
Bionic Attitude Transformation Combined with Closed Motion for a Free Floating Space Robot
2018-04-16 06:50ZhanpengSunYongjinLuLixianXuandLiangWang
Zhanpeng Sun, Yongjin Lu, Lixian Xu and Liang Wang,
(1.School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China; 2.704 Research Institute, China Shipbuilding Industry Corporation, Shanghai 200120, China; 3.8359 Research Institute, China Astronautic Science and Industrial Group, Beijing 100039, China)
With the rapid development in the aerospace industry field, space robots in free floating state attracts the attention of many countries, and the attitude transformation is an important research direction. Its realization methods mainly include reaction jet devices and reaction wheels at present. The reaction jet works by carrying the propellant. The propellant in the space is not renewable and has limited carrying capacity, so the life of the space robot will be obviously shorten by heavy use of spray. The inertia parameters of the reaction wheel are much smaller than those of the space robot, momentum saturation easily occurred in the attitude transformation, which leads to the delay of the target task. The reaction wheel has the quality that can not be ignored, that will greatly increase the cost of launching and maintaining the space equipment[1-4]. The phenomenon that a free-falling cat can rotate in the air has been studied since the end of the 19th century[5-6], which has attracted widespread attention of academics for exploring the rotation movement of a space robot under the condition of weightlessness. There has been many relevant analysis and research results since then. The bending theory brought up by Kane et al. is the most persuasive one[7]. Symmetric double rigid bodies analysis model was established based on the bending theory[8-10], the analysis results of the model explain the phenomenon very well.
In the joint space,the adjustment of the joint angle of the manipulator can affect the attitude of the base, and requirements of saving energy and reducing cost are satisfied. However, when the base attitude in this method satisfies the target, the pose of each link is not consistent with the initial state of the body[11-13]. Closed motion can ensure the consistency of attitude, but the efficiency of closed motion for attitude adjustment is relatively low. Even if the overall attitude transformation range is small, multiple closed motions are needed to achieve the target pose. The combination joint created by the bionic joint and closed motion can solve the problem in the overall attitude transformation, and deal with the situation that the link’s attitude is not consistent with the initial state. When there is an asymmetric case in the bionic joint, a certain disturbance is generated for the attitude transformation, so the correlation analysis is done in the attitude transformation, and the method of reducing interference is proposed.
1 Modeling
1.1 Bionic mechanism
The cat in the falling process bends at first, then the upper body does a similar cone movement relatively to the lower body (but the bodies do not twist relatively), so as to achieve the rotation. For the theory of bending, the double rigid bodies model proposed by Yanzhu Liu and others can well explain this phenomenon[14-15]. The modeling process is shown in Fig.1.The detailed analysis process can be checked in our previous articles referring to Refs. [16-17].
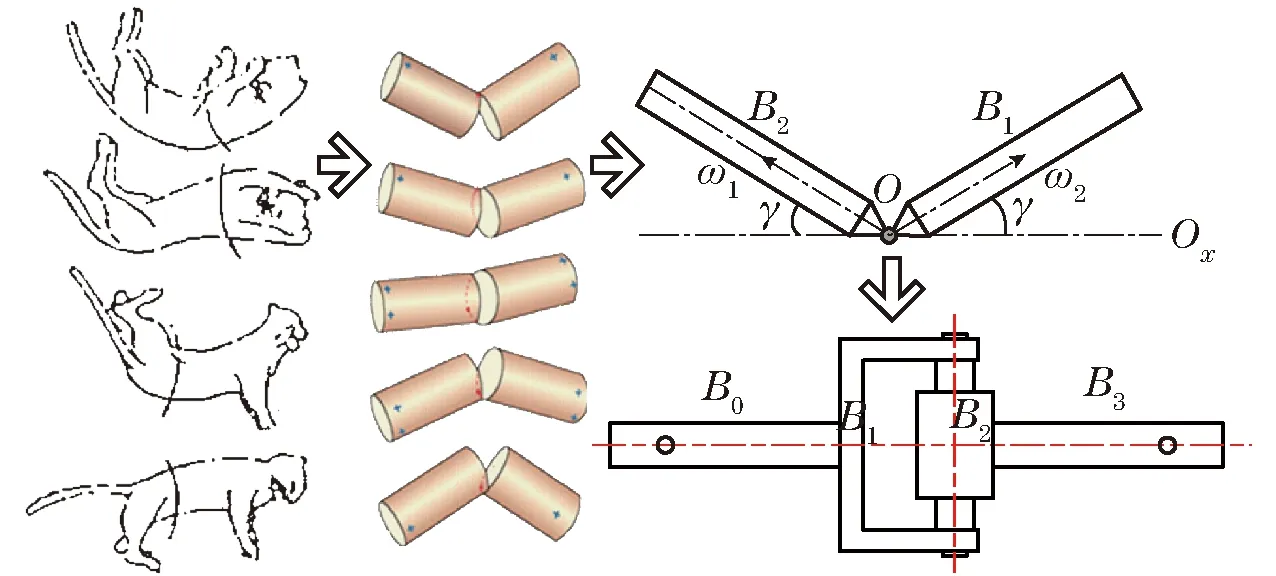
Fig.1 Modeling process
1.2 FFSR modeling
The free falling cat model is established in weightlessness conditions, and the overall attitude transformation of mechanism can be realized by a model with double rigid bodies. Therefore, the model can be applied to the attitude transformation of a free floating space robot (FFSR).

