
气动空间弯曲柔性关节静力学实验研究
2018-04-19 08:16刘洪波
吉林化工学院学报 2018年3期
刘洪波,刘 齐
(1.北华大学 工程训练中心,吉林 吉林 132021;2.北华大学 机械工程学院,吉林 吉林 132021)
目前机器人已经广泛的运用到军事、医疗、服务、娱乐、工业等各个领域,机器人已经成为了人们日常生活和工作中不可或缺的一部分[1-3].关节的驱动方式和结构性能在很大程度上决定了机器人的性能.关节的驱动方式主要有电机驱动、液压驱动、新功能材料驱动等.液压驱动的优点是输出力矩大,控制起来也较为简单,缺点是存在泄漏、成本较高,另外还需要专门提供高压油的供应系统.电机驱动关节的主要优点是控制方便且精确、洁净和噪音低等,缺点是质量大,柔性程度不高,不易工作在易燃易爆的工作场所[4,5].针对一些具有特殊功能要求的机器人,传统的关节驱动方式已经不能满足其使用要求,经过科研人员的努力,人们又相继开发出了一些新型的关节驱动技术,如:形状记忆合金驱动器[6](Shape Memory Alloy Actuator)、磁致伸缩驱动器[7](Magneto-strictive Effect Actuator)、压电驱动器[8](Piezo-Electric Actuator)和气动柔性驱动器[9](Flexible Pneumatic Actuator)等.