一种基于多元回归的能见度检测方法
2018-04-19 11:35唐绍恩顾大权敬金瑞
网络安全与数据管理 2018年3期
唐绍恩,李 骞,顾大权,敬金瑞
(国防科技大学 气象海洋学院, 江苏 南京 210000)
0 引言
能见度是指视力正常的人,能从天空背景中看到并识别出目标物轮廓的最大水平距离[1]。作为一个重要的气象观测因素,能见度的检测不仅应用于气象领域,还广泛应用于陆上交通、航空航海、环境监测和军事等领域。因此,准确高效地检测能见度具有重大意义[2]。能见度的定义具有较强的主观性,其自身也是一个受诸多因素影响的物理量,因此国际上对于能见度的测量,缺乏相对统一的校准规范和检定规程。同时,大气中不同种类的悬浮粒子对光传播的影响不尽相同,难以定义精确的影响因子和物理模型准确反映能见度变化规律,因此,对能见度的自动观测与估计已经成为当前大气探测与大气科学领域研究热点之一。
目前能见度测量方法主要包括目测法、仪器测量和基于图像视频的测量方法等。目测法由人工估计得到能见度值[3],该方法的检测结果受观测人员的主观经验、视力情况和目标物的选择影响较大。检测能见度的仪器主要包括透射仪和散射仪两类[4]。其中,透射仪通过测量基线距离内一段空气柱的消光系数或透射率来测量能见度;而散射仪[5]通过测量一段空气柱对光的散射系数,反算大气消光系数,得到能见度估计值。上述仪器均通过局部区域能见度估计大范围的能见度,检测精度易受被检区域的大气质量影响,且普遍比较昂贵,难以满足能见度检测的实际应用需求。近年来,摄像机以其宽广的覆盖范围、丰富而准确的信息内容等优点被广泛应用于交通、安全等监控领域[6],研究者们开展了基于图像视频的能见度检测方法研究。
现有基于图像视频的能见度检测方法主要分为模型驱动和数据驱动两类。模型驱动法通过建立光在大气中传播的物理模型,分析光传播过程中大气衰减对图像的影响,估计模型中的相关参数并反推能见度。如胡平等[7]提出一种快速进行高速公路能见度检测的算法,该算法建立雾天图像光学模型,根据暗原色统计规律估计出大气光强和大气透射率,代回模型中求得能见度。HAUTIERE N等[8]提出一种交通能见度估计方法,该方法假设物体在场景中随距离变化连续分布,根据Koschmieder光线传播模型建立图像对比度分布和能见度之间的映射模型,提取含有道路区域和天空区域的均匀表面,通过计算该表面拐点处的对比度来估计能见度。模型驱动类方法估计能见度的精度与物理模型定义、参数设置紧密相关,而大气中影响光传播的悬浮粒子种类较多,影响因素较多,光传播物理模型通常难以准确定义。
数据驱动法将大量已标注的图像数据作为训练数据,训练并获取图像或视频特征与大气能见度的对应关系。如许茜等[9]提出一种基于图像理解的白天能见度检测方法,该方法在对图像兴趣域分窗处理的基础上提取像素对比度,利用先验数据集训练支持向量回归机构建图像特征与能见度值的关系模型,以计算场景能见度。KWON T M等[10]建立并训练神经网络,通过对不同能见度图像进行分类,计算相应的能见度等级。数据驱动法无需预先建立精确的光传播物理模型,可充分利用累积的先验数据,并能获得较高的检测精度。然而提取有效的图像特征以反映能见度变化规律,并建立对应的映射关系,成为决定该方法检测能见度精度的关键因素。为此,本文提出一种基于多元回归的能见度检测方法。首先,提取图像饱和度和多个兴趣域对比度,作为能见度检测的图像特征;然后,建立二元二次回归模型反映图像特征与能见度的映射关系,并采用标注数据作为训练集获取模型参数,获得的能见度检测模型可用于待测图像的能见度估计。实验表明,本方法具有较好的检测精度。
1 特征提取
现有计算机视觉系统对外部环境非常敏感,大气中悬浮的微小水滴、气溶胶的散射和吸收作用[11]造成了能见度的变化,也影响了传感器的最终成像效果,因此提取图像的有效视觉特征作为模型的训练输入,成为能见度检测的关键步骤。本文提取图像的饱和度和兴趣域对比度作为能见度检测的图像特征。
1.1 饱和度特征
大气中的气体分子和悬浮微粒通过衰减光的传输影响能见度,同时光传输的衰减导致不同色光光强改变,传感器采集到的图像色度发生变化,影响图像饱和度,因此本文将图像饱和度作为能见度检测的图像特征之一。由于常用的RGB颜色空间不能较好地表征视觉系统对颜色的感知,而HSI颜色空间从人的视觉系统出发,用色调(H)、饱和度(S)和亮度(I)描述色彩,比RGB颜色空间更符合人的视觉特性,因此本文提取HSI颜色模型中的饱和度(S)特征分量,作为检测模型的输入。为提取饱和度特征,首先将像素点(i,j)的R,G,B值分别做min-max归一化[12]处理:
(1)
max=Max(Ri,j,Gi,j,Bi,j)
(2)
min=Min(Ri,j,Gi,j,Bi,j)
(3)
