潜水救捞发展现状与展望*
——第四届国际潜水救捞与海洋工程技术论坛综述
2018-04-08 03:26:00陈德山严新平
交通信息与安全 2018年1期
陈德山 黄 明▲ 严新平
(1.武汉理工大学智能交通系统研究中心 武汉 430063;2.武汉理工大学国家水运安全工程技术研究中心 武汉 430063)
0 引 言
潜水打捞是国家应急保障体系的重要组成部分,也是国家应对海上重特大突发事件的中坚力量。在“一带一路”建设与“海洋强国”“海运强国”等国家战略的指引下,我国海洋经济持续快速发展,海上交通运输和海洋资源开发活动日益活跃,船舶、飞机和人员在海上活动的数量、密度不断加大。潜水打捞作为服务于国家海洋强国战略的重要力量之一,在海洋石油资源开发、船舶工业发展、海洋工程服务、临港码头航道建设、航海保驾护航、水电大坝维护、应急救助打捞等领域起了重要的作用[1-2]。
我国是海洋大国和航运大国。从水运条件方面看,中国海岸线长达1.8万多km,海域广阔,同时还有5 800多条天然河流和900多个大小湖泊,资源十分优越;从海洋经济方面看,各种涉海、用海活动呈现持续增多的趋势,涉及海洋渔业、海洋油气业、海洋交通运输业等多种海洋产业经济。根据《2016年中国海洋经济统计公报》,2016年全国海洋生产总值70 507亿元,比2015年增长6.8%,海洋生产总值占国内生产总值的9.5%。2016年全国涉海就业人员3 624万人。2017年前三季度海洋经济运行情况。初步估算,前三季度,全国海洋生产总值5.5万亿元,同比增长6.9%,与上半年基本持平。1—8月份,与海上丝绸之路沿线国家海运贸易总额同比增长12.7%;从水上交通方面看,我国拥有世界第三大的海运船队运力,占据全球40%的注册海员,具有世界海运总量1/3的外贸海运。我国具备强大的港口生产能力,其中,港口货物进出口、集装箱进出口总量已经超过10年连续位列世界第一,我国也连续成为IMO的A类理事国14次[3]。
近年来,中国救捞在装备技术、专业队伍和管理体制等多个方面均取得了高速发展,已经成为世界上整体实力最强的专业救助打捞力量之一。据统计,自2003年中国救捞新的体制建立以来至2014年10月,救助遇险人员39 430名,救助遇险船舶2 173艘,抢险打捞船舶106艘[4]。近年来,救捞任务依然十分严峻,仅2016年1年中就有1 388次抢险救援行动在救助系统执行,总计1 949次派遣专业救捞力量;共1 996人次得到救援(包括192名外籍人员);有167艘遇险船舶得到救助(含外籍船舶9艘),获得约55.2亿元的经济价值;成功打捞沉船14艘;成功搜寻打捞罹难者遗体190具[5]。
