一种全自动着舰仿真系统的设计
2018-04-13 08:15王冀龙董洪涛
现代导航 2018年1期
王冀龙,董洪涛
(1 中国电子科技集团公司第二十研究所,西安 710068;2 海军装备部西安地区军事代表局, 西安 710068)
0 引言
从 20世纪初航母出现在大家的视野后,经过近百年的发展,航母已经成为了名副其实的“海上堡垒”,它不仅是制海力量的体现,还能提供强力的制空权,这一切都和舰载机密不可分。航母虽然能在海上为舰载机提供平台,但是航母上的着舰跑道非常短,再加之海洋环境的复杂性和航母的多向自由移动性,使得舰载机着舰难度远超常规陆基着陆,舰载机着舰技术也成了保障航母战斗力的一个难点。
为了提高舰载机着舰的成功率和安全度,美国在1948年提出了自动着舰系统 (ACLS,Automatic Carrier Landing System)的概念[1][2],从一代的AN/SPN-10雷达,二代的AN/SPN-42雷达,改进了的AN/SPN-46雷达,一直到21世纪初将GPS系统引入ACLS,经过三代的发展,美国在自动着舰系统的研究已经相当成熟。它的自动着舰引导系统称为“全天候航母着舰系统(AWCLS,All-Weather Carrier Landing System)。全自动着舰技术在美国的舰载机着舰技术中成为了不可或缺的一环,我们很有必要深入研究。
1 仿真系统构成
通过学习借鉴美国全自动着舰引导系统,系统模拟 AWCLS,由两大部分组成:(1)机载导航仿真设备;(2)舰载导航仿真设备。两部分之间通过LINK-4A仿真数据链进行通信,舰机的运动状态在3D动画展示平台显示。其中机载导航仿真设备由GPS机载接收模块、综合数据处理模块、机载飞控系统组成。舰载导航仿真设备由 GPS设备、AN/SPN-46雷达、AN/SPN-41仪表引导设备、舰船姿态设备组成[2]。AN/SPN-46雷达、GPS设备、AN/SPN-41仪表引导设备、舰船姿态设备、综合数据处理模块的数据均可利用屏幕显示。仿真系统组成如图1。我们的仿真系统模拟完全自动驾驶阶段,当完好性出现问题或者系统判断出已不适合继续进行自动控制,就会提醒进入手动控制阶段并退出系统。
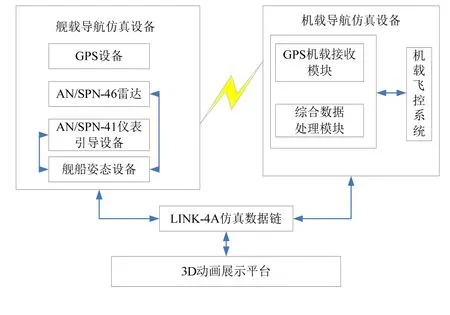
图1 仿真系统组成图
