机器人避障红外测距传感器性能分析
2018-04-12 03:04崔俊宇温秀兰张腾飞
电气电子教学学报 2018年1期
崔俊宇, 温秀兰, 张腾飞, 芮 平
(南京工程学院 自动化学院, 江苏 南京 211167)
0 引言
目前用于机器人避障的传感器主要有红外传感器、双目视觉传感器、激光测距仪和超声波传感器等[1]。由于双目视觉传感器受环境影响大且测量结果需要进行图像处理,计算复杂,不利于实时控制;激光测距仪成本高且易受环境光的干扰;超声波存在测量盲区的问题[2,3]。因此本文选用红外传感器进行机器人避障测距。该传感器结构简单、性能优良、成本低廉,在短距离测量上已得到广泛的应用[4]。
1 机器人避障硬件结构
为了提高红外传感器实验过程中数据采集的效率以及减小测量的误差,本文采用埃夫特ER10L-C10机器人作为载体来进行障碍物测量实验。基于红外测距传感器的机器人避障硬件结构如图1所示,将红外测距传感器安装在ER10L-C10机器人末端的法兰盘上,通过阿尔泰USB2817数据采集卡获取电压输出信号。

(a)平面障碍物实验图

(b)阶梯状障碍物实验图图1 实验整体图
整个实验中每运动1 cm进行数据采集,数据采集卡每40 ms进行一次数据采集。
2 红外测距传感器测量信号处理
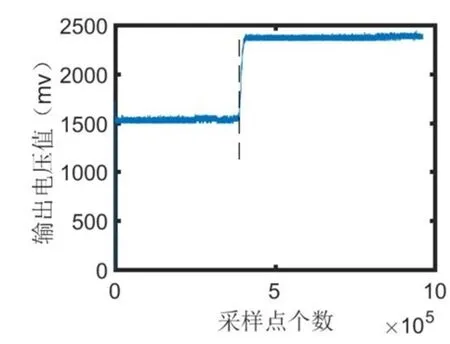
实验信号的采集过程存在一定的噪声干扰,如图2所示。为消除噪声对输出电压信号的影响,采用硬件滤波和软件滤波两种方法进行去噪处理,将两种方法得到结果进行比较,并对其处理结果进行拟合分析,以便得到红外测距传感器的输出电压和测量距离之间的关系。
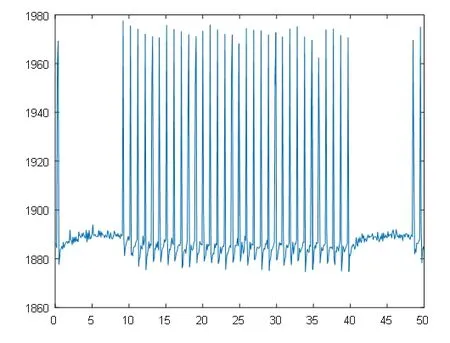
图2 传感器输出信号图
2.1 硬件滤波
采用硬件低通滤波的目的是为了降低噪声干扰,便于后续信号处理,所以选择较为普遍的RC低通滤波器,如图3所示。在测量电路中加入RC低通滤波器进行试验,并采用最小二乘法拟合测量距离和输出电压之间的关系[5]。
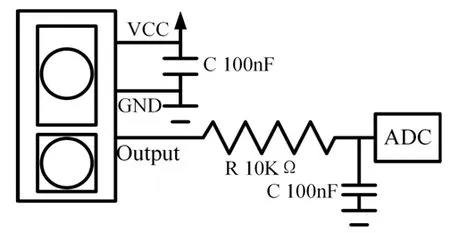
图3 硬件滤波器电路图
2.2 软件滤波
软件滤波常用巴特沃斯滤波器、切比雪夫滤波器、贝塞尔滤波器等来实现。相比于切比雪夫滤波器和贝塞尔滤波器,巴特沃斯低通滤波器具有最大平坦幅频响应特性、良好的线性相位特性、结构简单、易于设计等优点,且其通带扁平度和脉冲响应度都优于其它滤波器[6]。所以本文采用巴特沃斯滤波进行软件滤波,用Matlab编写巴特沃斯滤波程序如下[7]:
Butterworth滤波器:
[B,A]=butter(Wp,Ws,Rp,Rs)
[b,a]=butter(B,A)
[b,a]=butter(B,A,'ftype')
[h,f]=freqz(b,a,n,Fs)
其中,Wp表示通带截止频率;Ws表示阻带截止频率;Rp表示通带纹波系数;Rs表示阻带纹波系数;B表示滤波器最小阶数;A表示截止频率。b,a分别表示阶次为B+1的数字滤波器系统传递函数的分子分母多项式系数向量;Fs为采样频率;n为在区间[0Fs]频率范围内选取的频率点数;f记录频率点数;ftype取low表示低通滤波器。
将采集的数据经上述程序滤波,再采用最小二乘法来拟合测量距离和输出电压之间的关系。
2.3 滤波效果对比
将硬件滤波和软件滤波处理之后的数据用最小二乘法拟合,并与理论曲线进行对比,拟合结果如图4所示[8]。
从图4可以发现采用软件滤波和硬件滤波得到的拟合曲线与理论曲线基本一致,滤波效果相似。