其中,K为该点的R,G,B值之一。然后,根据饱和度(S)的计算公式[13]提取饱和度:
(4)
其中R、G、B分别对应RGB颜色模型中的红、绿、蓝颜色分量。最后,将图像整体饱和度均值作为输入检测模型的饱和度特征,记为X。图1中(a)和(b)分别是原始RGB图像和提取饱和度效果图。

图1 原RGB图像和饱和度图像
1.2 对比度特征
根据能见度的定义,能见度的改变受目标物与背景亮度对比的影响,在图像中表现为对比度的变化,因此本文将对比度作为能见度检测的又一图像特征。高对比度目标物可能被全局对比度平滑[14],全局对比度无法充分反映图像特征,因此可选取若干包含图像边缘的区域,即场景兴趣域。
输入检测模型中的对比度是各兴趣对比度的均值,记为Y;各兴趣域对比度为该兴趣域内所有像素点对比度的均值。设g(i,j)为某像素点的灰度值,其邻域像素灰度值分布如图2所示,则该像素点g(i,j)的对比度计算公式为:
Ccon=∑δ(i,j)2Pδ(i,j)
(5)
其中,δ(i,j)=|i-j|为相邻像素点灰度差,Pδ(i,j)为对应像素点分布概率。实际应用中,计算中心像素灰度值与周围8个邻近像素灰度值之差的平方和,再除以平方项的个数,即得该点对比度。

图2 像素点及邻域像素点灰度值分布
2 多元回归分析
为建立图像特征和能见度的关系模型,本文采用多元回归分析思想训练图像特征与能见度之间的回归模型。回归分析是利用大量观测数据,通过数理统计确定变量之间相互关系的重要统计方法[15]。常用的回归模型包括二元一次、二元高次、指数回归和插值回归模型等。综合考虑模型复杂度和拟合精度等因素,本文选择建立如下二元二次线性回归模型:
Z=β0+β1X+β2Y+β11X2+β22Y2+β12XY+e
(6)
其中,X为饱和度,Y为对比度,Z为能见度,βi和βij是待估参数,e是样本数据(X,Y,Z)的拟合误差。为了求解模型中待估参数,本文采用最小二乘法。假设样本数据中共包含n组样本值,则拟合误差为:
(7)
将拟合误差取平方作为观测点与估计点间距离的度量,即平方损失函数,记为Q:
(8)
由公式(7)和(8)可知,Q是βi和βij的确定函数,当模型的拟合效果最好时Q取最小值,此时Q对βi和βij的偏导数均为0。
(9)
(10)
由式(9)和式(10)得到βi和βij值,代入式(6),即得最佳回归模型。
3 实验结果分析
3.1 数据采集及模型训练
算法采用MATLAB平台实现,在配置为Intel i7-6700k 4.00 GHz单CPU、内存16 GB的PC上进行实验。实验样本图像数据通过固定地点的可旋转高清摄像机获取,采集时间为2016年7月12日至2016年12月8日,从7时至18时每个整点采集一次图像数据,图像分辨率为1 920×1 080,实验样本图像数据的标注值为当地的实时能见度观测值,并将其当作能见度检测真值。摄像机拍摄一次后自动旋转60°至下一场景继续拍摄,采集到6个场景图像数据共1 683帧,由于摄像机抖动或镜头污渍,采集到的部分图像数据无法使用,可使用图像数据共1 522帧,随机抽取1 000帧图像数据作为模型训练样本集,其余522帧图像数据作为模型测试样本集。为反映空气中悬浮微粒对不同距离处能见度的影响,本文在提取对比度时选取各场景中8个远近不同、细节丰富的兴趣域,如图3所示。

图3 兴趣域选取
为验证所选特征的有效性,本文分别绘制训练样本集图像数据的饱和度和多邻域对比度散点图,分别如图4中(a)和(b)所示。从图中可以看出,所提取的饱和度特征和多邻域对比度特征与能见度具有较高的相关性,可作为能见度估计的图像特征。
图像特征提取完毕后,利用训练样本集对第2节提出的二元二次回归方程进行训练,获得模型中包含的参数,绘制训练样本集数据分布和训练获得的回归曲面,如图5(a)所示。由图可知,训练获得的回归方程对现有数据具有较好的拟合效果。为与其他回归模型进行对比分析,本文利用相同训练样本集分别训练两种图像特征与能见度的二元一次、二元高次、指数回归和线性插值回归模型,拟合效果如图5(b)~(f)所示。分析拟合效果可发现,相比其他回归模型,本文提出的二元二次回归模型具有更好的拟合效果。
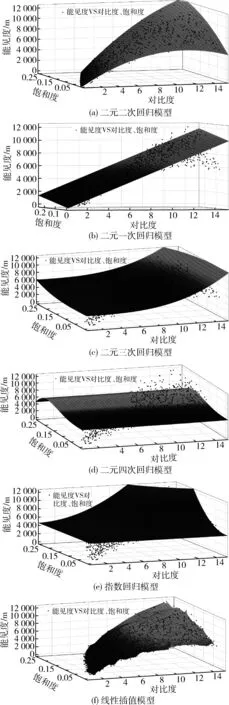
图5 不同回归模型拟合效果图
3.2 测试结果与分析
用测试样本集对3.1节训练获得的二元二次回归模型进行测试,将回归模型测试结果作为能见度检测值,将实时能见度观测值作为样本标注值。测试集的检测值和标注值分布曲线如图6所示。分析图6可知,测试集的检测值与标注值变化基本一致,除少数极值点外,能见度估计结果与标注值误差较小,这表明该模型在一般情况下效果较好。在能见度超过10 000 m或低于700 m时,部分样本图像的检测值低于相应的标注值,极少数样本出现检测值小于0 m的错误。经分析,可能的误差原因是能见度较高或较低时,饱和度和对比度受图像噪声影响较大,对模型的训练造成影响。