其中,功能材料驱动因为成本高、技术尚不十分成熟,没有得到进一步的研究与开发.相比而言,气动柔性驱动器以其结构简单、低成本、清洁无污染以及较好柔顺性等优点得到了广泛的应用.
本文研制的关节,能够极好地实现轴向伸长和空间弯曲运动,具有较好的弯曲变形特性,可以作为柔性手指或者六足机器人的腿部使用.
1 关节的结构和运动原理
关节主要由弹性气囊、约束元件、弹簧等组成(图1),弹簧作为骨架分别与上、下端盖固定连接;弹性气囊分析上设有流体入口.弹性气囊、堵头和约束件三者构成的密封良好的腔体称为人工肌肉.该关节相当于由三个人工肌肉并联而成,具有三个自由度,能实现轴向伸长和空间弯曲[10].

图1 关节结构
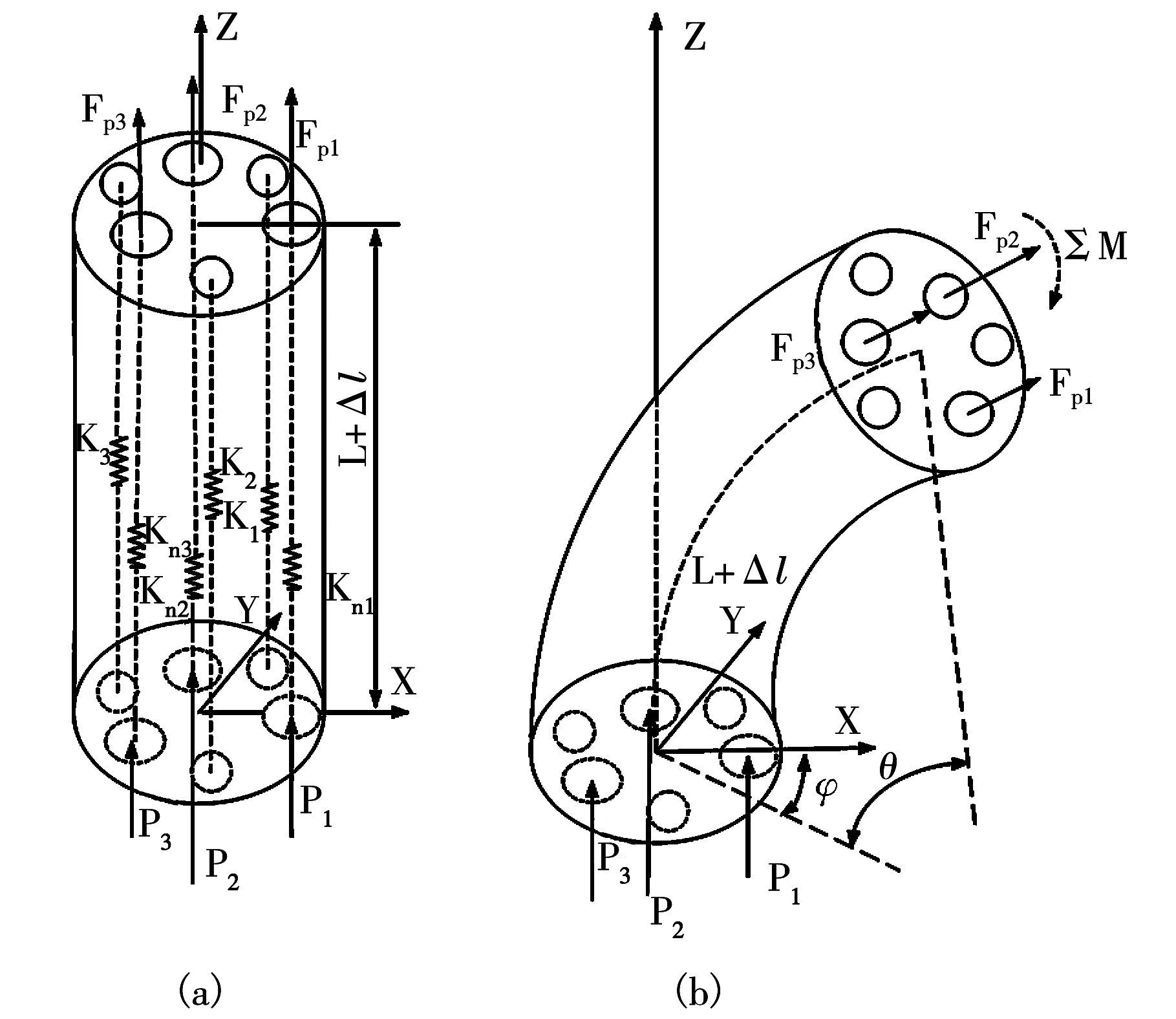
图2 关节受力分析
当P1、P2、P3(图2(a):K1、K2和K3分别是三个弹簧的轴向刚度;Kn1、Kn2和Kn3为三个乳胶管的轴向刚度))相同时,弯矩合为零,关节只沿轴线方向伸长,伸长量由气体压力大小所决定;当P1、P2、P3压力不同时,弯矩矢量合不为零,关节发生弯曲与伸长复合的变形(图2(b)),弯曲方向由弯矩矢量合的方向,弯曲程度由合力矩的大小决定.通过三个气压值即P1、P2、P3的控制,便可控制关节向各个方向弯曲和沿中心轴方向的伸长[11].