图4 测量距离和输出电压拟合曲线图
其中,硬件滤波和软件的拟合曲线和理论曲线相似,证明实验选用的RC低通滤波硬件方法有效。
在机器人快速运动时,为了能够有充足的缓冲距离来调整下一步的运动,要求整个系统要有较短的反应时间,数据处理简单。同时,为了实验数据采集以及处理过程的高效、简便、高响应性,减小实验的计算量,实验中采用RC低通硬件滤波器进行数据滤波处理,从而避免软件滤波对数据处理过程可能带来的滞后影响。
由图4可以看出,整个拟合曲线在测量距离大于15 cm的区域波形较稳定,实际操作中也就选用该区域测量与障碍物之间的距离。同时,在红外测距传感器与障碍物的距离达到85 cm之后时,其输出电压与距离之间的变化关系开始减缓,移动2 cm时才能有明显的数值变化。这段距离在之后的机器人避障系统中可以应用于障碍物距离的预判断,以及在机器人运动过程中,遇到障碍物减速的信号。
3 传感器数学模型
红外测距传感器的输出电压和测量距离之间的关系呈非线性关系,且红外测距传感器的测距信息是机器人避障的重要依据,因此需要对其进行标定和曲线拟合。
由选用的红外测距传感器的产品规格参数要求可知,输出模拟电压与测量距离成反比非线性关系[9]。
将红外测距传感器应用于机器人避障中,要求传感器在有效测量范围内精度高,误差低。由图4可知该传感器在15~85 cm的测量范围内,测量灵敏度高,因此选取该测量范围内的数据,采用最小二乘法进行曲线拟合,不同阶次下的拟合结果如图5所示。观察图5拟合曲线与实际测量值之间的关系,可以发现随着拟合阶次的提高,拟合曲线没有特别明显的变化。计算1到3阶次下各点实际值与拟合曲线间的残差平方和,其值分别为222.02695,221.995,215.4958。由此可见,残差平方随着拟合阶次增加略有减小,但变化不大,在实际应用中为了提高避障速度,选用一次拟合曲线关系进行数值计算[9,10]。