4 结论
本文提出一种基于多元回归的能见度检测方法,利用多元回归方法训练出图像饱和度、多邻域对比度与能见度之间的二元二次回归模型,该方法无需定义精确的影响因子和物理模型,能够有效降低计算复杂度。实验结果表明,该模型具有较好的检测精度,但在能见度较高或较低时误差较大。下一步工作是分析可能的误差原因,为获得更准确的检测效果,研究更好的图像降噪处理方法。

图6 检测值与标注值分布曲线
[1] 中国气象局.QX/T 114-2010 中华人民共和国气象行业标准:能见度等级和预报[S].北京:气象出版社,2010.
[2] 苗苗. 视频能见度检测算法综述[J]. 现代电子技术, 2012, 35(15):72-75.
[3] 孙学金. 大气探测学[M]. 北京:气象出版社, 2009.
[4] 李志乾, 张志伟, 成文,等. 海上能见度观测研究进展[J]. 自动化仪表, 2015, 36(10):33-36.
[5] 史倩义. 能见度/天气现象监视技术研究[D]. 天津:河北工业大学, 2007.
[6] SORO S, HEINZELMAN W. A survey of visual sensor networks[J]. Advances in Multimedia, 2009(1687- 5680):21.
[7] 胡平, 杨旭东. 高速公路能见度快速检测算法[J]. 公路交通科技, 2017, 34(4):115-122.
[8] HAUTIÉRE N, BABARI R, DUMONT É, et al. Estimating meteorological visibility using cameras: a probabilistic model-driven approach[C].Computer Vision-ACCV 2010-, Asian Conference on Computer Vision, Queenstown, New Zealand, 2010:243-254.
[9] 许茜, 殷绪成, 李岩,等. 基于图像理解的能见度测量方法[J]. 模式识别与人工智能, 2013, 26(6):543-551.
[10] KWON T M. Final report on signal and image processing for road condition classification [C].Aerotech Telub and Dalarma University under the 7 Swedish Nation Road Agency.Report,2002.
[11] Zhu Miaoliang, Qian Hui. Exploring Atmospheric Degradation Model of Landscape[J]. Journal of Computer Aided Design & Computer Graphics, 2001,13(9): 32-35.
[12] 张斌,常雷,童钟灵.基于矩的图像归一化技术与Matlab实践[J].兵器装备工程学报, 2010, 31(4):75-77.
[13] 王建新, 张有会, 王志巍,等. 基于HSI颜色空间的单幅图像去雾算法[J]. 计算机应用,2014, 34(10):2990-2995.
[14] HAUTIERE N, LABAYRADE R, AUBERT D. Real-time disparity contrast combination for onboard estimation of the visibility distance[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(2):201-212.
[15] 曲俊华, 倪家明. 多元回归模型分析与设计实现[J]. 中国电力教育, 2007(z2):140-142.
猜你喜欢
内蒙古科技与经济(2022年19期)2022-02-11
气象水文海洋仪器(2021年4期)2021-12-11
小资CHIC!ELEGANCE(2021年25期)2021-07-29
现代电子技术(2021年1期)2021-01-17
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
中国交通信息化(2016年6期)2016-06-06
气象研究与应用(2016年4期)2016-02-27
少儿科学周刊·儿童版(2015年7期)2015-11-24