试方法和评价指标。
3.2.1 FMVSSNo.136法规适用车型范围
FMVSSNo.136法规适用车型范围如表3所列。
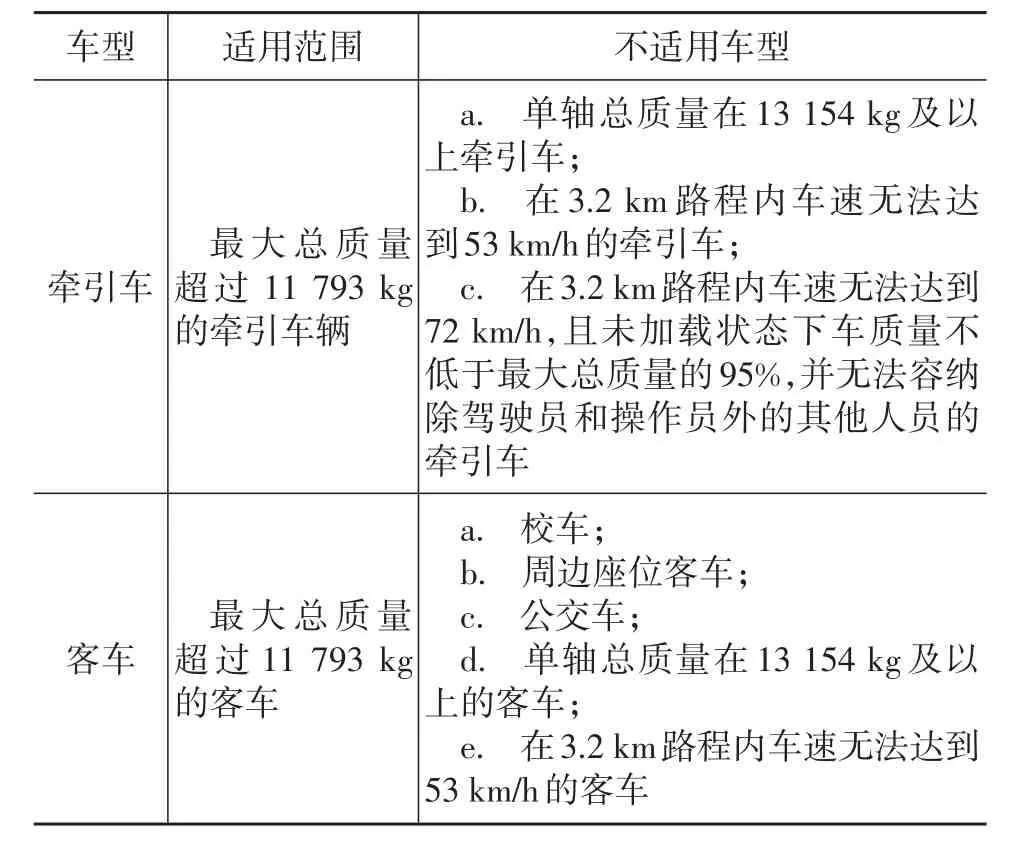
表3 FMVSSNo.136法规适用车型范围
3.2.2 试验工况及测试方法
3.2.2.1 试验工况
法规FMVSSNo.136采用J-Turn试验作为测试ESC防侧翻控制的试验工况,J-Turn是一个路径跟随工况(path followingmaneuver),车辆先以一定速度直线行驶,再切线进入定半径圆周曲线路径,转向盘转角由驾驶员根据对固定路径的保持跟随而进行动态调节或修正,J-Turn试验路径如图2所示。

图2 J-Turn试验路径
3.2.2.2 测试方法
测试时,驾驶员驾驶车辆以某一速度进入试验路径,保持车速并操作转向盘跟随固定路径。车辆进入试验路径的初速度为32 km/h,以1.6 km/h的幅度逐渐增加车速并重复进行试验,直至车辆在某一速度下ESC行车制动功能被激活,在此期间驾驶员不得有行车制动或发动机排气制动等操作,此时的速度称为初始参考速度Vref-1。
对于气压制动系统车辆,ESC行车制动功能被激活时,制动系统气压应至少达到34 kPa,并维持时间不小于0.5 s;对于液压制动系统车辆,ESC行车制动功能被激活时,制动系统液压应至少达到172 kPa,并维持时间不少于0.5 s。
当在某一初始参考速度Vref-1下进行顺时针和逆时针试验时,每个方向的4次试验中不低于2次试验可以激活ESC功能,则认定该速度为试验参考速度Vref-2,否则以1.6 km/h幅度增加初始参考速度并重复试验。
驾驶员以试验参考速度Vref-2进入试验路径时,立即将油门踏板踩到底,操作转向盘对固定路径的保持跟随,ESC被激活后将对发动机降转矩,测试发动机转矩相对驾驶员需求转矩的降低幅值,然后将车辆进入试验路径的速度提高到Vtest,Vtest应满足Vtest=1.3Vref-2,且Vtest≥48 km/h。
通过初始位置后,驾驶员立即将油门踏板踩到底,操作转向盘保持对固定路径的跟随,ESC被激活后采取行车制动降低车速,测试ESC的防侧翻拉制能力。当完成一个系列的上述试验(包括顺时针和逆时针试验)时,车辆的ESC功能应被激活并满足相应性能要求及评价指标。
3.2.3 性能要求及评价指标
FMVSSNo.136法规规定ESC功能应满足以下4个方面的性能要求及评价指标。
3.2.3.1 系统响应特性
在连续8次测试(顺时针4次,逆时针4次)中,应至少有6次(单方向不少于2次)测试时车轮保持在规定的初始位置与结束位置的120°范围的路径内。车辆进入试验路径的试验速度Vtest应不小于48 km/h。
3.2.3.2 发动机降转矩能力
车辆通过测试路径初始位置后1.5 s开始到测试路径结束这段时间内,ESC系统应能至少持续工作0.5 s,以保证减少不低于10%的驾驶员需求发动机转矩。
3.2.3.3 侧翻稳定控制性能
法规要求测试满足以下性能要求:
a.车辆通过初始位置点后的第3.0 s时测得的车速不应超过47 km/h;
b.车辆通过初始位置点后的第4.0 s时测得的车速不应超过45 km/h;
3.2.3.4 ESC故障检测能力
每辆车必须在驾驶员易于观察的位置配备指示器,当ESC出现故障时该指示器应处于激活状态。