(a)一次拟合关系
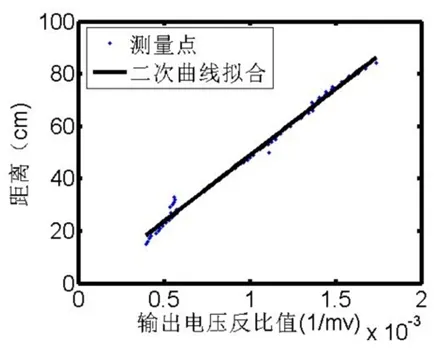
(b)二次拟合关系
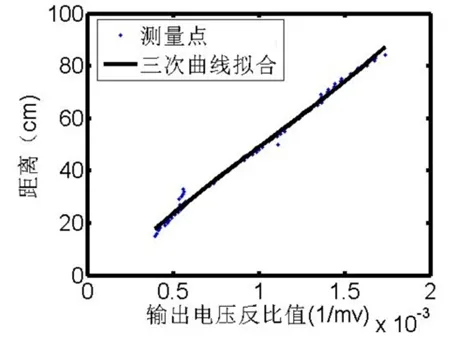
(c)三次拟合关系图5 模型拟合图
4 对障碍物的识别性能分析
为了将该传感器应用于机器人避障,对该传感器的动态性能提出相应的要求,即在动态环境中能否有效测量距离、速度变化对测量的影响,该传感器能否有效识别不同高度差的阶梯状障碍物以及在不同速度下能否有效识别阶梯状障碍物等。
针对红外测距传感器在实际中应用能力分析,本文选用动态环境中红外测距传感器对障碍物的辨别能力以及对阶梯状障碍物的识别能力进行实验分析。
4.1 传感器动态数据采集
按照图1(a)所示,使安装距离传感器的法兰正对测量物体,控制机器人以不同速度(机器人最大运动速度的5%、10%、15%)运动,使得红外测距传感器在距障碍物10~120 cm的垂直高度间做往返运动,连续采集信号。拟合输出电压信号和数据采集点之间的关系可以得到图6所示的波形图。需指出,动态实验的测量距离为110 cm,当机器人速度增加时,由于机器人控制系统的加减速控制,并不能有效增加传感器的运动速度,所以实验的速度控制在机器人最大运动速度(约6.23 m/s)的15%之内。
图6(a)表示红外测距传感器分别以最大运动速度5%、10%、15%的速度从120 cm的高度运动到10 cm时的波形图;图6(b)表示红外测距传感器分别以最大运动速度5%、10%、15%的速度从10 cm的高度运动到120 cm时的波形图。
从波形图可以得到:
(1)在动态环境中传感器对平面障碍物具有良好的识别能力,有效测量范围内的输出电压可以用于障碍物距离的判断;
(2)传感器运动速度达到机器人最大运动速度的15%时,同样可以有效拟合出波形,则表明在运动速度较高的动态环境中,红外测距传感器可以有效测量距离平面障碍物的值。
4.2 阶梯状障碍物识别
按图1(b)所示,调节红外传感器垂直于阶梯状障碍物,控制机器人法兰在阶梯状障碍物上方某一固定高度做水平直线运动,进行阶梯状障碍物的识别,结果如图7所示。图中(a)、(b)表示红外测距传感器对高度差8.3 cm的阶梯状障碍物识别曲线图; (c)、(d) 表示红外测距传感器对高度差12.6 cm的阶梯状障碍物识别曲线图; (e)、(f)表示红外测距传感器对高度差16.5 cm的阶梯状障碍物识别曲线图。(标示中的负号表示目标位置低于初始位置;正号表示目标位置高于初始位置)
通过图7中多组数据分析可以发现:

(a)不同速度从高处往低处运动信号图
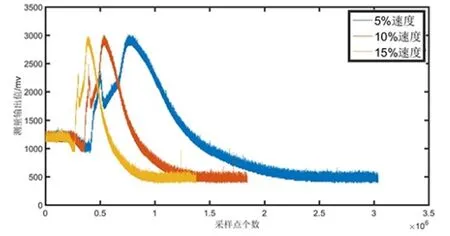
(b)不同速度从低处往高处运动信号图图6 传感器动态监测图
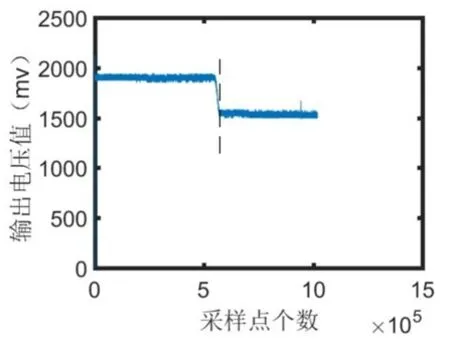
(a)-8.3 cm高度差阶梯状障碍物识别图
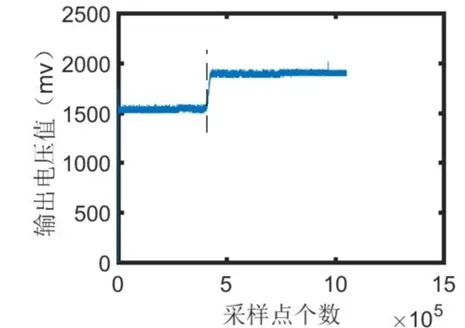
(b)+8.3 cm高度差阶梯状障碍物识别图

