
基于3-RPS 并联机构的视觉设备安装 平台建模与仿真
2018-04-24 05:54:54王祥王杰高磊
新型工业化 2018年12期
王祥,王杰,高磊
(西安工程大学 机电工程学院,陕西 西安 710048)
0 引言
机器人视觉在纺织、检测以及工业等领域得到了广泛的应用[1-3]。目前,视觉设备的安装平台分为固定平台和移动平台两种,具有应用局限性,移动平台一部分以电机驱动,可以实现左右摇摆和上下俯仰2 自由度的转动,如监控探头[4-5];另一部分,在“eye-in-hand”视觉系统中,视觉设备跟随机械臂末端运动,实现空间运动[5-8],稳定性不好。并联机构具有刚度重量比大、稳定性强和环境适应性强等优点,而且响应速度快、技术附加值高、易于重构并且制造成本低[9],因此,并联机构平台得到了广泛地关注。文献[10-12]以3-RRR 并联机构为平台设计了球面并联机构仿生眼。3-RRR 并联机构能实现绕三个轴的转动[13],但在工业生产中很少应用。文献[14]开发了基于3-RPS 并联工作台的新型3D 打印机构,在满足3D 打印技术的基本成型条件的同时,还能够完全按照纤维取向成型。文献[15]研制了一台基于3-RPS 并联机构平台的灭火喷枪样机,实现了远程无人灭火。文献[16]将 3-RPS并联机构应用于先进机床。文献[17]提出了一种3-RPS 机器人和虚拟现实技术结合的全新滑雪模拟器方案,可以模拟滑雪者俯仰、偏转,速降 3个维度的运动。
3-RPS 并联机构是在Stewart 六自由度并联机器人的基础上发展而来的[18]。通过改变三个移动副的位移使动平台可以实现前后移动、左右摇摆和上下俯仰3 个自由度[19]。将视觉设备安装于该平台上,能够实现在机器人本体位姿或目标本体位姿不变的情况下,视觉设备能够到达满足拍摄要求的角度和位置,从而获取高质量的图像或视频,为后续的图像处理提供方便。本文对视觉设备安装平台进行建模,并基于MATLAB 对其工作空间进行分析,该平台的工作空间大,运行稳定性好,具有较高的实用价值。
1 视觉设备安装平台的建模分析
1.1 视觉设备安装平台的自由度计算
自由度的表达和计算是机构研究很重要的一部分,只有对机构自由度正确的分析、计算与表达,才能得到相应的机构,并且能够实现真实的运动。

其中,F 为机构的自由度,n 为构件数,g 为运动副数,fi为运动副的自由度,d 为机构公共约束因子,d= 6 - λ,λ 为机构公共约束数,ν 为并联冗余约束因子。3-RPS 型并联机构平台为3 自由度的空间机构。
1.2 视觉设备安装平台的建模
在分析机构的工作空间时需要建立机构模型,各结构设计合理才能完成仿真[20]。利用SolidWorks 对视觉设备安装平台进行建模,如图1 所示。视觉设备的光轴线交于动平台平面的形心点,视觉设备底面与动平台平面贴合。机构的主要参数如表1 所示。

表1 3-RPS 并联机构的主要参数 Table 1 Main parameters of 3-RPS parallel mechanism

图1 视觉设备安装平台模型 Fig.1 Visual equipment installation platform model
2 平台机构运动学分析
2.1 平台机构描述