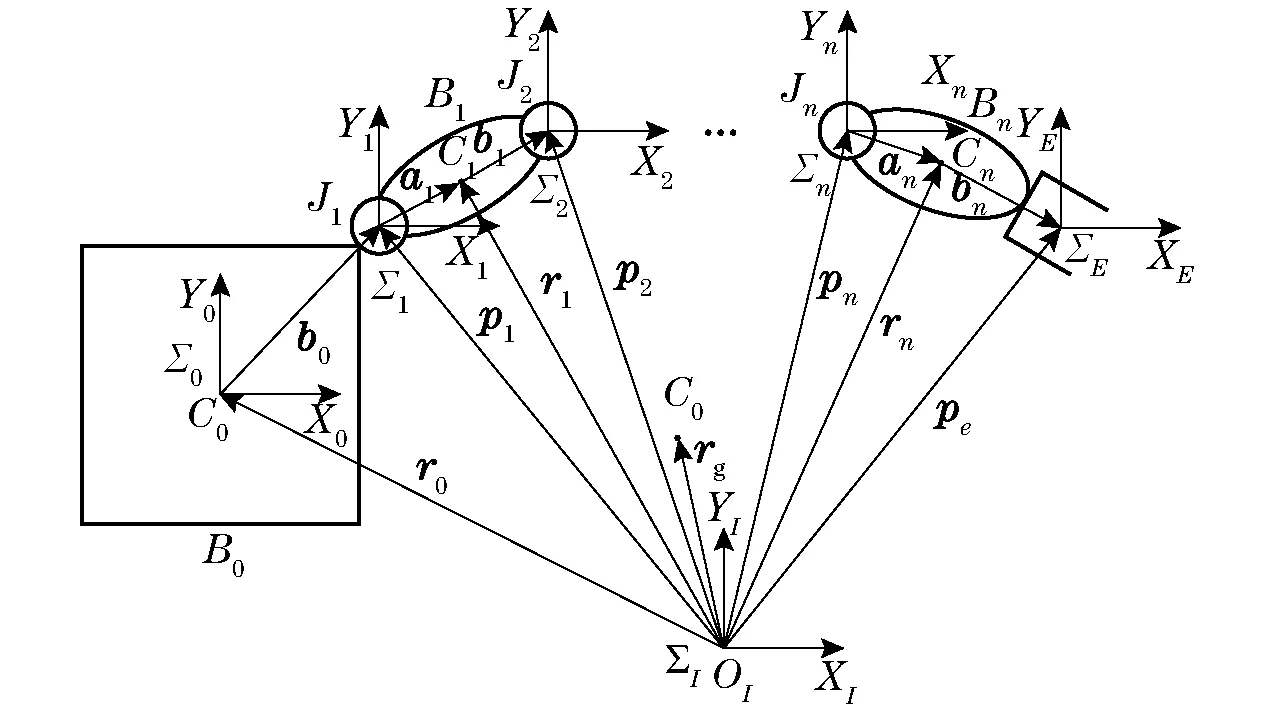
Fig.2 General model of the space robot
For the convenience of calculation and analysis, the origin of the inertial coordinate system is located at the center of mass system. It is easy to get linear velocity and angular velocity at mass center of each link as follows:
(1)
(2)
Put Eqs.(1),(2) into a matrix form, we have
(3)
The movement of the linkiis related to the position, attitude and speed of the base and to the rotation of the manipulator joints. The kinematics of linkican be derived from the kinematics of link 0 and joints angle movement.