(c)-12.6 cm高度差阶梯状障碍物识别图

(d)+12.6 cm高度差阶梯状障碍物识别图

(e)-16.5 cm高度差阶梯状障碍物识别图
(f)+16.5 cm高度差阶梯状障碍物识别图
(1)红外测距传感器可以识别出阶梯状的障碍物,其输出信号呈阶梯状,且阶梯处的信号连接是一斜线,不是竖直的直线;
(2)随着阶梯状障碍物阶梯高度差的增加,阶梯处信号的倾斜角也有所增大;
(3)在阶梯状障碍物碍物识别过程中,传感器从低处往高处运动时,倾斜角度比从高处往低处运动的角度略大。倾斜角存在的原因是当红外测距传感器距离障碍物越远时,光束在障碍物表面所形成的光斑也就越大,则会造成发射信号接收的不稳定从而导致信号拟合时存在上述角度问题。
此外,本文还开展了速度变化对阶梯状障碍物识别能力的实验研究,通过对输出电压与障碍物测量距离进行拟合,发现速度增加后,红外测距传感器对阶梯状障碍物的识别能力有所下降。
5 结语
本文在搭建基于红外测距传感器的机器人避障硬件结构基础上,通过RC低通硬件滤波、巴特沃斯软件滤波对传感器测量信号进行处理,可以有效减小信号噪声,采用最小二乘法拟合红外测距传感器的输出电压与测量距离之间的数学模型。实验结果证实利用红外测距传感器在动态环境中可以有效辨别出平面障碍物的距离以及红外测距传感器运动速度不太高时,能有效识别出阶梯状障碍物。但当传感器运动速度高于机器人最大运动速度的5%时,对于阶梯状障碍物识别能力有所下降,在后续工作中将针对该问题进行深入相关研究。
参考文献:
[1]徐跃. 基于超声波测距的机器人定位与避障[D].济南:齐鲁工业大学,2013.
[2]付永春. 目视觉结构化道路车道线检测和跟踪技术研究[D].南京:南京理工大学,2012.
[3]Benet G, Blanes F, Simó J E, et al. Using infrared sensors for distance measurement in mobile robots [J]. Robotics & Autonomous Systems, 2009, 40(4):255-266.
[4]Mohammad T. Using Ultrasonic and Infrared Sensors for Distance Measurement[C]. World Academy of Science, Engineering and Technology. 2009:293.
[5]Paulo Malheiros, José Gon?alves and Paulo Costa. Towards a more Accurate Infrared Distance Sensor Model [J]. 2009.
[6]李钟慎. 高阶Butterworth低筒滤波电路的快速设计[J]. 西安:工业仪表与自动化装置. 2007(4):27-29.
[7]庞建丽,高丽娜. 基于Matlab的IIR数字滤波器设计方法比较及应用[J]. 西安:现代电子技术.2010(11):103-106.
[8]Hong Y, Sun R, Lin R, et al. Mopping module design and experiments of a multifunction floor cleaning robot[C]. Intelligent Control and Automation. IEEE, 2015:5097-5102.
[9]刘竞阳. 基于红外测距传感器的移动机器人路径规划系统设计[D]. 沈阳:东北大学,2012.
[10]Mustapha B, Zayegh A, Begg R K. Ultrasonic and Infrared Sensors Performance in a Wireless Obstacle Detection System[C]. International Conference on Artificial Intelligence, Modelling and Simulation. IEEE, 2014:487-492.
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
电子制作(2019年7期)2019-04-25
电子制作(2017年7期)2017-06-05
光学精密工程(2016年3期)2016-11-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10