
电动汽车测试技术综述
2018-04-09 06:18
汽车文摘 2018年4期
1 测试新的生态驾驶解决方案[1]
减少能源消耗已成为电动车日益关注的问题。主要目的是教授高效的驾驶策略,并通过多种反馈方式为驾驶员的决策过程提供便利,以帮助提高驾驶效率并降低能耗。在本研究中,将生态驾驶系统与触觉反馈油门踏板相结合,在真实驾驶条件下进行了测试,以回答关于其在电动汽车中的有效性、效率、工作量和可接受性的一些问题。
选择三十名年轻但经验丰富的司机,在开放的公路轨道上行驶,可能会遇到几种可能的情况,如弯道,交叉口或环形道,限速变化。每圈测量平均速度,主要结果表明,驾驶时获得的效率收益取决于所提供的事件类型和反馈形式。例如,触觉反馈似乎特别适用于环形交叉路口。在真实驾驶条件下测试和验证全生态驾驶系统和电动汽车触觉式油门踏板,全生态驾驶系统的视觉反馈,为节约能源提供了最佳指导,并在许多情况下提高了安全性。全生态驾驶系统视觉反馈是速度管理和能源效率最值得推荐的方式,因为它为生态驾驶策略的决策和学习过程提供了有益的帮助。以往的研究结果表明,视觉反馈比触觉反馈更有效,但增加了主观工作量,而这项研究表明,与触觉反馈相比,视觉反馈并没有增加工作量:两者同样有效。
2 电动车中镜面光伏玻璃的分体式太阳能电源的设计、建造、测试和性能研究[2]
太阳能光伏板被集成到电动汽车车顶上,为电池组充电。本文采用光伏系统实时仿真软件对电动汽车传统太阳能电源结构的性能进行了分析。传统太阳能电源的局限性是通过一种新型的镜面光伏玻璃和分体式太阳能电源结构来解决的。介绍了分离式太阳能电源的设计,制造和结构优点。使用MATLAB进行验证。随后,使用光伏系统实时模拟器来研究分离式功率太阳能源的性能。从材料要求、重置成本、耐受能力、空间利用率、功率损耗、跟踪机制的可行性和性能等方面进行了比较研究。
车顶面积和电池组电压是决定太阳能电源及其连接布局的决定性因素。车辆的空气动力学是决定电动汽车车顶太阳能电池板的主要因素。电动汽车车顶的面积为8平方米,电池板有1200 W额定功率,又分为4个小部分,每部分300W。每两个子部分串联连接以产生58V的电压,以对48V电池组进行充电。旁路二极管连接在每个太阳能电池串两端,以使故障条件下的功率损失最小化。为了阻止反向电流进入太阳能电源,在太阳能电源和电池之间设置阻塞二极管。具有低生产成本,能够承受多个热点,高温超过180℃的特点,成功解决了太阳能电池板面临的障碍。在8平方米有限的区域内将功率容量提高到1306 W,并将重置成本降至1.39美元,功率损失最小化为4.186W。
所以,通过比较研究,得出了分体式电源架构作为电动汽车最佳可行的太阳能电源设计。
3 电动汽车辅助设备远程监控系统测试方法[3]
本文开发并建立了由软件起动器和现代测控装置控制的异步电动机,远程监测和控制的实验室系统。这个实验室系统用于研究和教学。由于对相关软件产品的了解是必要的,所以对软件起动器和PLC的运行原理进行了研究。本文提出了一种测试方法,并给出了一些实验。因此,对所开发的系统进行了实验验证。
这个实验室系统为研究和实践提供了各种可能性。开发了不同测试的方法。可以检查软件起动器设置对驱动性能和能量参数修正的影响。因此已经对所描述的方法进行了实验验证。如果这种系统涉及电动汽车对辅机的远程监控,则能效和可靠性将会提高。与电机直接连接的电网相比,起动电流将减小,功率因数可以得到优化。每个特定情况下的软起动器的最佳设置必须提前完成。通过对驱动性能的实时监控,可以立即发现任何故障或损坏,控制中心的操作员可以立即关闭电机
通过安装在PC上的相关软件产品Powerconfig V3.7进行驱动控制、监视和参数追踪和捕捉。因此,这个系统提供了各种测试和研究的可能性。例如,研究启动和减速时间对传动性能的影响,综合用于驱动系统最优控制的算法,评估PLC在驱动系统中使用它的可能性,以优化效率。