Ignore the gravity and external force (torque), and assuming that the initial linear and angular momentum of the system are O,v0andω0can be calculated according to the law of linear and angular momentum conservation.
(4)
The studied specific attitude transformation belongs to the overall attitude transformation, and the base attitude is represented as the expression of the overall attitude transformation. Eq.(4) can be expressed as follows:
(5)
Put Eq.(5) into Eq.(3), the linear and angular velocities of other links can be obtained:
(6)
Theoretically, numerical integration of Eq.(6) leads to a position level solution. And then the numerical solution of the speed level of each link is obtained by an iterative method.
1.3 Closed motion
Firstly, the attitude transformation in the plane is analyzed, Supposing there is a planar mechanism with two degrees of freedom (TDF), as shown in Fig. 3.

Fig.3 Planar mechanism with TDF
The overall attitude changes can be found given a certain law of motion between joint 1 and joint 2. The joint 1 rotatesαangle first, then the joint 2 rotatesβangle, then the joint 1 recovers, finally the joint 2 recovers[22-23]. Repeat these movements for convenient observation, and then get the body’s posture as shown in Fig.4.

Fig.4 Attitude change of planar mechanism with TDF
Fig.4 shows a certain angle between the final and initial attitude which is different from a fixed base robot. This series of motion can be called closed motion. Closed motion requires at least two or more directional joints to achieve, and it cannot went exactly back with the application of the original inverse motion. Otherwise, the overall attitude changes will not be occurred.
So then, the overall transformation of planar robot can be realized by closed motion, and its rotation direction is the same as the joint pointing and perpendicular to the plane of the mechanism.
2 Combination Model and It’s Closed Motion
Can the double rigid bodies joint model be combined with closed motion? It is found that any two joints of the joint model cannot be parallel to each other or vertical to the robot plane formed by the axis of links 1 and 4. Therefore, it is necessary to try to increase a rotational joint on the joint model. The joint 2 is selected to cooperate with the new freedom in order to achieve the closed motion in that joints 1 and 3 can never be perpendicular to the robot plane. A 3D model is designed as shown in Fig.5.
The rotational joint 4 is added below the link 4 so that it is parallel to the joint 2 and perpendicular to the robot plane. Applying the closed motion of the space robot, the joint drive (joints 1 and 3 are not driven) is shown in Fig.6.

Fig.5 Combination model
The closed motion resultis obtained by simulation, as shown in Fig.7.The body axisX-Z-Xis adopted to represent the attitude, and the Euler angle parameters are namedX1,Z2andX3respectively in order to distinguish their order. As a result of the closed motion, only the attitude angleX1has changed and the other results are 0. The overall attitude of the space robot rotates about -3.23° around theXaxis.

Fig.6 Joints 2 and 4 drive settings

Fig.7 Attitude parameter X1 of link 1

Fig.8 Joints drive settings
The analysis results show that the overall attitude rotates a certain angle, but the angle is small, which is determined by the structure parameters of the space robot , the motion order and size of the joint angles.
The rotation range of single closed motion is limited due to the limitation of physical properties. Even if the motion is planned to have the maximum rotation angle, the desired rotation angle may not be achieved. So it needs several times before arriving at the target. For instance, if the rotation angle requires 105°, and each closed motion up to 5°, to achieve the target position needs 21 times of closed movements. In fact, the rotation angle of the closed motion is small but highly controllable, so it is of great practical significance.
3 Two DOF Attitude Transformation
First of all, two movements need to be defined:
① Joint motions of the two rotating joints (joints 1 and 4) in the same plane causes the overall attitude of the space robot to rotate about an angle in the vertical direction of the plane, which is called X rotation.

Fig.9 Attitude parameters of link1
② Joints motion(joints 1,2 and 3)causes the attitude to rotate about a central axis by a certain angle, which is called theZrotation.