3.3 基于ISO商用车标准的ESC测试评价
法规ECER13中所列出的ESC功能测试工况是基于ISO商用车标准设计的。在ISO商用车标准中,与商用车操纵稳定性相关的标准主要有ISO11026:2010、ISO14792:2011、ISO14793:2011和 ISO3888—1:1999等,为此,基于以上标准测试工况的评价方法进行分析[11~14]。
a.ISO11026:2010《重型商用车和公共汽车侧倾稳定性闭合曲线试验方法》是为了确定侧倾稳定性的控制效果。车辆以恒定纵向速度沿曲率不断增加的闭合曲线路径行驶,闭合曲线路径通过侧向加速度的变化率和纵向行驶车速来确定,同时路径曲率应能保证车辆侧向加速度超出稳态侧倾阀值的50%。
b.ISO14792:2011《重型商用车和公共汽车稳态回转试验方法》主要是测试车辆左转向与右转向时的稳态转向特性,试验方法分为定圆周(固定转向盘转角)连续加速试验和定车速连续增加转向盘转角试验。
c.ISO14793:2011《重型商用车和公共汽车侧向瞬时响应试验方法》的测试目标是确定线性区行为和非线性区行为的车辆瞬时响应特性,其中线性区特性基于频域内随机输入、脉冲输入、连续正弦输入试验进行测试;非线性区特性基于时域内阶跃输入、单周期的正弦输入试验进行测试。
d.ISO3888—1:1999《车道急剧改变操纵用试验车道:双移线变道》作为一项适用轻型汽车的闭环测试方法,经适当调整后可用于商用车辆以及客车的测试评价,其主要用于测试车辆的侧翻稳定性和方向控制稳定性。
上述基本试验方法通过对功能适当调整后可用于商用车ESC的方向稳定性和侧翻稳定性的测试评价,测试工况及评价指标[15,16]如表4所示。

表4 基于ISO标准的ESC功能测试工况及评价指标
4 ESC实车道路测试
为测试我国商用车ESC的稳定性控制功能是否满足ECER13的法规要求,依据ECER13的试验工况(高附着到低附着路面变道试验),选用国产某牵引列车进行ESC实车道路测试。因ECE R13法规中并未对车辆测试时的载荷状态作出规定,一般认为在法规认证时选择任何一种载荷状态都可以,故该测试选择在车辆空载状态下进行,所选牵引列车样车主要技术参数如表5所列。

表5 国产某牵引列车样车主要技术参数
4.1 ESC防侧翻支架
重型商用车的ESC功能验证试验危险性较高,为此设计了一种可适用于多种车型的防侧翻支架[17],如图3所示。

图3 汽车试验用防侧翻支架
4.2 ESC方向控制功能验证
ESC方向控制功能验证选用高附着路面到低附着路面的变道试验路径进行,该工况模拟在一定速度下因躲避障碍而引起的方向失稳,要求在一定长度L范围内完成变道操作。在整个试验过程中,驾驶员尽量保持油门踏板的位置不变,完成变道后,驾驶员可根据车辆实际运行状况施加转向盘修正动作,但必须保持车辆在相应宽度B的车道范围内,试验路径如图4所示。图4中,高附着路面的路面附着系数μhigh≥0.7,低附着路面的路面附着系数μlow≤0.3,B≥4m,L≈车速/3.6(估计值)。在黑龙江北安冬季汽车测试场进行了ESC方向控制功能道路试验,试验选用了高附着沥青路面(μ≈0.8)到低附着压实冰雪路面((μ≈0.2)的变道路径。

图4 高附着路面到低附着路面变道试验路径
