排队检测在邢衡高速(衡水段)的应用
2018-04-24 06:12
中国公路 2018年7期
石家庄泛安科技开发有限公司 狄亚璞
河北省邢衡高速公路分为邢台段和衡水段,其中衡水段环绕衡水市连接大广高速公路,全长72.2公里,双向四车道设计,促成了衡水绕城高速公路的形成。本文结合高速公路全程信息化综合管理平台系统在邢衡高速公路(衡水段)的实施,介绍排队检测功能在该项目中的应用。
排队检测简介
现有的交通控制手段大多利用微波车检器、卡口、红外激光雷达或高频雷达等方式来实现对车辆的检测功能,而邢衡高速公路实现了基于视频分析的车辆排队检测功能。与既有方法相比,基于视频分析的智能交通监控系统具有以下优点:监控范围大、投资少、费用低、摄像头便于安装调试、获得交通信息多。对于高速公路车辆排队长度的检测,可通过车辆排队长度和频率信息,调整高速公路收费入口数量以及对路段事故做出及时反应,以减少拥堵。排队检测主要分为两步,即车辆有无排队情况的判断和队列长度计算。
日间场景下的车辆排队检测
在日间光线充足的情况下,通过摄像头,路段上车辆的外部轮廓信息和运动信息比较容易获得。对于摄像头获取的图像,有多种方法可进行车辆的排队检测,在这里我们采用移动检测窗法对车辆进行排队检测,其中主要包括形态学边缘车辆存在检测以及帧间差分法运动检测两部分。
一般来说常用对车辆运动检测的办法有以下三种:(1)利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”的光流法,即研究图像灰度在时间上的变化与景象中物体结构及其运动的关系。光流计算方法大致可分为三类:基于匹配的方法、频域的方法和梯度的方法。光流法通常存在计算复杂度高以及计算精度欠缺的问题。(2)基于背景的差分法是采用图像序列中的当前帧和背景参考模型比较来检测运动物体的一种方法,但是由于场景的复杂性、不可预知性及各种环境干扰和噪声的存在,如光照的突然变化、实际背景图像中有些物体的波动、摄像机的抖动、运动物体进出场景对原场景的影响等,使得背景的建模和模拟变得比较困难。(3)帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。帧间差分法算法实现简单,程序设计复杂度低,对光线等场景变化不太敏感,能够适应各种动态环境,稳定性较好。
车辆边缘检测是判断车辆存在与否的重要依据,车辆的边缘检测方法有很多,有基于统计学方法的也有基于梯度或其他指标的,车辆边缘检测现在主要存在的问题是对图像中的噪声的处理以及对一些图像中细小的边缘的检测。
车辆排队检测通常采用移动检测窗的算法进行实现。原理是利用一个在摄像机图像里长度为一辆车长度的动态检测窗,从排队车辆的队头向队尾逐步移动,又由于近大远小的透视原理,所以动态检测窗的大小会根据车辆距离摄像机的距离变化,距离摄像机越远的地方检测窗的大小越小。
夜晚场景车辆排队检测
在夜晚场景下,环境光线变得微弱,考虑到夜晚行车的车辆都会打开车灯,因此选择车灯作为特征量对车辆进行检测。对于车灯作为特征量的夜晚车辆检测的准确性,过滤掉干扰光源是十分重要的。干扰光源包括路灯、路面反光及路标反光等。
夜晚场景下的车辆排队检测与日间场景的检测方法类似,夜晚场景下的排队检测采用的也是移动检测窗的排队检测方法。移动检测窗法的原理是从队首开始,在当前的检测窗内,若连续几帧都能通过车灯的检测判断检测窗内有车存在,则确定当前检测窗内有车辆在排队,移动检测窗向队尾方向移动一个车辆长度位置,排队队列变长;当出现连续几帧检测窗内都不出现车辆的情况,检测窗停止移动,排队检测结束。