2 实验原理与数据分析
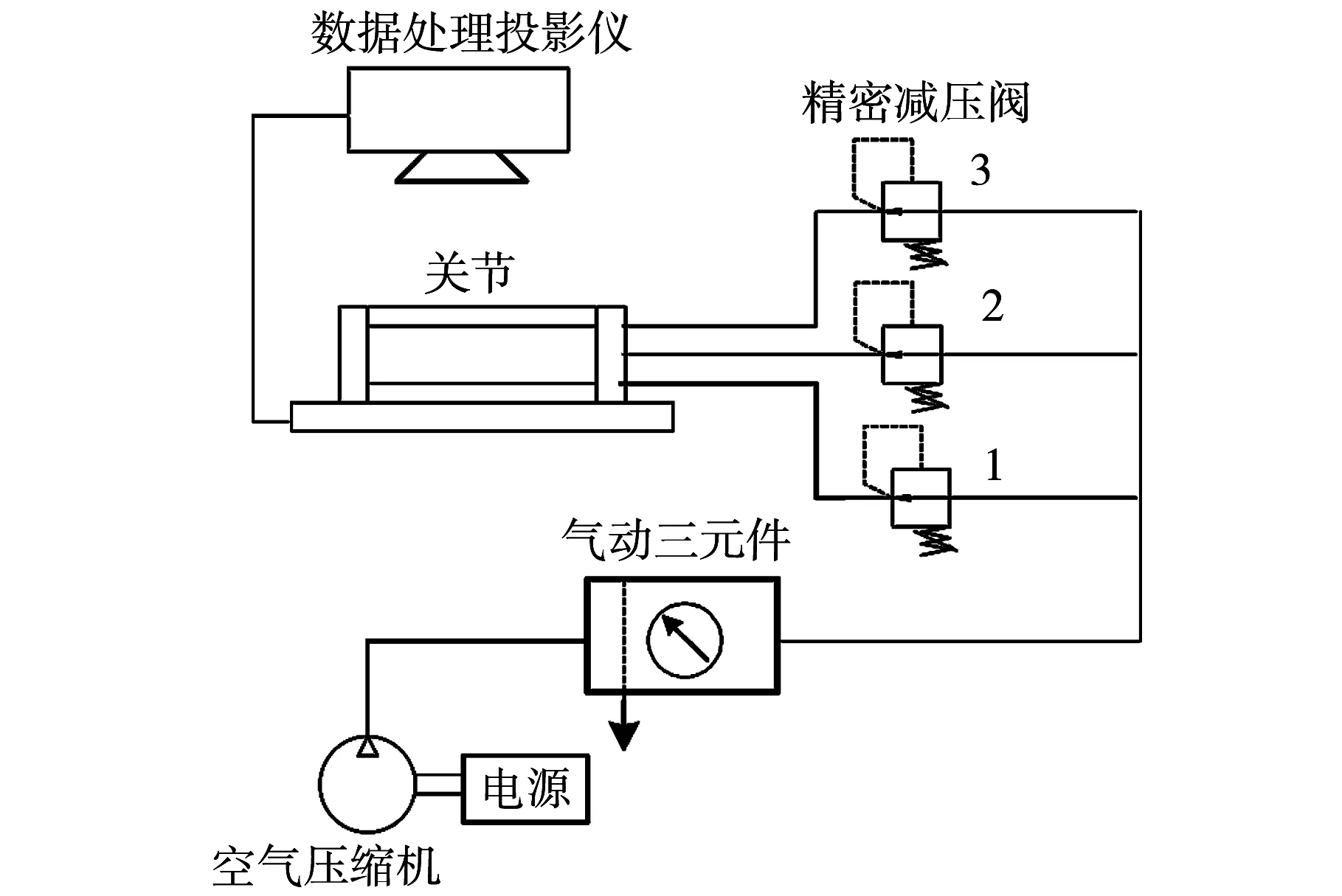
图3 实验原理
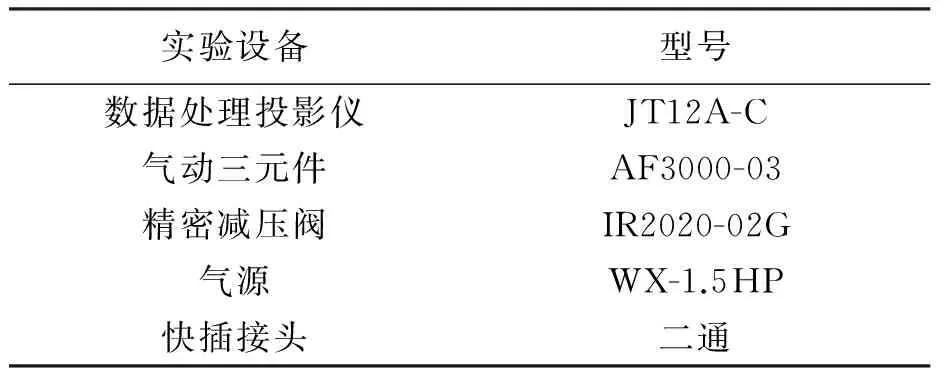
实验设备型号数据处理投影仪JT12A-C气动三元件AF3000-03精密减压阀IR2020-02G气源WX-1.5HP快插接头二通

表2 关节的参数
2.1 静态伸长实验
将关节一端固定,控制P=P1=P2=P3,逐渐增加通入气压值,可以通过数据处理投影仪测得关节不同压力下的轴向伸长量;然后逐步调低气体压力,测量关节伸长量与输入压力的关系,得到加压与减压过程中的关节伸长量与输入压力之间的关系曲线(图4).图5是在0.35 MPa时,关节的轴向伸长变形状态.