GPS设备主要是模拟生成实时航母位置数据,数据内容包括经纬度、高度。AN/SPN-46雷达主要是模拟生成实时雷达捕捉的飞机位置信息,数据内容包括方位角度、仰角角度、舰机距离、飞机航速、航向。AN/SPN-41仪表引导设备主要是模拟生成飞机实时位置的仪表数据,内容包括方位角度,仰角角度,舰机距离。舰船姿态设备主要是模拟生成航母的实时运动数据,包括航向、航速、纵横摇、升沉。GPS机载接收模块主要是模拟生成实时飞机位置数据,数据内容包括经纬度,高度。综合数据处理模块是根据距离判断出实时位置应该采用哪些设备提供的数据,并且对系统的完好性和数据的可信性做出判断。机载飞控系统实时生成飞机实时姿态,包括航向、航速、横滚、俯仰。LINK-4A仿真数据链主要是将舰载导航仿真设备中各设备生成的数据传送给机载导航仿真设备,并将机载导航仿真设备生成的飞机姿态传送给舰载导航仿真设备,同时将舰机姿态提供给3D动画展示平台。3D动画展示平台主要建立了航母、飞机和海洋的3D模型,并且能生成根据仿真系统生成的舰机姿态、位置数据的演示动画。
2 仿真系统工作流程
系统工作之前要设定舰机初值,我们通过综合数据处理模块输入航母的经纬度、航向,航速,飞机相对于航母的高度、距离、方位角、飞机的航向,航速,以及着舰的下滑角。在整个系统中,我们采取的是定坐标系,整个流程中坐标系的原点都在航母的初始位置中心,X轴是舰艏方向,Y轴为X轴逆时针旋转90°,Z轴过原点且垂直于XOY平面。如图2。
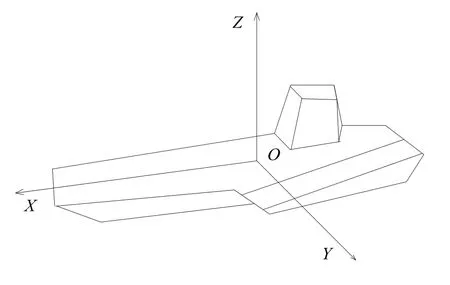
图2 系统坐标系
初值和坐标系确定后,综合数据处理模块会产生T0时刻的舰机数据D0(舰经度(t0),舰纬度(t0),舰高度(t0),舰纵摇(t0),舰横摇(t0),舰航向(t0),舰航速(t0),机高度(t0),机经度(t0),机纬度(t0),机速度(t0),机航向(t0),机俯仰(t0),机横滚(t0),下滑角()θ)。数据会通过仿真数据链传给舰载导航仿真设备,同时也发送给GPS机载接收模块。
AN/SPN-46雷达生成增加了雷达误差的数据(机方位角(t0),机仰角(t0),舰机距离(t0),机速度(t0),机航向(t0))+Y(t0)。其中Y(t)是雷达设备的系统误差函数。这些数据会显示在 AN/SPN-46雷达的模拟显示界面上。