尽管我国的救捞力量取得了快速发展,然而相比于其他发达国家,我国的救捞装备技术水平上仍存在一定的差距,救捞装备力量还不能适应我国迅速发展的海上经济活动的需求。加强救助打捞体系建设和装备技术研究,是提高救助打捞综合能力的根本,是国家发展战略的重要组成。《公路水路交通中长期科技发展规划纲要(2006—2020)》和交通运输部出台《关于加强救助打捞工作的意见》均提出了应急救助和抢险打捞装备关键技术研究的发展要求和规划方向,建设国际一流的现代化专业救助打捞体系。2017年1月,国务院办公厅关于印发《国家突发事件应急体系建设“十三五”规划的通知》,指出加强水上应急救助和抢险打捞能力建设和加快国家海上溢油应急能力建设的要求。如何从服务国家战略和行业发展需求的全局视角,审视潜水打捞发展现状,展望未来发展趋势,科学谋划,具有深远的战略意义和现实意义。
第四届潜水救捞与海洋工程技术论坛在此背景下召开。笔者首先对论坛的发展历程做一个简要的梳理,通过总结本次行业技术论坛报告内容,简要梳理我国救捞体系力量的发展历程与现状,并结合国家发展战略,探讨了潜水救捞的发展趋势,分析了该领域的未来研究方向。
1 论坛概况
中国潜水打捞行业协会2017年年会暨第四届潜水救捞与海洋工程技术论坛于2017年11月3日—5日在厦门召开。此次会议由中国潜水打捞行业协会主办,并与美国国际潜水承包商协会和英国国际海事承包商协会联合主办了装备展览会。中国潜水打捞行业协会属国家一级协会,协会不以盈利为目的,由全国从事潜水、打捞、救助、水下施工、海洋工程服务等具有从业资质的企事业单位及相关医学保障、装备装具制造、科研、教学培训等机构自主构成。目前拥有正式单位会员420余家,其中以企业会员为主,同时也包括大连海事大学和武汉理工大学等拥有水上交通学科的高等院校的积极参与,旨在助推中国救捞事业的发展与交流。
本次论坛和展览会涵盖了潜水、打捞、救助、水下作业,以及海洋工程装备技术研究、生产制造和应用等诸多领域。参展单位包括中国交通建设股份有限公司、交通运输部救助打捞局、中国船舶工业集团公司、中国船舶重工集团公司在内的60余家单位,分别展示了各自的前沿技术与装备。技术论坛分为高峰论坛、海洋工程分论坛、潜水打捞分论坛和专题论坛4个部分,专家报告数量多、内容前沿且涵盖面广,吸引了来自国内外的大量专家、学者参会。
2 论坛报告总结
第四届潜水救捞与海洋工程技术论坛报告情况见表1。针对论坛的主要报告内容[3],将其归纳为战略展望、救捞实例、技术装备和法律法规4个方面进行梳理和总结。
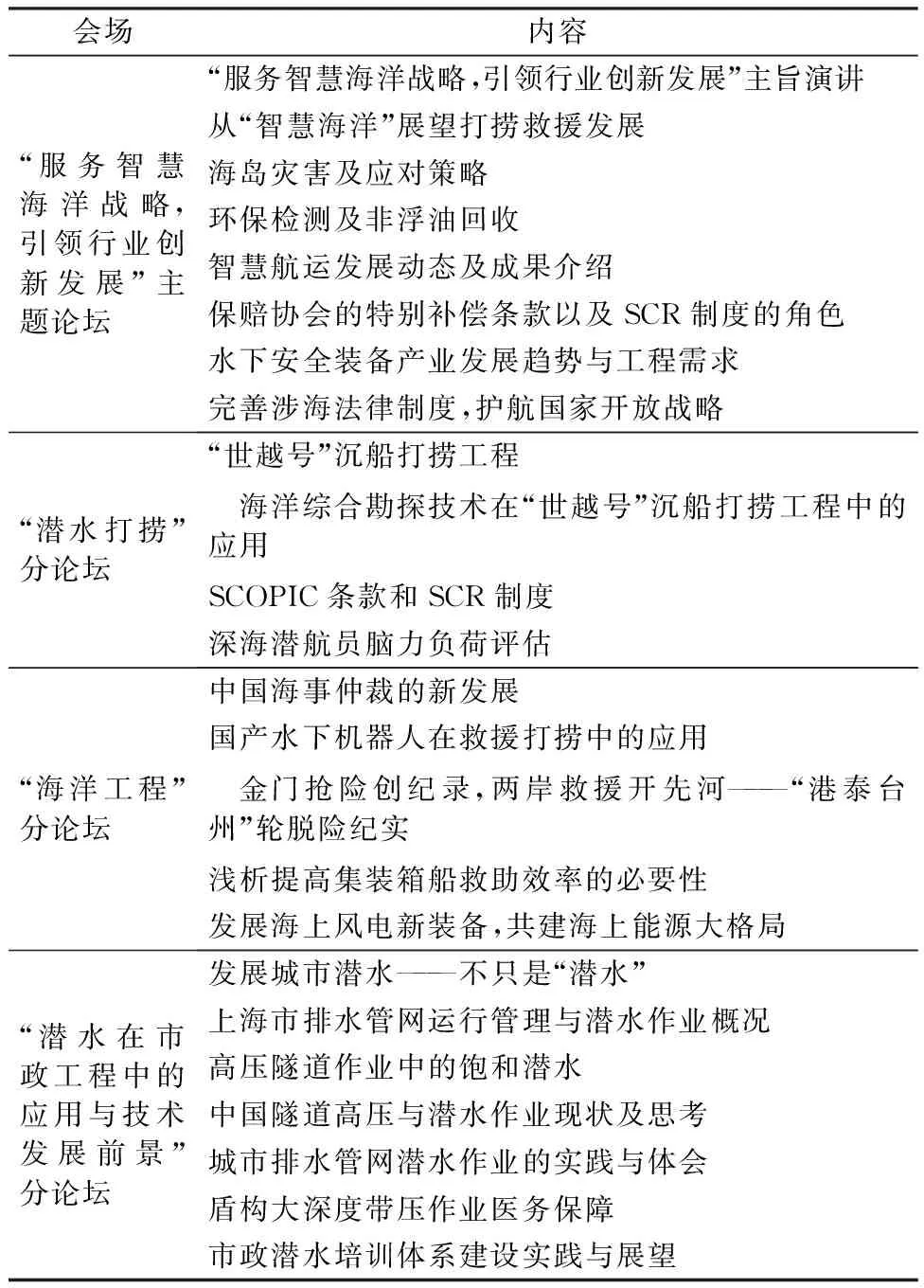
表1 第四届潜水救捞与海洋工程技术论坛报告情况Tab.1 Reports of 4th International Symposium on Underwater Operations and Off-shore Industry
2.1 战略展望