The driving law of the joints in the ADAMS simulation model is shown in Fig.8.
The simulation is represented by the body axisX-Z-XEuler angles, as shown in Fig.9.
Ignoring the perturbation of theZrotation in the second stage, the overall attitude of the space robot can be completely determined by the two parameters which consist of attitude change angleφ1generated by closing movementXin the first stage andφ2generated around the center axis of rotationZin the second stage. Therefore, the TDF attitude transformation scheme is verified by the simulation.
4 Three DOF Attitude Transformation
The two DOF attitude transformation based on a bionic spatial mechanism is still very narrow for space robot applications. We will further analyze the implementation scheme of three DOF.
4.1 Attitude transformation
There are 12 ways to represent Euler angles of three DOF attitude transformation. In the TDF scheme, the motion of the attitude transformation consists of theXrotation and theZrotation. So there are two schemes for applying two kinds of rotation to three DOF, that is, the body axisX-Z-XandZ-X-Zwhich are consistent with the Euler angle representation. Therefore, the two schemes can realize arbitrary transformation of attitude. The three DOF attitude transformation based on the bionic mechanism is analyzed by taking the body axisX-Z-Xas an example.
The value of the target attitude has been given in the form of body axisX-Z-XEuler angle, and its implementation will be divided into three stages as follows:
① The rotationX1is achieved by joints 2 and 4 closed motion method;
② The rotationZ2is achieved by the bionic mechanism joints 1, 2, and 3;
③ TheX3rotation is achieved again by joints 2 and 4.
In the third phase, theX3rotation can be achieved, the second stage is about the central axis of rotation, in the calculation of the best rotation angle and bending angle, the rotation angle is calculated up to a multiple of 180 °, and let the bending angle slightly reduced small to reach the second stage of the target corner and keep axes of the joints 2 and 4 parallel.
Through the three stages of the rotation, not considering the second stage possible attitude disturbance, the space robot can realize the attitude transformation of body axisX-Z-Xwhich is a kind of generalized Euler angle. Any attitude in space can be represented by Euler anglesX-Z-X, consequently, the scheme is feasible.
Adopt the same simulation model as shown in Fig.3. The new closed motion still implemented by joints 2 and 4 is added to the combination model based on two rotation stages. And the rotation angles of the joints 1 and 3 are a multiple of 180°, so that the three DOF attitude transformation of the space robot can be realized. Set the drive for each joint as shown in Fig.10.
The simulation is represented by the body axisX-Z-XEuler angles, as shown in Fig.11.

Fig.10 Drive settings
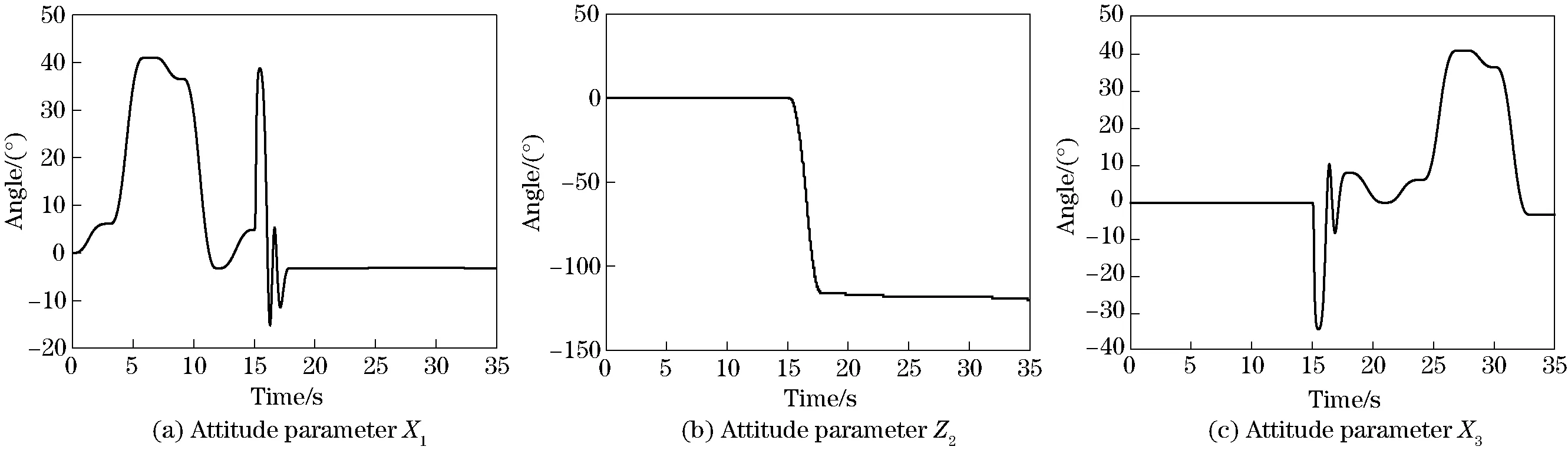
Fig.11 Attitude parameter of link 1
Ignoring the perturbation in the second stage, it can be observed that in the first stage only the value ofX1changes, and the second stage only see changes in the value ofZ2, and only the value ofX3changes in the third stage. Therefore, it can be seen that the three DOF scheme is feasible and coincides with the form of the body axisX-Z-XEuler angles.