AN/SPN-41仪表引导设备生成增加了仪表误差的数据(机方位角(t0),机仰角(t0),舰机距离(t0))+Z(t0)。其中Z(t)是仪表设备的系统误差函数。这些数据会显示在仪表设备的模拟显示界面上。
舰船姿态设备生成增加了其设备误差的数据(舰升沉(t1),舰纵摇(t1),舰横摇(t1),舰航向(t1),舰航速(t1))+G(t1)。其中G(t)是舰船姿态设备的系统误差函数。这些数据会显示在舰船姿态的模拟显示界面上。
GPS机载接收模块生成增加了 GPS误差的数据(机经度(t0),机纬度(t0),机高度(t0),)+H(t0),其中H(t)是 GPS机载接收模块的系统误差函数。这些数据会显示在GPS设备的模拟显示界面上。
同时综合数据处理模块根据舰机距离和角度首先生成一个盘旋后进入舰尾正后方 50km,高度为50sinθkm处的曲线,如图3,并将该曲线发送给机载飞控系统。在到达该位置时,飞机的航向角应和航母的航向角保持一致,飞机的俯仰角应为θ,飞机的横滚角为0°[3]。
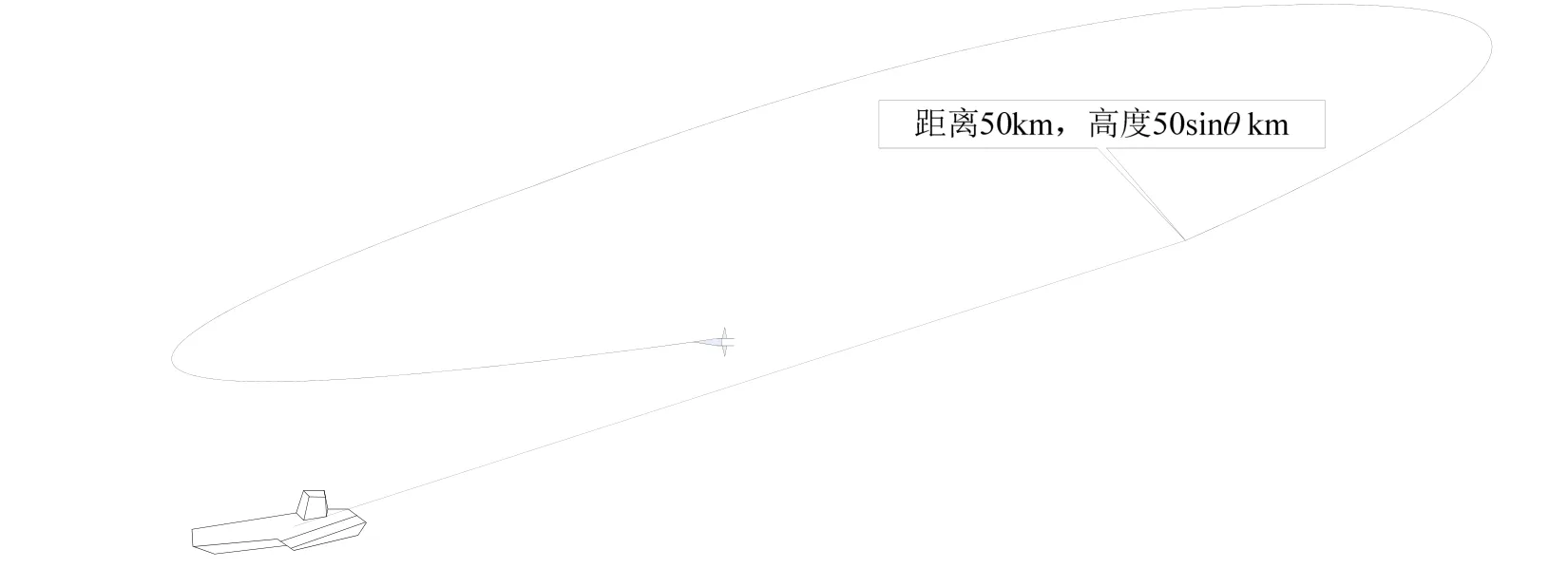
图3 飞机进近前的盘旋曲线
所有设备的数据通过 LINK-4A仿真数据链传输给综合数据处理模块,同时GPS设备的数据传输给 GPS机载接收模块,GPS机载接收模块用两个GPS的数据算出GPS系统获得的飞机角度信息(机方位角(t0),机仰角(t0),舰机距离(t0))并传输给综合数据处理模块。
综合数据处理模块接收到由 GPS系统、AN/SPN-46雷达、AN/SPN-41仪表引导设备模拟运算得到的飞机数据,经过判决采用其中的一个数据成为飞机位置真值,并送给机载飞控系统,机载飞控系统根据得到的飞机位置真值和计划的飞行曲线做比较,得到飞机下一刻的位移以及下一刻的飞机姿态(机速度(t1),机航向(t1),机俯仰(t1),机横滚(t1))。并将其传给综合数据处理模块。综合数据处理模块根据这些数据生成T1时刻的舰机数据D1(舰经度(t1),舰纬度(t1),舰升沉(t1),舰纵摇(t1),舰横摇(t1),舰航向(t1),舰航速(t1),机高度(t1),机经度(t1),机纬度(t1),机速度(t1),机航向(t1),机俯仰(t1),机横滚(t1),下滑角()θ)。并将这些数据再次传给舰载导航仿真设备,同时也发送给GPS机载接收模块。不断重复上述的步骤生成T2、T3……时刻的数据,直到飞机成功着舰或者系统退出自动模式。其中生成的数据也会实时传送到3D动画展示平台,如图4。