在战略展望方面,主要讨论了海洋强国战略为潜水打捞带来的机遇和挑战。自党的十八大以来,“一带一路”建设为我国从海运、港口、海洋、造船和渔业大国走向强国带来千载难逢的良机。当前,我国海洋事业蓬勃发展,已成为发展中国家里海洋事业发展最快的国家。大量的海洋活动带来了巨大的海洋活动需求,“智慧海洋”正是为了解决巨量海洋信息的整合问题而提出的。所谓“智慧海洋”就是通过信息技术整合各类信息应用系统,包括军用信息系统、海上管控信息系统、公共信息平台和各相关行业应用系统等,实现军事、管控和开发等各个层面的互通和联动,进而形成“三位一体”的格局。智慧海洋是信息化与海洋工业的深度跨界融合结,是海洋形态海洋活动相结合,是海洋工业化的深度跨界融合,是对发展成熟的陆地智慧产业的资源整合,并将其扩展至海洋领域。中国潜水打捞行业协会理事长赵长松指出:近年来受全球市场和国际形势的影响,航运、海工、石油市场相继走低,海洋石油市场价格与开发成本倒挂,船舶订单量下降,国际海洋开发热度降低,与潜水打捞行业密切相关的几大领域均受到不同程度的冲击,行业发展亟须找到新的增长点,积极创新,再创辉煌。海洋强国战略的提出,特别是基于信息需求构建智慧海洋工程的推进,给潜水打捞行业提供了广阔的合作舞台。科技创新是提高社会生产力和综合国力的战略支撑,潜水打捞行业要想在服务建设国家强国战略中有所作为,就需要高度重视科技创新的作用,共同探索行业需求,凝聚行业发展共识,坚持科技创新引领行业发展,服务智慧海洋建设,走一条创建平安海洋、清洁海洋、和谐海洋的行业发展之路。中国船舶工业系统工程研究院体系工程创新中心执行主任何中文从“智慧海洋”的体系架构、重点任务和发展影响等方面进行详细阐述。指出“信息主导”是由海洋大、分、散、变的固有特点决定的。大指的是海洋面积辽阔,空间立体;分指的是海洋分近海、远海,有领海、专属经济区、公海之分,经营战略各异;散指的是船只、飞机等活动主体高度分散,且处于不断运动之中;变指的是的海洋气象、海洋主体、海洋活动都是复杂多变的。智慧海洋工程的重点任务在于增强综合感知能力、提高信息通信能力、强化分析处理能力、拓展智能应用能力、构建运维服务体系、壮大技术装备体系、健全标准质量体系、完善信息安全体系8个方面。此外,他还指出:智慧海洋工程的发展必将为多项产业领域带来新的市场和机遇,同时将引来更多更广的应用前景。
2.2 救捞实例
在救捞实例方面,不同的救捞行业单位展现了具有代表性和影响力的救捞实况及其技术和经验的总结。交通运输部上海打捞局刘雨工程师对“世越号”沉船打捞工程的技术背景及特点、技术方案及实施过程进行全面的介绍。“世越号”整体打捞吨位和打捞难度均属于世界前列的大型综合打捞工程,为了满足韩国方面提出的“三不”要求,即不使船舶沉没姿态受到改变、不使船体结构受到破坏、船舶内遗体不得流失,最大程度的保护遇难者遗骸,进行事故原因调查,不能采用沉船扳正后在起吊出水这一常规整体打捞方式,而是开创性地提出并成功应用了“钢梁托底+全面封网”的整体抬吊打捞方案。打捞方案大体上可以划分为4个步骤:沉船预调查及抽油任务、船艏抬吊及托底钢梁安装、双驳船抬吊及起浮、滚装上岸。