4.2 Disturbance canceling
4.2.1Method
The related terms are explained firstly.
① The transformZrefers to the transformation of the Euler angle and does not produce any disturbance, while the rotationZrefers to the rotation of the double rigid bodies model joints, and there will be additional attitude perturbations.
② The transformXis the transformation in the sense of Euler angles, which is the same as the rotation of theXproduced by the closed motion.
In the three DOF attitude transformation scheme, the perturbation of the body axisX-Z-Xis only generated in the second stage. In the motion planning, rotationXoccurs in the first and third stages in the three DOF attitude transformation scheme. On the basis of satisfying the moving target, make rotationXcooperate with the rotationZ, that is, the rotationXis superimposed with a certain offset to balance the disturbance of the second stage. There will be no disturbance to produce finally in theory. The deduction is listed as follows:
RotationX1of the third stage:
(7)
RotationX3of the third stage:
(8)
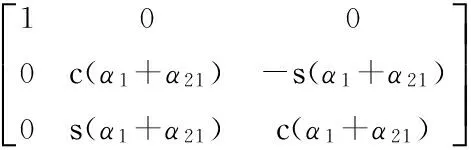
The rotationZ2of the second stage is expressed as the form of body axisX-Z-Xtransformation:
(9)
where Rot is the rotationX; Rotation is the composite movement,rotationZ. So the overall attitude transformation is:

(10)
Combine the first and two term matrices on the right of Eq.(10):
(11)
Then combine the fourth and five matrices on the right of Eq.(10):
(12)
So, it can be obtained according to Eq.(10):

(13)
It can be seen from Eq.(13) that the disturbance can be counteracted by the rotationXin thefirst and third stages respectively. Specific applications are as follows.
It is assumed that corresponding Euler angles areX1,Z2andX3respectively in the attitude transformation by the body axisX-Z-X. Firstly, planning the second stage of motion, so that the motion can reach the angleZ2, and calculate disturbance anglesα21andα23in the second stage. Then,before the start of the first and three stages of the motion planning, the first phase and the third phase have initial values ofα21andα23, Therefore, the value after planning should subtract the initial value, that is, the first stage planning value isα1=X1-α21, and the third stage planning value isα3=X3-α23.
Through the above analysis,it is found that the disturbance generated by the body axisX-Z-Xmode can be completely counteracted by motion planning. Theoretically, the attitude transformation without disturbance can be realized. This is of great significance for practical applications.
4.2.2Simulation
The purpose of combination joint is to complete the attitude transformation of the body axisX-Z-X, and the corresponding Eulerian angles areX1,Z2andX3respectively. The implementation process belongs to the motion planning. The key simulation results are only limited to the presentation and validation of the new structure. Motion planning research belongs to the following problems, and the related research results will be displayed soon.
Firstly, the second stage motion of the plan is set to reach theZ2angle which is displayed in the 5.1 solution. Then the perturbation angles corresponding to theX1andX3are separated, and they are superimposed on the first and third stages. Finally, the angle changes ofX1andX3can be observed as shown in Fig. 12 after the simulation. It can be found that when theZ2changes, the attitudes of theX1,X2at the corresponding motion are stable, and the useless disturbance has been eliminated. Therefore, the method of eliminating disturbance proposed is verified.