4 锂离子电池老化研究:电池寿命测试和基于物理模型的电动汽车模拟[4]
论文为汽车应用的大型商业单元提供了一个广泛的寿命测试矩阵,包括日历和循环老化。构建测试矩阵来研究温度、电池以1/Xh完全放电或充电的速率。研究充电状态(SOC)水平、测试程序和放电深度(DOD)。构建了包括固体电解质膜SEI形成、膜电阻增加和电极体积分数损失(作为循环次数的函数)的物理模型,通过使用校准实验参数化模型来确定老化参数。
寿命周期测试的结果显示了90%的DOD预期温度依赖性,更高的温度使电池更快地老化,而10%的DOD则获得了不同且有趣的观察结果。在SOC最大值低于50%的情况下,温度依赖性几乎没有影响。只有在高于40℃的温度下,预期的温度依赖性首先可以在50%以上的SOC上观察到。当比较Hyzem Rural驾驶循环时,与完全放电的RMS(Root Mean Square)电流的CC(常电流)周期相比,终身循环测试结果显示Hyzem Rural驾驶循环无害。该研究还证实,在高SOC水平下运行导致更快的老化;在低SOC间隔时间内只能观察到适度的老化,而SOC间隔高于40%的SOC则更快速地老化。对于60%以上的SOC和没有大的差异。在低SOC间隔时间内的几个10%DOD测试显示初始容量下降,然后恢复并稳定容量,因此总体上仅经历最小的老化。
5 实验室电动汽车动力系统的设计[5]
本文开发实验室动力总成系统,这是一系列电动车辆的典型特征。该系统由电动车辆动力传动系统的典型部件组成,包括电池组、电池管理系统(BMS)、电机以及类似于现有电动车辆上常见的规格的控制器。该系统被安装到设备车上,并提供对主要和次要部件的可视访问。本文介绍了实验室系统的设计、建造和测试。设计过程采用自下而上的方法,包括组装电池组、整合BMS来调节电池组,整合系统级控制器来管理车辆功能并驱动电动机。项目成果包括系统设计文件、系统原理图、以及从实验室系统进行充电和放电测试获得的数据。
电池系统和BMS位于底部,电机控制器和电机位于中间架子上,为了防止高压短路和操作系统人员的伤害,在电池组上方有一个透明的塑料盖,作为预防措施。BMS也直接位于电池系统盖上,它已经被配置为与电池组密切相关以保持模块化。为了调节目的,BMS需要与电池组一起工作,因此必须紧密安装,以便在需要时可以从测试装置中取出。测试装置的12V辅助部件位于测试装置车的顶部。连接在主电池组的负端子和主接触器的正端子之间的72V-12VDCDC转换器向所有12V组件供电。当BMS和控制器允许电池系统放电时,主接触器闭合,从而为12V组件供电。这些组件包括前照灯,转向指示灯和车辆喇叭,以演示如何连接电动车辆上常见的几个主要12V辅助部件。
6 使用AVL CRUISE软件在新的测试循环中仿真电动车辆模型[6]
在本文中,将在AVL Cruise软件中创建电动汽车模型。与真实车辆不同,所提出的模型具有不同的特性,因为它是全电动车辆。该车辆只有一个电池,该模型将被模拟,以获得关于新的WLTC测试周期中的车辆性能,能量消耗和范围的数据。所获得的技术诀窍将有助于电动模型的后续改进,从而在新的WLTC测试周期中增加车辆的行驶距离。
这辆车被选为基础车型,因为它是一款可容纳五名乘客的低成本车辆。它还为电气设备提供了足够的空间;转换后,乘客的空间不受影响。在去除了汽油动力总成(发动机,变速箱,燃油系统和排气)特有的所有元件后,安装了电动推进部件。液冷式电机由瑞士MES-DEA制造,具有正常和升压两种运行模式。在正常模式下,在2850-9000转/分之间,最大输出功率为18kW(24.5HP),在2850转/分时最大扭矩为90N·m。在升压模式(短时间)内,最大功率输出为31kW(42 HP),在2850-9000转/分之间,在1400转/分时最大扭矩为160N·m。传动装置具有固定的减速比并具有用于停车的换档锁。电动机的电子管理单元是TIM 400(牵引逆变器模块),由电机制造商生产,它是专门为电动和混合动力车辆设计的。电池组的标准电压为205V,最小电压为179V,最大电压为256V。