工程中的技术难度极大,期间开发并应用了多项新技术和新工艺,主要包括:采用有针对性的吸头进行抽油作业、安装防流失安全围网、使用内置助浮打捞气囊、外置橡胶浮筒、架设托底钢梁、选取水下开沟犁、使用带升沉补偿装置的液压系统、应用SPMT方法将船舶整体滚卸上岸等。“世越号”沉船打捞工程历时600多d,参与打捞任务的船舶超过3 400艘,参与作业人员共计2 170人,成功作业6 000余次,水下作业总时间近13 000 h,是一项截至目前为止由上海打捞局执行的最困难、历时最久、耗费最大、参与的船舶设备最多、人力资源消耗最大的一次作业。此次任务的圆满完成,证明了我国在打捞水平上的国际竞争力,展现了我国救捞形象和国家实力。正力海洋工程公司陈瑞喜总经理介绍了“港泰台州”救援实况。原本停泊在厦门海域的4万多t的大型集装箱船“港泰台州”轮受17级超强台风“莫兰蒂”及天文大潮影响被“吹”至金门,搁浅于金门古岗外海海域的礁群上,船体受到浪潮的冲击剧烈摇晃,使船底不停与礁石碰撞,导致船舶受损,船体多处破裂;猛烈的撞击使得二层底板全部损坏,导致海水涌入机舱及部分货舱,船体随时面临断裂及机舱油污大面积扩散的威胁。“正力海工”连续开展了30多个昼夜的艰苦奋战,总计动用1艘大型浮吊船、3艘工程船和3艘拖船。最终“港泰台州”轮在2 200 t级大吊船的协助下,趁着大潮终于成功脱离搁浅的礁岩区,移往约13 m深的安全水域。满洋公司总工程师梁兴高以“鸿源02”轮救援为例,探讨了集装箱船的应急救援的关键因素。2016年12月15日23:00左右,宁波籍集装箱船“鸿源02”轮触礁,导致船体破损进水,面临集装箱落水和船体完全沉没的危险。总结的关键因素包括:应急抢险过程中响应速度快,采取措施及时有效,控制了事故现场态势;资源整合有效,现场管理有序,作业过程中调配了21艘船舶,使用了潜水设备、应急发动机组、水泵等大量设备物资,出动各类专业人员共计13 508人次;施救方案科学合理,通过克服各种难题,最终将遇险船上的660个集装箱全部卸载,并采取对货仓排水和艉部左右两舷抛锚固定等系列措施有效的保全了机舱,排除了沉没风险;强有力的配套力量,抢险中除设立了指挥部,还配有潜水组、清污组、装卸组等多方力量密切配合,最终有效避免了油污泄露,高效、及时地完成了救助。
2.3 技术装备
在技术装备方面,天津水运工程勘察院杨鲲副院长介绍了“世越号”打捞过程中的综合勘探技术。他指出打捞工程的各个阶段都离不开有效全面的感知与观测,主要包括水下高精度三维重构系统、沉船姿态检测集成系统、导航定位网络及遥控指挥系统、实时打捞导航定位三维可视系统、多要素海洋环境及导航定位综合系统。为获取“世越号”在水下的高精度几何形和沉船状姿态,采用了融合多源传感器多次测量的方式,完成水下沉船的高精度三维重构。