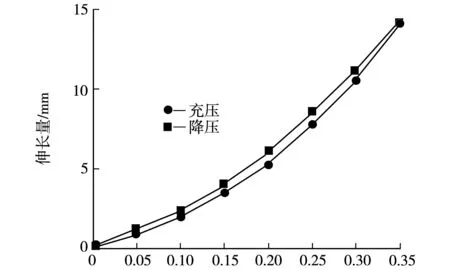
气压值/MPa图4 关节伸长量与输入气压的关系
从图4中可以看出,随着通入气体压力的增加,关节的轴向伸长量增大,而且曲线成非线性;在0.35 MPa压力时伸长量是13.4 mm,达到自身有效变形长度的31.8%;关节在充压和卸压两种状态下数据曲线不重合,而且卸压时伸长量比充压时大,说明橡胶材料变形存在一定的迟滞性.将获得的伸长量实验数据进行二次多项式拟合,拟合误差是0.267 85 mm,得到关节轴向变形伸长量的经验公式为:
Δl=87.74P2+8.884P+0.1013(mm)
(1)

图5 关节轴向伸长变形形态(P=0.35 MPa)
2.2 静态弯曲实验
实验中将关节一端固定,首先使P=P1、P2=P3=0,关节朝着P2和P3的方向弯曲,逐步调高气体压力P,测量关节单肌肉驱动时弯曲角度与输入压力的关系(图6).然后控制 P=P2=P3、P1=0,关节将朝着P1的方向弯曲,逐步调高气体压力,测量双肌肉驱动时关节弯曲角度与输入压力的关系(图8).图7、图9分别是在0.35 MPa时,不同驱动方式下关节的弯曲变形形态.
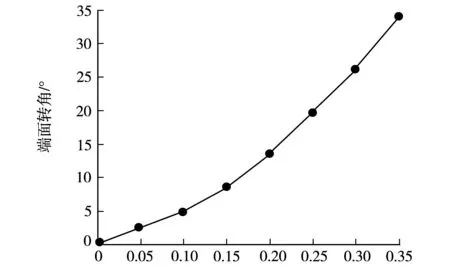
气压值/MPa图6 关节单肌肉驱动弯曲角度与气压的关系
从图6可以看出,单肌肉驱动角度随着气压值的增加而增加且曲线具有一定程度的非线性.说明关节在变形过程中要克服自身刚度影响,随着变形量增大,关节自身刚度减弱.单肌肉驱动时,拟合误差是0.577 69°,关节弯曲变形端面转角的经验公式为:
θ=196.5P2+28.01P+0.1817(°)
(2)

图7 关节单肌肉驱动弯曲变形形态(P=0.35 MPa)
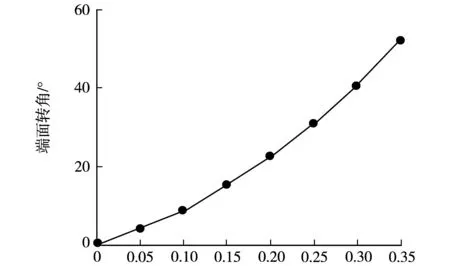
气压值/MPa图8 关节双肌肉驱动弯曲角度与气压的关系

图9 关节两肌肉驱动变形形态(P=0.35 MPa)
由双肌肉驱动角度变化曲线(图8)可知,相同气压值,双肌肉驱动弯曲角度大于单肌肉驱动弯曲角度,但不是二倍关系,说明关节弯曲变形量不仅与驱动力有关,还与关节结构形状有关.双肌肉驱动时,拟合误差是0.564 39°,关节弯曲变形端面转角的经验公式为:
θ=239.6P2+63.91P+0.2721(°)
BIM技术通过施工流程模拟、信息量统计,给项目管理提供重要的技术支持,使每个阶段要做什么,工程量是多少,下一步怎么干,每一个阶段的工作顺序是什么?都变得显而易见,使管理内容变得可视化,增强管理者对工程内容和质量的管控能力(见图1)。
(3)
3 结 论
本文研制了一种新型气动空间弯曲柔性关节,实验研究结果表明,关节虽然具有一定的非线性和迟滞性,但三肌肉并联组合的结构能方便地实现轴向伸长和空间弯曲,具有较好的柔性和实用性.通过对P1、P2、P3控制可以控制关节向各个方向弯曲和沿中心轴方向的伸长,从实验数据上得出,关节在0.35 MPa压力时,关节的伸长量是13.4 mm,达到自身有效变形长度的31.8%,双肌肉驱动弯曲角度达到52°,可以作为柔性手指或者六足机器人的腿部使用.