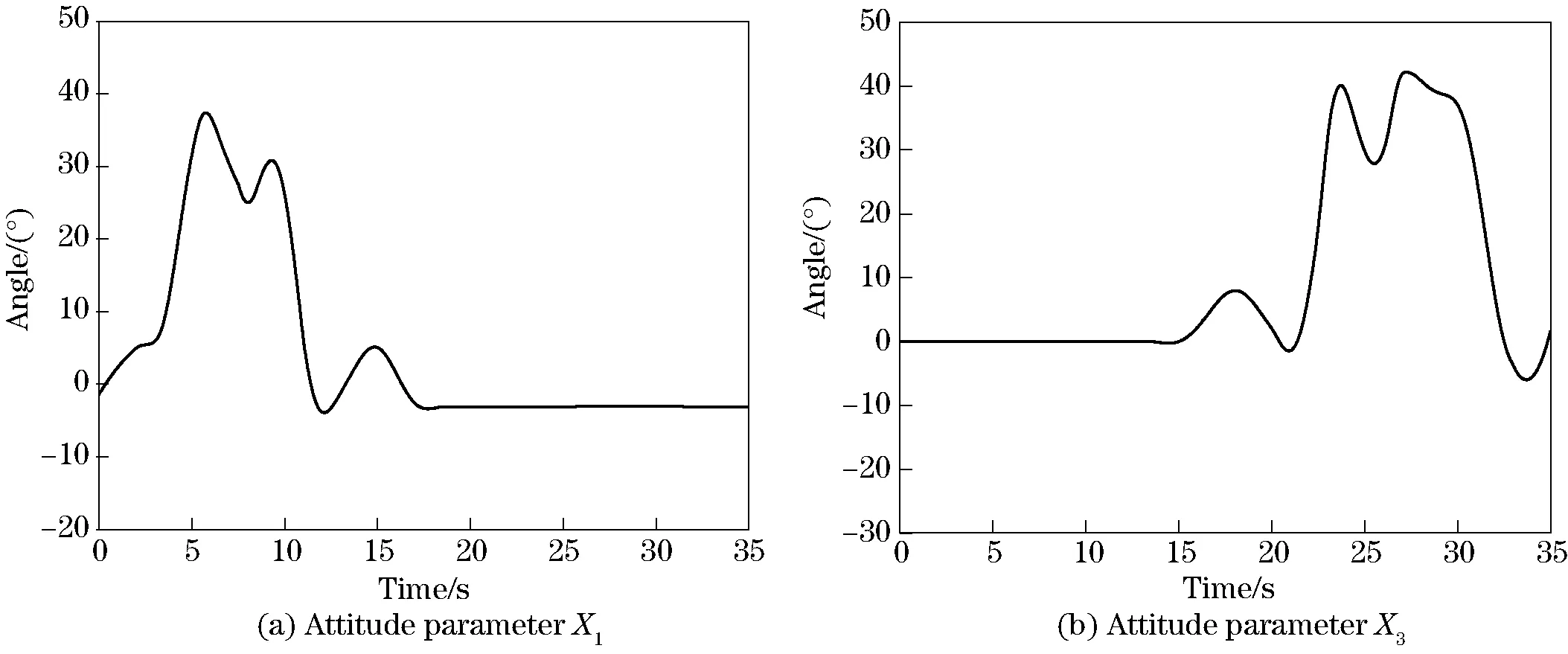
Fig.12 Attitude parameter of link 1 under disturbance cancellation processing
5 Conclusion
Space robot has a unique closed motion phenomenon, and the motion can only realize one DOF attitude transformation. The model with double rigid bodies based on bending theory can eventually achieve a rotation of the overall attitude. A new combination model is established by interweaving their characteristics, which can realize attitude transformation in planar, two DOF and three DOF space by simulation. However the rotation of the joint results in an additional perturbation. Therefore, a scheme to eliminate attitude perturbation is proposed, and resulting effects are derived in theory. The concrete realization of the scheme may need further study, and thus the application of the spatial attitude transformation of a bionic mechanism will may be a research direction in the near future.
[1] Dan K. Space servicing: past, present and future[C]∥ Proceedings of the 6th International Symposium on Artificial Intelligence and Robotics & Automation in Space: iSAIRAS 2001, 2001.