在船艏起吊和整体抬吊过程中,通过倾斜仪、光纤罗经、超短基线、DGPS等多种技术手段,实现了对沉船和钢梁的位置及姿态数据的实时监控,并将船舶姿态和关键数据通过仿真可视化的手段实时显示在监控器上,为方便作业人员对起吊作业进行有效及时的控制和调整发挥了重要作用。天津深之蓝海洋设备科技有限公司技术支持部经理朱程介绍了白鲨MAX、白鲨MIN等多个国产水下机器人,以及它们在水下搜寻中的应用,包括潘家口水库搜寻遇难潜水员的工作等。中国交通建设股份有限公司港航疏浚事业部副总经济师景奉韬指出:气候变暖是导致海岛极端气候增多的首要因素,全球气温上升导致冰川融化,淡水的注入改变海洋循环系统的平衡,进而使强降水、风暴、雷电、干旱、冰雪等极端天气气候事件发生的频率和强度都有所增强。从基础设施建设、灾害预警和灾害紧急救援3个方面介绍了海岛灾害的应对措施。应对海岛灾害基础设施建设包括海岛防波堤建设、海岛护岸建设、吹填造陆工程、蓄淡避咸工程、海水淡化工程、防洪排涝工程、沿岸防护林体系建设与防雷工程;灾害预警包括气象预警、防灾监测系统、防灾教育和演练;灾害紧急救援包括构建放在救援队和移动式救援平台、灾害医疗防御和紧急预案编制。美国打捞协会副主席介绍了水下非浮油的探测和回收的主要流程和业务。此外展会上也带来多项新的技术和装备,包括:中国海洋工程有限公司的分体式空化磨料水射流冷切割装置,其优点在于作业过程中无明显温度变化,无火花、明火、静电产生,提高了一些特定危险领域的和环境的作业安全;充气式橡胶打捞浮筒,相比于钢质浮筒,其优点在重量轻、占用体积小,运输移动方便,维护费用低等优点。
2.4 法律法规
在法律法规方面,随着时代的进步和社会的发展,行业对救助打捞相关的法律法规问题进行相关的了解和探究的需求越来越强,制定和完善一部能够准确、科学和规范调整我国打捞行业的法规,是我国经济建设的需要,也是我国法制建设的需要。本届论坛专门邀请了中国社会科学院国际法研究所张文广副研究员做了“救捞法律框架与典型案例评析”的报告,受到许多参会人员,特别是救捞企业单位的青睐。报告中讲解了目前救助打捞相关的法律框架,包括:国际公约、法律、行政法规、司法解释。相关的国际公约有1979年《国际海上搜寻和救助公约》、1989年《国际救助公约》和2007年《内罗毕国际船舶残骸清除公约》(仅适用于专属经济区的残骸清除,而不适用于内水或领海的残骸清除,但残骸既包括船舶,也包括船载货物和船上其他物品)。适用的法律有《海商法》《海上交通安全法》和《海洋环境保护法》。行政法规主要有关于《外商参与打捞中国沿海水域沉船沉物管理办法(2016)》《内河交通安全管理条例(2017)》《防治船舶污染海洋环境管理条例(2017)》。司法解释依据关于审理船舶碰撞和触碰案件财产损害赔偿的规定、关于审理船舶碰撞纠纷案件若干问题的规定、关于审理海事赔偿责任限制相关纠纷案件的若干规定、关于审理船舶油污损害赔偿纠纷案件若干问题的规定。