3 设备选择
系统中有三种设备提供数据,所以对数据使用或抛弃的判决是很重要的一个环节。设备的选择首先和作用范围相关,各设备的作用范围如图5。
从图 5看出,GPS设备覆盖范围最广泛,AN/SPN-41的作用范围是90m到40km,AN/SPN-46的作用范围是50m到15km。 在作用范围的约束下,我们对设备的选择遵循以下原则:
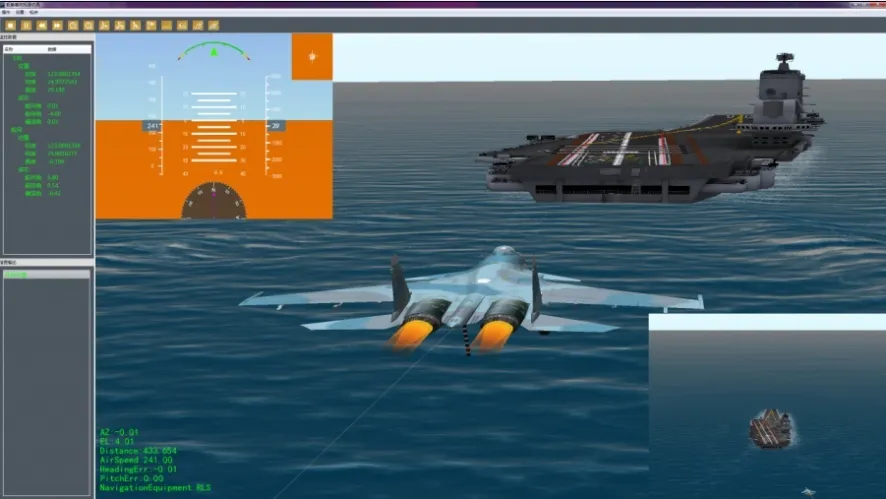
图4 3D动画展示平台
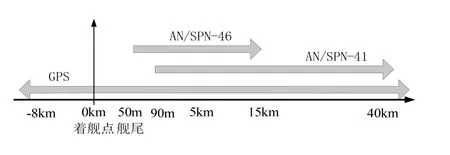
图5 各设备的覆盖范围
(1)第一阶段:从飞机做曲线盘旋进入到50km处和从50km处飞进至40km时,选择使用GPS系统数据,AN/SPN-41和AN/SPN-46数据此时处于无效状态。
(2)第二阶段:从飞机从40km处飞进至15km处,选择使用 AN/SPN-41数据为第一采纳数据,GPS系统数据为备份数据,AN/SPN-46数据此时处于无效状态。
(3)第三阶段:从飞机从15km处飞进至300m处,选择使用 AN/SPN-46数据为第一采纳数据,AN/SPN-41数据为第二采纳数据,GPS系统数据为备份数据。
(4)从300m处至着舰点,认为飞机已经可以靠惯性自主安全着舰。
4 完好性判决
对于舰载机自动引导,完好性判决是最核心的一环,它直接决定着飞机成功降落的安全度。真实着舰引导的完好性判决是一个非常复杂的过程,其中会有大量的舰面指挥人员参与。我们的系统模拟的是全自动的流程,所以系统中完好性的均以设备状态和数据准确度来判决。
我们将完好性判决程度设置为两级:低安全级和高安全级。
低安全级:在任何一个阶段,只要有一个设备可以正常工作即视为系统完好,可以引导。在第一阶段,只要GPS设备没无故障,即视为可以正常引导,若出现故障,则提示转为手动并退出系统。在第二阶段,只要 AN/SPN-41无故障,则使用AN/SPN-41进行引导,若AN/SPN-41出现故障,则转为使用GPS设备引导,若GPS设备出现故障,则提示转为手动并退出系统。第三阶段先使用AN/SPN-46,若 AN/SPN-46出现故障则转为使用AN/SPN-41,若 AN/SPN-41出现故障则转为 GPS设备引导,若GPS设备出现故障则提示转为手动并退出系统。可以看出,低安全级时对数据没有经过判决,不能保证在引导过程中的舰机数据的完全准确性。这种程度的判决危险系数很高,除了极端条件下并不推荐使用。