参考文献:
[1]Kanda, T.,Ishiguro,H.,Ono,T.,Imai,M.,Mase,K.:Development and Evaluation of Interactive Robot “Robovie”,IEEE International Conference on Robotics and Automation,2002:1848-1855.
[2]彭贺,刘洪波.气动驱动器种类及特点[J].吉林化工学院学报,2017,34(3):56-58.
[3]刘旭东.气动安全柔性关节的设计及其在机器人手指中的应用研究[D].镇江:江苏大学,2008.
[4]朱邦河.基于人工肌肉的仿生关节驱动器研究[D].郑州:河南工业大学,2014.
[5]武广斌,郑永永,刘荣辉.气动双体人工肌肉弯曲特性分析.吉林化工学院学报,2016,33(7):41-43.
[6]J.Abadie,N.Chaillet,C.Lexcellent.Modeling of a new SMA micro-actuator for active endoscopy applications[J].Mechatronics,2009(19):437-442.
[7]Du Trémolet de Lacheisserie E.Magnetostriction:Theory and Applications of Magnetoelasticity[M].Boca Raton:CRC Press,1993.
[8]Choi S B,Hong S R,Han Y M.Dynamic characteristics of inertial actuator featuring piezoelectric materials:experimental verification[J].Journal of Sound and Vibration,2007,302(4):1048-1056.
[10] 赵云伟,耿德旭,刘晓敏,等.三自由度气动柔性驱动器结构功能与形变特性研究[J].农业机械学报,2017,48(9):392-401.
[11] 耿德旭,刘洪波,刘晓敏,等.气动空间弯曲柔性关节运动功能实验研究[J].液压与气动,2015(11):41-44.
猜你喜欢
天然气与石油(2022年4期)2022-09-21
幼儿画刊(2021年5期)2021-12-02
北京航空航天大学学报(2021年6期)2021-07-20
电脑爱好者(2020年6期)2020-05-26
模具制造(2019年4期)2019-06-24
测控技术(2018年9期)2018-11-25
光学精密工程(2016年5期)2016-11-07
浙江大学学报(工学版)(2015年7期)2015-03-01
上海电机学院学报(2015年3期)2015-02-28
西安交通大学学报(2014年7期)2014-04-16