图5为ESC方向控制功能测试结果。由图5可看出,在由高附着路面向低附着路面变道过程中,列车前半部分先进入低附着路面,列车后半部分位于高附着路面,由于列车以50 km/h的较高速度进行转向变道,列车前、后轴的轮胎所受侧向力不同,出现横摆方向失稳,此时ESC系统立刻启动对牵引车以及挂车相应车轮施加主动制动,保证了列车稳定,此时相应车轮的制动气压最高达0.1MPa。
在试验中,列车在低附着路面上出现明显的不足转向,这是因为驾驶员紧急操纵转向盘以维持列车在低附着路面上沿道路方向行驶时,由于横摆角速度滞后于驾驶员对转向盘的操纵,这种滞后特性使车辆在转向过程中产生较大的横摆力矩,作用一段时间后产生很大的质心侧偏角,从而引发失稳[18]。此时ESC系统识别到潜在危险后立刻启动对相应车轮以及挂车车轮的主动制动,一方面可以降低列车车速,另外一方面不同车轮上的制动力可形成对不足转向的抑制力矩,此时牵引车的车轮制动气压最高达0.35MPa,挂车车轮制动气压达到0.15 MPa,以此来保证牵引列车的方向稳定性。
在此试验工况中,车辆的车速因主动制动而逐渐降低,不稳定状态得到了控制,车辆保持相对稳定状态,ESC性能满足法规ECER13要求。

图5 ESC方向控制功能测试结果
5 商用车ESC的测试评价发展趋势
美国NHTSA推出的适用于评价商用车ESC系统的FMVSS 136法规只规定了防侧翻稳定控制性能的测试方法以及评价指标,其选用的J-turn工况可减轻企业的检测成本和避免场地条件的限制,并且可较好地体现车辆的侧翻稳定性状态,相对容易操作,但并未列出方向稳定性的测试评价方法以及评价指标。
欧洲ECER13法规虽然对ESC系统评价规定了相关的试验工况,但并未给出具体的测试方法以及评价指标;ISO商用车操纵稳定性标准可以根据具体测试情况适当调整即可用于ESC系统的评价,但与ECER13法规存在类似问题,详细的测试方法以及具体的评价指标需要继续研究。同时ECER13法规支持采用仿真认证的方法对ESC系统进行评价,可降低研发测试、车型匹配以及型式认证的成本,模型平台和仿真工具、环境的搭建以及有效性的验证需进一步深入研究,国外研究机构已逐渐开展相关工作[19,20]。
商用车ESC控制技术在我国发展刚刚起步,目前还未有自主研发且成熟、市场化产品推出,但是万安科技、集瑞重工、清华大学已经开始着手开发商用车ESC系统。全国汽车标准化技术委员会已经启动商用车电子稳定控制系统性能要求和试验方法的标准立项研究工作。
基于我国特殊复杂的交通运输、道路环境等因素,且国内商用车ESC的测试评价处于起步研究阶段,可优先考虑参考ECER13的测试评价方法,随着研究的推进以及技术发展,定量化的评价指标是未来商用车测试评价的必然要求。
从各国ESC标准发展来看,商用车ESC系统的试验方法以及评价指标在不同的法规中有不同的规定,商用车ESC测试评价还未有效统一,研究不同法规不同试验工况的异同,并提出详细具体的测试规程以及评价指标是需要重点关注的问题。
[1]Detlev Neuhaus,Jens Willms.Vehicle Dynamics —Continuous Improvements in Vehicle Safety from ABS to Electronic Stability Control.SAEPaper No.2005-26-065.