图2 视觉设备安装平台简图 Fig.2 Visual equipment installation platform sketch
定坐标系位于静平台的几何中心,动坐标系位于动平台的几何中心,初始位置时,动平台平行于静平台,当动平台绕着动坐标旋转时,动平台的位姿发生改变,为了确定动平台在运动中相对于定平台的位置,根据3-RPS 并联机构的运动特点,采用欧拉角来描述。
2.2 视觉设备安装平台的运动学正解
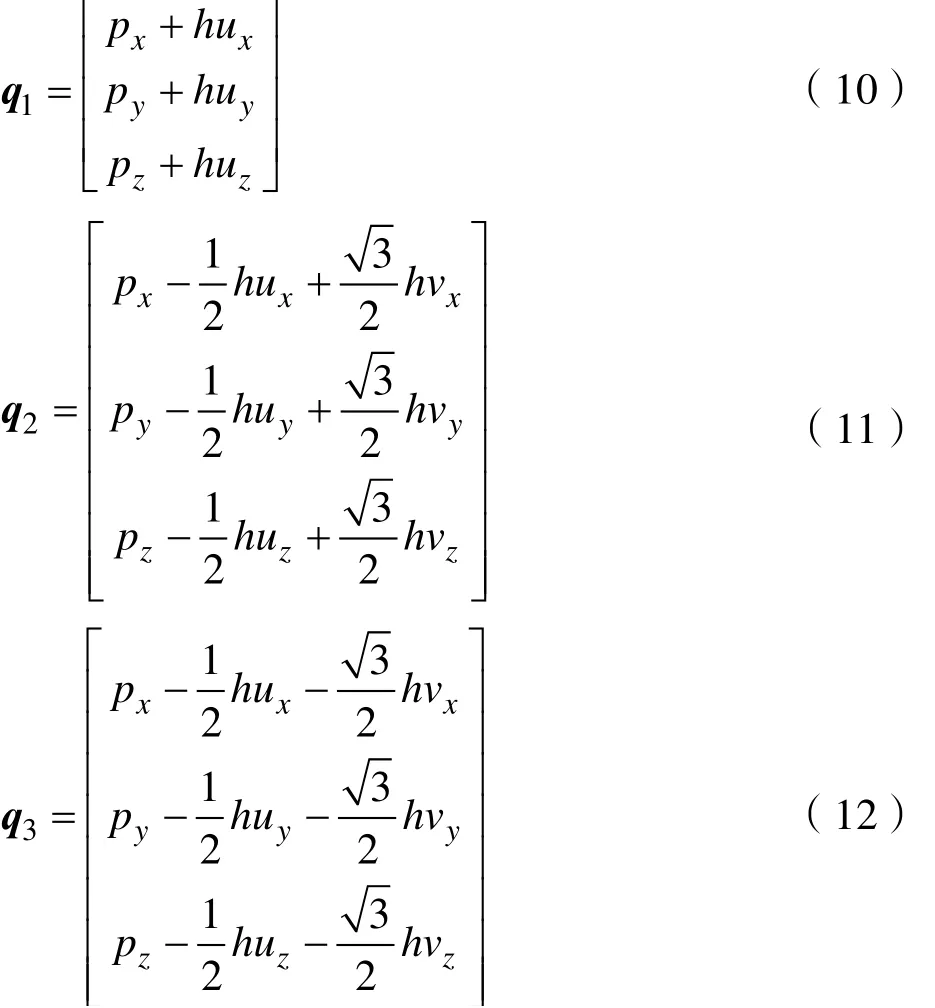
如图2 所示,设 φi( i = 1,2,3)为支杆 AiBi和基座OAi的夹角。例如,在固定坐标系下球关节 Bi的位置向量可以表示为:


将式(2)~(4)代入式(5)可得:


球关节iB 对于定平台的位置向量2q 也可以写成:

因此,
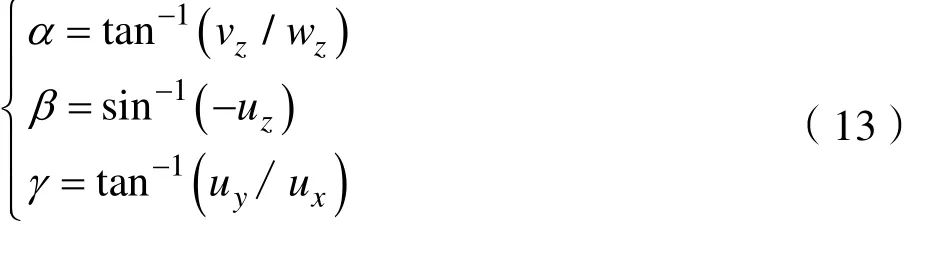
通过式(9)~(12)可以求得Z-Y-X 型欧拉角,如下式:
2.3 视觉设备安装平台的运动学逆解
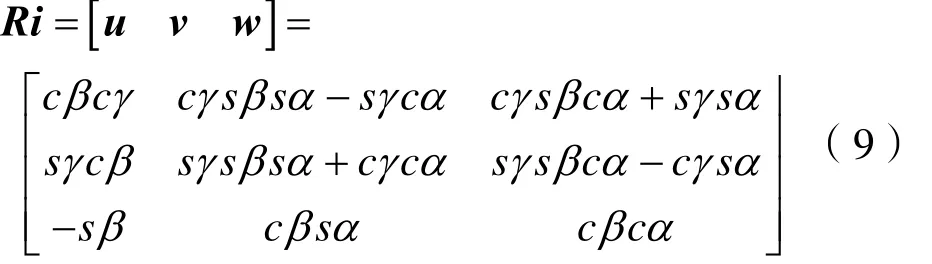
如图2 所示,动坐标相对与定坐标的旋转变换矩阵为:
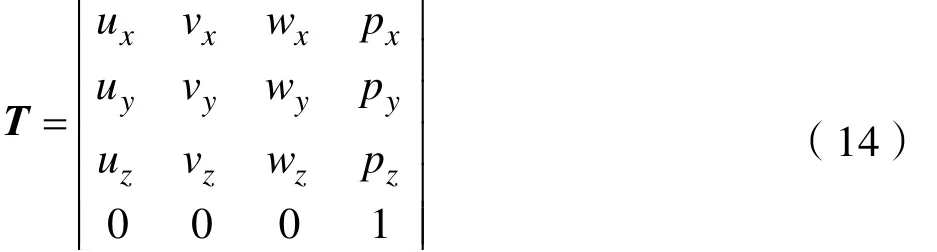
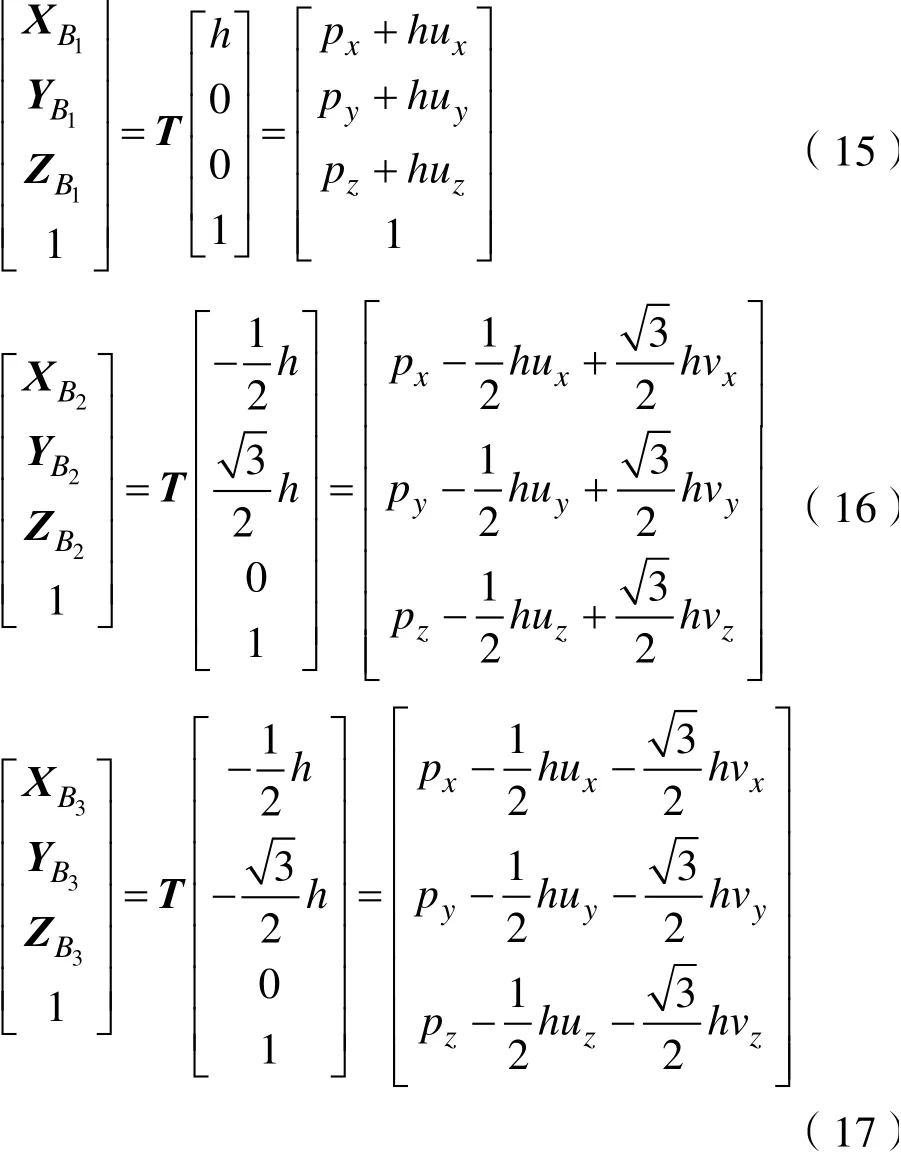
其中,点P 为上平台形心。因此,在定坐标系O-XYZ 中, Bi( i= 1,2,3)的坐标为: 机构各部分普遍存在约束条件[22]。当3-RPS 并联机构基面内转动副的轴线对中心点O 呈切向分布时,机构 3 个分支转动副的这种位置布置限制了动平台3 个球铰的运动。 B1, B2,B3三点必须在 y=0,y=x,y=-x3 个垂直平面内运动,如图3 为三个约束平面。
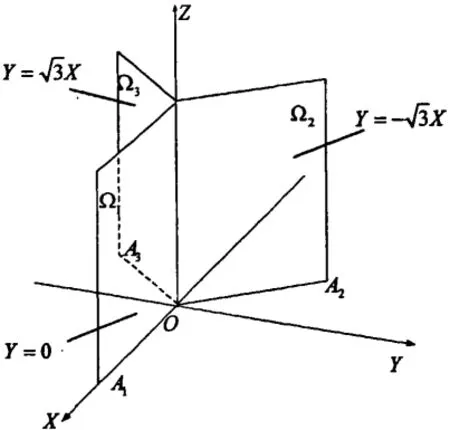
图3 约束平面 Fig.3 Constrained plane
因此,可得:

设动平台相对于定平台的空间Z-Y-X 欧拉角表示为(γβα),则转换矩阵为:

求得:

这样矩阵T 中就只含有α 、β 和 pz3 个变量。动平台铰链点 Bi( i= 1,2,3)相对于静坐标系O-XYZ的表达式为:


式(22)是关于α 、β 和zp 的表达式,只要给定机构动平台的姿态参数α 、β 和动平台P 点的高度zp 就可以计算出连杆的长度。经过平台机构的运动学分析,可以明确得到机构各关节量与平台位姿之间的对应关系[21,22]。
3 视觉设备安装平台的工作空间分析
3.1 视觉设备安装平台的工作空间分析
将动平台的形心定为参考点,其可能达到的某一空间定为搜索空间。首先将动平台的工作空间用平行于p-xyz 面的平面分割成若干个厚度为 zΔ 的子空间,在给定动平台形心在定平台坐标系Z 方向的坐标值的情况下,使动平台进行2 次转动,然后在物理模型中找到形心的坐标,视为一个边界点。将收集到的所有边界点的坐标,用MATLAB 软件进行编程,得到整个动平台的工作空间,如图4 所示。
3.2 支杆伸长量与欧拉角之间的关系
图4 视觉设备安装平台的工作空间 Fig.4 The workspace of visual equipment installation platform
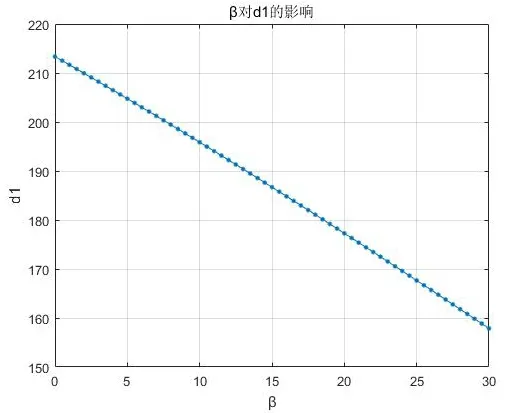
图5 杆长 1d 与β 角的关系 Fig.5 Relationship between 1d and β
影响机构姿态的因素有很多,欧拉角对机构姿 态是主要的影响因素。设欧拉角β 的范围为0 ~30° °, 0α = °。支杆的伸长量与欧拉角之间的关系,如图5 所示。
图中可以看出随着欧拉角β 的增加,支杆1d 的长度基本趋于均匀减小;在 0β = °时,即动平台与静平台处于平行状态时,支杆的长度最长,这符合实际情况。
3.3 机构的输入输出关系
在已知了3-RPS 并联机构的工作空间的基础上,研究机构的输入输出关系是必要的。机构的输入输出关系可以间接的反映机构的工作性能与工作效率。本文从三个方面研究了机构的输入输出关系。
(1) 若动平台中心只沿着X 轴运动,则 py= 0,欧拉角的关系如图6 所示,机构在只沿X 轴运动时,其运动轨迹是关于Y 轴对称的。由图可以看出,当输入欧拉角α=0°, β= 0°时,输出的γ= 0°;
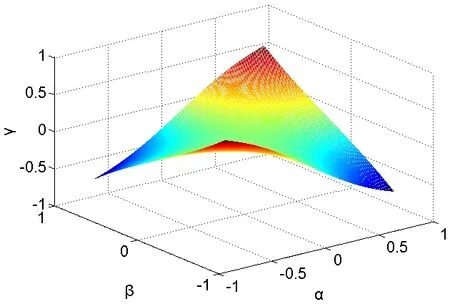
图6 py= 0时欧拉角关系图 Fig.6 Euler angle diagram when p y= 0
(2)若动平台只沿着Y 轴运动,则 px= 0,欧拉角的关系如图7 所示,机构在只沿Y 轴运动时,其运动轨迹是关于X 轴对称的。由图可以看出,当输入欧拉角α=0°, β= 0°时,输出的γ= 0°。
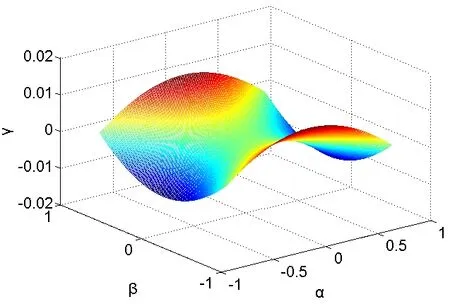
图7 px= 0时欧拉角关系图 Fig.7 Euler angle diagram when p x= 0
(3)若动平台中心维持在 Z 轴上,则px= 0, py= 0,欧拉角的关系如图8 所示。
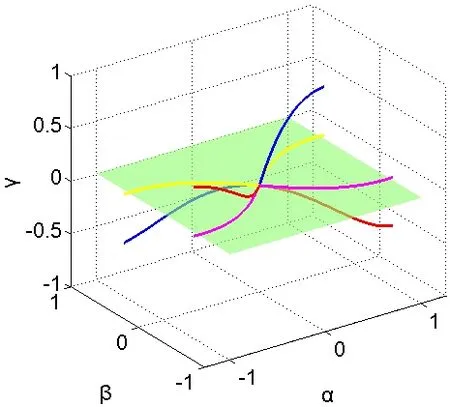
图8 px=0, py= 0时欧拉角关系图 Fig.8 Euler angle diagram when px=0, py= 0
由图9 可知,当动平台只沿着Z 轴运动时,则欧拉角的关系呈两条曲线分布,分布在 γ = 0°的平面两侧。当α=0 °,β= 0°时,动平台与静平台处于平行状态。当输入α=10°,则输出β= 10° 或β = 10° ; 当 输 入 β = 10°时, 输 出α= 10° 或α=-10°。欧拉角β 与γ 的关系与欧拉角α 与β 的关系类似,这也是符合实际情况的。
中心点P 的位姿可用向量w 表示,其中w 为:

则可求得向量的末端轨迹,如图9 所示。

图9 形心只沿Z 轴运动的轨迹图 Fig.9 Trajectory map of the centroid only along the Z axis
4 结语
本文针对目前串联机构的视觉设备安装平台工作空间受限,运行稳定性差等问题,基于3-RPS并联机构设计了一种视觉设备安装平台,基于MATLAB 对该平台进行了分析。经过对相关参数之间关系的分析,确定了并联机构的工作空间,该平台的工作空间大,视觉设备可以实现前后移动、左右摇摆和上下俯仰,且运行稳定性好。后期,需要搭建实验平台,并进行视觉设备安装平台的控制实验,对系统参数进行优化,促进该平台的实际应用。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
科技视界(2017年6期)2017-07-01 08:33:34
软件导刊(2016年11期)2016-12-22 21:37:36
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
舰船科学技术(2014年3期)2014-08-26 02:48:06