高安全级,在任何一个阶段,均要所有设备都正常工作,且第一采纳数据要在第二采纳数据和备份数据的精度范围内。在第一阶段,和低安全级判断方式一致。在第二阶段,AN/SPN-41数据需要在GPS设备数据+GPS系统精度的范围内,否则要提示切换至手动并退出系统,如图6。在第3阶段,AN/SPN-46数据应当在AN/SPN-41数据+仪表系统精度的范围内,还应当在GPS设备数据+GPS系统精度的范围内,否则要提示切换至手动并退出系统,如图7。
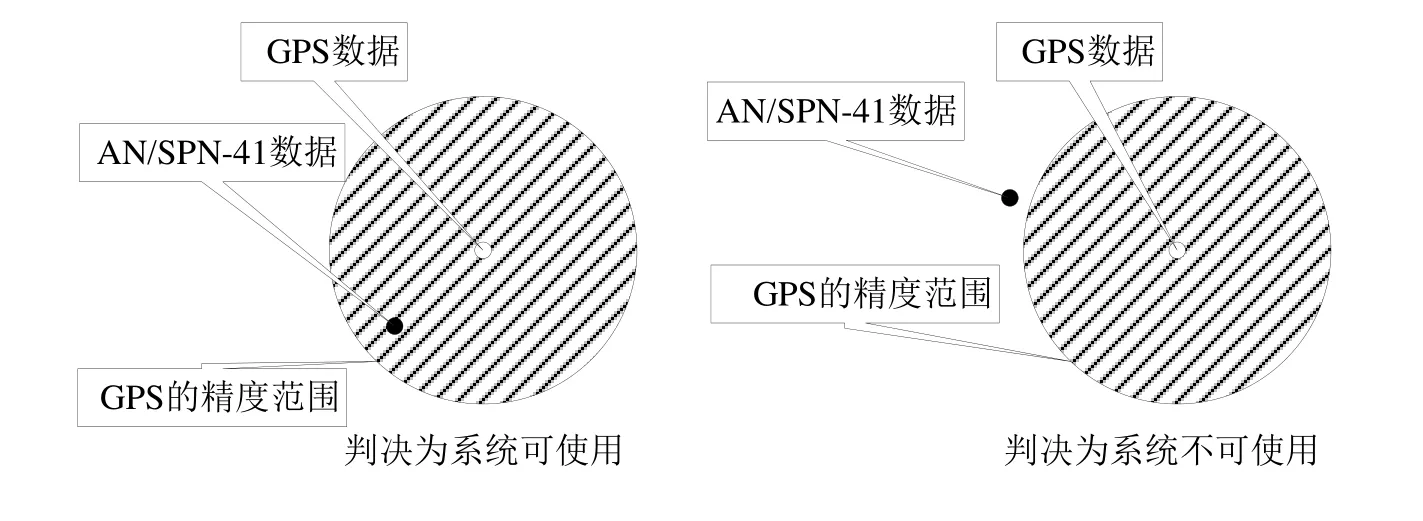
图6 第二阶段的数据判决

图7 第三阶段的数据判决
5 结论
全自动着舰是一个复杂的过程,如何保障舰载机甚至舰载无人机可以实施安全可靠的全自动着舰将会是未来几年内航母舰机起降技术中的一个重点和难点。但也是一个必须突破的技术关键点。本文设计了一种针对全自动着舰的仿真系统,并设计了在引导过程中的系统工作流程、设备选择和完好性判决方法,为全自动着舰提供了一种仿真模型。同时,系统还有很高的可扩展性,例如增加不同飞机的飞控参数,可以模拟更多类型的飞机着舰过程。继续增加导航设备,可以更加模拟仿真度更高。详细设计每种设备的误差函数和性能指标,则可以使模拟过程更加精确。用大地坐标系代替平面坐标系,甚至可以代入某些海域的地图,达到可计算环境的仿真。
参考文献:
[1]黄士飞, 钟兴泉. 全自动着舰引导系统展望[J]. 现代导航, 2014(1).
[2]雷文军. 航空母舰着舰技术发展研究[J]. 导航, 2009(3).
[3]潘婷婷. 舰载机进近着舰航线设计及控制系统仿真[D].南京航空航天大学, 2014.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
水泵技术(2021年3期)2021-08-14
新世纪智能(高一语文)(2021年3期)2021-07-16
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
模具制造(2019年7期)2019-09-25
民用飞机设计与研究(2019年4期)2019-05-21
故事大王(2019年4期)2019-05-14