[2] Gmbh A U F A. Reaction wheels arranging device for use on Pico satellites, has gyroscopic wheels mounted on tetrahedron-shaped base body: DE202006000022[P]. 2006-03-09.
[3] Nobahari H, Bandikenari H, Darabi D, et al. Optimization of the reaction jet attitude control system using multi-objective adaptive real-coded memetic algorithm[J]. Journal of Aeronautical Engineering, 2011, 13(1):1-22.
[4] Wang B, Gong K, Yang D, et al. Fine attitude control by reaction wheels using variable-structure controller[J]. Acta Astronautica, 2003, 52(8):613-618.
[5] McDonald D A. How does a falling cat turn over[J]. Amer J Physiol, 1955, 129: 34-35.
[6] McDonald D. How does a cat fall on its feet[J]. New Scientist, 1960, 7(189): 1647-1649.
[7] Kane T R, Scher M P. A dynamical explanation of the falling cat phenomenon[J]. International Journal of Solids & Structures, 1969, 5(7):663-670.
[8] Liu Y Z. On the turning motion of a free-falling cat [J]. Acta Mechanica Sinica, 1982(4):388-393.
[9] Zhong F. A two-rigid-body model of the free-falling cat [J]. Acta Mechanica Sinica, 1985, 17(1):72-77.
[10] Guo M Z. A discussion on the shifting transformation and rotating transformation of inertial prouduct[J]. College Physics, 2004,23(6):23-31.
[11] Yamada K. Attitude control of space robot by arm motion[J]. Journal of Guidance Control & Dynamics, 2012, 17(5):1050-1054.
[12] Vafa Z. Space manipulator motions with no satellite attitude disturbances[C]∥ IEEE International Conference on Robotics and Automation, 1990 Proceedings, 1990,3:1770-1775.
[13] Yamada K, Yoshikawa S. Feedback control of space robot attitude by cyclic arm motion[J]. Journal of Guidance Control & Dynamics, 1997, 20(4): 715-720.
[14] Liu Yanzhu. Mechanical model of sports biomechanics[J]. Mechanics and Practice, 1983, 5(3):8-11.
[15] Ge X S, Liu Y Z. Nonholonomic motion planning for free-falling cat using Quasi-Newton method[J]. Journal of System Simulation, 2006, 18(5):1123-1126.
[16] Xu L, Wang L. Study on bionic rotation of a free-floating space robot[C]∥ International Conference on Fluid Power and Mechatronics, 2015:859-865.
[17] Sun Z, Xu L, Wang L. Study on bionic attitude transformation of free-floating space robot[C]∥ IEEE International Conference on Aircraft Utility Systems, IEEE, 2016:13-19.
[18] Xu Y, Root D K. Space robotics: dynamics and control[M]. New York:Springer, 1993.
[19] Umetani Y, Yoshida K. Continuous path control of space manipulators mounted on OMV [J]. Acta Astronautica, 1987, 15(12):981-986.
[20] Xin P, Rong J, Yang Y, et al. Inverse kinematics analysis of a 7-DOF space manipultor for trajectory design[J]. Journal of Beijing Institute of Technology, 2017, 26(3): 285-291.
[21] Wang H, Hong B. The general kinematic model and its simulation of free-flying space robot[J]. Journal of Astronautics, 2000, 21(3): 45-51.
[22] Yan J, Wu J. Screw motion analysis of a robot and spatial mechanism[J]. Journal of South China University of Technology(Natural Science Edition), 1991(1):93-99.
[23] Suzuki T, Nakamura Y. Planning spiral motion of nonholonomic space robots[C]∥ IEEE International Conference on Robotics and Automation, 1996 Proceedings, 1996,1:718-725.
 Journal of Beijing Institute of Technology2018年1期
Journal of Beijing Institute of Technology2018年1期
- Journal of Beijing Institute of Technology的其它文章
- Quantitative Method of the Structural Damage Identification of Gas Explosion Based on Case Study: The Shanxi “11.23” Explosion Investigation
- Compressional Deformation in Indentation Process for Microlens Array Mold
- Development and Verification of the Equilibrium Strategy for Batteries in Electric Vehicles
- Modeling and Optimization of Heat Dissipation Structure of EV Battery Pack
- Scheduling Optimization of Space Object Observations for Radar
- Chaff Jamming Recognition of Radar