[2]John Woodrooffe,Daniel Blower,Paul E.Green.Safety Performance and Benefits of Heavy Truck Stability Control:Providing Insight into Compliance Evaluation.SAE Paper No.2012-01-1906.
[3]Federal motor vehicle safety standard:FMVSS 136,Electronic Stability Control Systems for Heavy Vehicles,Preliminary Regulatory ImpactAnalysis(PRIA),May 2012.
[4]刘兆勇,商用车电子稳定性控制系统初步研究:[学位论文].上海:同济大学,2007.
[5]罗文发,吴光强,郑松林.商用车电子稳定性控制系统的标准发展及关键技术[J].汽车技术,2012(4):6~12.
[6]Chris Winkler,UMTRI Research Review.University of Michigan Transportation Research Institute,2000,31(4):1~20.
[7]Gillespie TD著,赵六奇,金达锋,译.车辆动力学基础.北京:清华大学出版社,2006.
[8]彭涛.半挂汽车列车非线性稳定性控制研究:[学位论文].长春:吉林大学,2012.
[9]Economic commission for Europe regulation:ECE R13 Rev.8,Uniform provisions concerning the approval of vehicles of categories M,N and O with regard to braking,2014.
[10]Federal motor vehicle safety standard:FMVSS 136,Electronic Stability Control Systems for Heavy Vehicles,FinalRule,DocketNo.NHTSA-2015-0056.
[11]ISO 11026:2010.Heavy commercial vehicles and buses—Testmethod for rollstability—Closing-curve test.
[12]ISO 14792:2011.Road vehicles—Heavy commercial vehiclesand buses—Steady-state circular tests.
[13]ISO 14793:2011.Road vehicles—Heavy commercial vehicles and buses—Lateral transient response test methods.
[14]ISO 3888-1:1999.Road vehicles—Passenger cars— Test track for a severe lane changemaneuver—Part 1:Double lane change.
[15]朱红岩,游国平.商用车电子稳定控制系统测试技术[J].客车技术与研究,2012(6):48~52.
[16]DAIMLER, Test Procedures for ESP evaluation,Sindelfingen,2014.
[17]高明秋,郭魁元,许志光,徐军辉.汽车试验用防侧翻支架.中国专利,201120490407.9.2012-08-08.
[18]丁海涛,轮胎附着极限下汽车稳定性控制的仿真研究:[学1位论文].长春:吉林大学,2003.
[19]Jiri Horak,Stefan Pfitzer,Michael Kecheisen etc..Simulation-Based Homologation of Truck ESC Systems,21st Aachen Colloquium Automobile and Engine Technology 2012,p.1621—1633.
[20]KarlMichael Hahn,Henning Holzmann,Florian Weyer etc.Simulation-based Certification of ESC Systems for Passenger Vehicles in Europe.SAE 2012-01-0235.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年17期)2022-09-16
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年6期)2021-06-09
理财·市场版(2020年7期)2020-08-06
理财·市场版(2019年10期)2019-09-10
电子制作(2019年15期)2019-08-27
汽车与安全(2019年3期)2019-06-21
汽车与安全(2019年12期)2019-05-14
学生天地·小学中高年级(2009年5期)2009-06-29