排队长度计算
如果想要通过摄像机计算车辆队列的实际长度,就需要建立三维空间坐标和二维图像坐标之间的关系,其中的关键是建立摄像机的透视模型,通过实际测量,标定摄像机的内外参数,从而确定摄像机从三维空间坐标到图像中二维坐标的关系。
摄像机的标定方法有很多种,利用两条平行的车道线和车道的宽度对摄像机进行标定,这种方法不需要已知摄像机高度倾斜角等信息,且可以仅通过两条平行的车道线与实际测量的车道宽度的信息,就可以准确标定出所需摄像机的参数。这个标定方法简单实用,操作方便,且具有很高的准确性。
在对摄像机进行标定后,就建立了三维空间坐标到图像中二维坐标的关系,通过相应的计算公式,就可以通过二维图像里面排队车辆的长度推算出现实世界中的车辆队列长度。
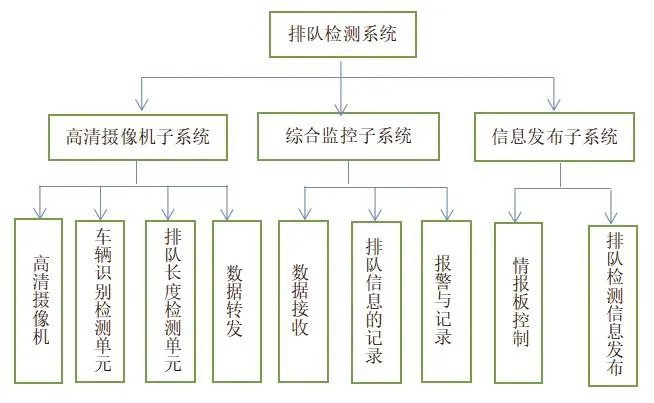
图1 系统构成图
系统实现和应用
系统实现排队检测的流程主要如下:通过两条平行的车道线和车道的宽度标定路段上的摄像机,建立三维空间坐标和二维图像坐标之间的关系;判断外部光照强度,若光照强度达到日间标准,则启用日间车辆排队检测算法;否则,采用夜间车辆排队检测算法;通过移动检测窗对高清摄像机图像进行检测,如出现排队情况,则计算队列长度;将排队信息上传至综合监控平台,监控平台通过可变情报板对排队情况进行发布或者通过语音提醒的方式进行排队事件提醒;将每次排队的信息,如地点、时间、排队长度等记录进排队检测信息查询表,并进行数据分析。
系统实际应用
通过排队检测技术在邢衡高速衡水段项目的实施,经过测试能够达到预期效果。以下是系统应用能达到的实际效果:检测车辆有无排队的情况;计算排队车辆队列的长度;接收排队检测的各类报警;能够进行语音事件提醒,并能够对事件进行确认处置,包括确认误报、解除事件等;进行排队事件的记录与查看。
系统可靠性需求
为了使系统对于排队检测中有无车辆排队情况的判断、车辆队列长度的计算,以及对车辆排队事件的记录与查询等功能更加准确与可靠,需要保证做到以下几点:摄像机的精确标定。对于车辆排队长度的计算十分重要,如果摄像机标定不准,从二维图像坐标到三维世界坐标的转换就会出现一定的误差,导致最后的队列长度计算出现极大的偏差;系统时间同步。由于系统需要对排队事件进行记录,方便统计、分析和查询,因此整个系统的时间同步性十分重要,对系统针对排队情况的统计分析的准确性有很大影响;系统通讯。摄像头视频图像的数据传输必须依靠网络,所以网络的畅通稳定可靠是保证系统正常运转必不可少的条件。
结语
邢衡高速公路全程信息化综合管理平台引入了排队检测系统,通过排队检测功能,平台系统可以通过摄像头的视频图像,检测当前有无车辆排队并且可以通过标定好的摄像头计算当前车辆排队的长度。系统还可以做到对排队进行语音提醒,同时系统会记录排队事件的信息,并对排队的信息进行数据分析,便于邢衡高速公路的管理单位提升高速公路管理水平,为邢衡高速公路的全程信息化综合管理打下了坚实的基础。
猜你喜欢
小学生学习指导(低年级)(2021年4期)2021-07-21
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
小学生学习指导(低年级)(2018年9期)2018-09-26
学生天地(2018年18期)2018-07-05
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
电子制作(2017年23期)2017-02-02
办公自动化(2016年18期)2016-12-17