在AVL Cruise的帮助下使用计算机模拟提供了许多优点,例如减少车辆开发的时间和成本,它有助于在整个过程的任何阶段完善模型。与其他电动汽车相比,获得的结果显示出相对较小的范围,但是测试条件苛刻:全负载车辆和严重的短暂状态。由于范围很小,所以这种车型显然适用于通勤或城市驾驶。它不适合在高速公路上行驶,所呈现的模型显示了电动车辆的能量消耗,并且可以在之后确定范围。获得的结果将有助于电动模型的后续改进,例如通过使用更高容量的电池或空气动力学改进来增加续驶里程的方法。
7 四轮驱动汽车(4WDEV)的质子交换膜燃料电池在不同工况下的行为[7]
带电池的电动车辆的供应受限于充电状态(SOC)和所使用的电池技术的类型。为了克服在多种速度和道路拓扑条件下能量变化的问题,将质子交换膜燃料电池(PEMFC)作为能源管理的最佳解决方案。在本文中,作者着重介绍了基于直接扭矩控制的、空间矢量调制(SVM-DTC)控制的4WDEV的PEMFC行为,控制策略图见图1,控制系统见图2。所提出的控制器法则对于电力牵引系统是非常合适的。为了测试PEMFC的性能,作者对4WDEV进行了几次测试。提出了基于空间矢量调制(SVM-DTC)的直接转矩控制方法。在MATLAB/Simulink下得到的结果令人满意。DTC-SVM法在几种情景考虑下增加了4WDEV自主驾驶的效果。而且,未来的工业车辆必须将所得到的结果纳入设计过程中。
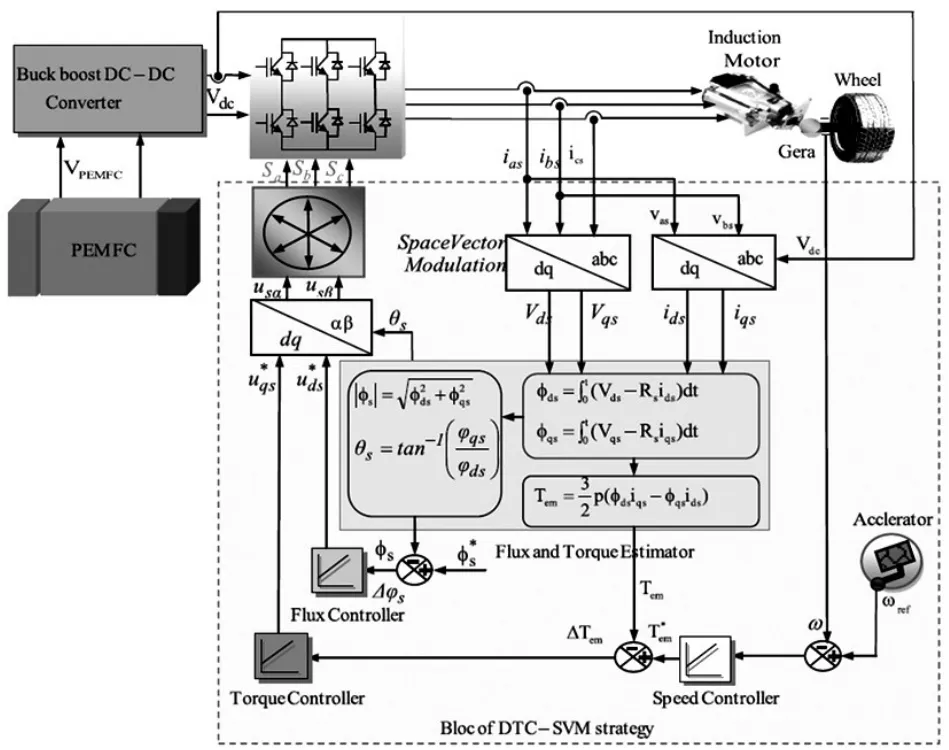
图1 SVM-DTC控制策略图

图2 驱动轮控制系统
它分为两个阶段,第一阶段是在各种高级策略下进行DTC-SVM控制的4WDEV的性能测试,第二阶段是PEM在五个阶段的驾驶行为。本文研究的拓扑结构由五个阶段组成(图3):
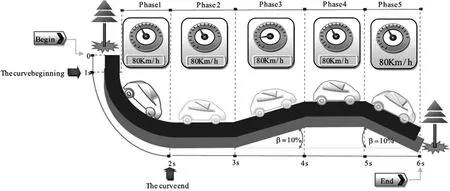
图3 特定路驾驶拓扑图
第一阶段:曲线道路上行驶,速度为80 km/h
第二阶段:为直线道路,速度为80 km/h
第三阶段:4WDEV在10%以下的斜坡道路上向上移动,速度为80 km/h
第四阶段:车辆在直路上行驶,
最终:车辆在不改变参考速度的情况下在逆坡道路上行驶。
本文概述的车辆能量策略已经证明,4WDEV的降压DC-DC变换器控制的PEMFC行为,可以通过基于空间矢量调制的直接扭矩控制策略来改善,可以预测不同道路拓扑条件下的PEMFC动态行为,为4WDEV的控制和功率管理奠定基础。
8 混合动力和电动汽车动力传动系试验台的设计与试验[8]
本文提出了一种半公交车的试验台,能够重现驾驶过程中驾驶的实际工况。测试台能够通过适当地指令负载发生器/电机驱动来模拟斜坡、附着条件、天气条件。介绍了实时数据采集和控制平台中实现的测试平台架构和软件,电动客车的传动系统使用所提出的测试台进行测试。结果比较了所选传动系统在不同路面/车轮附着条件下电动客车的性能。
测试台允许在不同的粘附条件、坡度和驾驶周期条件下测试各种传动系统,测试平台由一个硬件部分和一个软件部分组成。
硬件部分包括:
a)要测试的全电动/混合动力传动系,传动系统通过悬挂系统和减速器与车轮连接。
b)道路/车轮仿真系统由以下部分组成:
·滚筒
·减速器
·负载发生器/电机
c)数据采集和控制系统,包括:
·一个dSPACE实时控制和数据采集平台
·信号调理和电路。
连接到负载发生器/电机的滚筒系统被驱动以模拟路面在轮面上的反作用。负载的参考信号是实时控制和数据采集系统的输出。该软件实现了车辆的动力学模型和道路/车轮的相互作用。试验台已被用于验证电动公交车的传动系统的性能。
[1]Jaume R.Perelló.Testing New Solutions for Eco-Driving:
Haptic Gas Pedals in Electric Vehicles[J].Journal of Transportation Technologies,2017,7(1):1-25.
[2]R.Maruthi Prasad.Design,construction,testing and performance of split power solar source using mirror photovoltaic glass for electric vehicles[J].Energy,2017,145:374-387.
[3]Vasil Dimitrov.Methodology for testing a system for remote monitoring and control on auxiliary machines in electric vehicles[J].MATEC Web of Conferences 133,08001(2017).
[4]Evelina Wikner.Lithium ion Battery Aging:Battery Lifetime Testing and Physics-based Modeling for Electric Vehicle Applications[D].Division of Electric Power Engineering.Department of Electrical Engineering CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg,Sweden 2017.
[5]Kevin Benecki.Design of a Laboratory Electric Vehicle Powertrain System[J].Systems&Information Engineering Design Symposium,2017:44-49.
[6]Constantin Cristian CIOROIANU.Simulation of an electric vehicle model on the new WLTC test cycle using AVL CRUISE software[J].Materials Science and Engineering 252(2017)012-060.
[7]Brahim Gasbaoui.Behavior PEM fuel cell for 4WD electric vehicle under different scenario consideration[J].International Journal of Hydrogen Energy,2017,42(1).
[8]Fabrizio Marignetti.Design and Experiments of A Test Equipment for Hybrid and Electric Vehicle Drivetrains[J].Ecological Vehicles and Renewable Energies(EVER),2017:1-6.
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年19期)2022-10-19
车迷(2022年3期)2022-08-01
汽车实用技术(2022年12期)2022-07-05
北京理工大学学报(2022年6期)2022-06-14
小读者(2021年2期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
汽车维修与保养(2020年11期)2020-06-09
科技知识动漫(2017年7期)2017-08-09
海外星云(2016年17期)2016-12-01