报告以“加百利”案为典型案例,进行了详细的介绍和评析,指出虽然雇佣救助属于海难救助合同的一种;《救助公约》和《海商法》所规定的“无效果无报酬”救助合同与雇佣救助合同在性质上并不等同;只要不违反强制性法律规范,就优先适用雇佣救助合同中约定的条例,这是合同自由原则和海难救助自愿原则的体现。此外,报告还指出,社会各界已经达成有必要修订《海商法》的共识,建立完善的涉海法律体系的需求已经十分迫切。中国不仅要吸收和借鉴国际上先进做法,还要包纳进自己的实践经验,最终呈现能被世界所认可的“中国经验”“中国规则”。
3 我国救捞力量发展历程与现状
新中国成立后救捞发展历程可以分为3个阶段[4]。第一阶段(1951年8月24日—1973年10月9日)为起步建设阶段。该阶段历经22载,1951年8月24日经国务院批准,中国人民打捞公司在上海成立,这是一个全国性的打捞公司。起步建设阶段结束于1973年10月9日前夜,希腊籍货船“波罗的海克列夫”号在福建沿海遇险。1953年中国人民打捞公司更名为交通部航务工程总局打捞公司,后于1956年1月和10月先后确立为交通部航务工程总局打捞工程局、上海打捞工程局。当时设备、人力资源极度匮乏,即使在这种条件下,上海打捞局完成了许多任务。1963年,上海打捞工程局更名为上海海难救助打捞局。
第二阶段(1973年10月—2003年6月28日)为发展巩固阶段。该阶段共计近30个年头,始于起步建设阶段结束的标志性事件——“波罗的海克列夫”号遇险事件,结束于2003年6月28日交通救捞体制改革。1973年底,全国海上安全指挥部在国务院、中央军委的批准下成立。从此海上的防台风、防污染、防破冻冰及海难救助工作(“三防一助”)由全国海上安全指挥部指挥和监督。1974年,广州、烟台海难救助打捞局由交通部筹建,业务工作归属交通部。1978年,交通部海难救助打捞局成立。作为全国专业救捞业务管理机构,交通部海难救助打捞局下设烟台、上海、广州救捞局,集中式的结构使全国救捞力量得到统一,便于救捞资源的高效利用,救捞网络孕育而生,范围包含全国沿海水域。其后,“保证救助、广开门路、多种经营”的12字工作方针由交通部党组于1982年提出。“保证救助”是救捞系统的核心任务。自此,专业救助队伍不断壮大,救援装备更加先进,救援系统建设不断加强,从秦皇岛到三亚共设立17个救助站点。
第三阶段(2003年6月28日至今)为快速发展阶段。该阶段在我国救捞力量发展历程中举足轻重。2003年6月28日,经国务院批准的救捞体制改革工作在救捞系统中成功开展。救助、打捞的分开管理成功实现,救助与打捞的事业单位性质得以确定,救捞系统统一领导、垂直领导的管理方式愈加明晰,见图1。中国救捞形成了3个“三位一体”的特色模式,队伍建制中救助队伍、打捞队伍、飞行队伍三位一体;岗位职责集人命救助、环境救助、财产救助三位一体;综合功能集空中立体救助、水面快速反应、水下潜水打捞三位一体。该模式具有鲜明的中国特色,在国际海上应急救援领域中独树一帜。我国海上专业救捞力量部署图见图2。
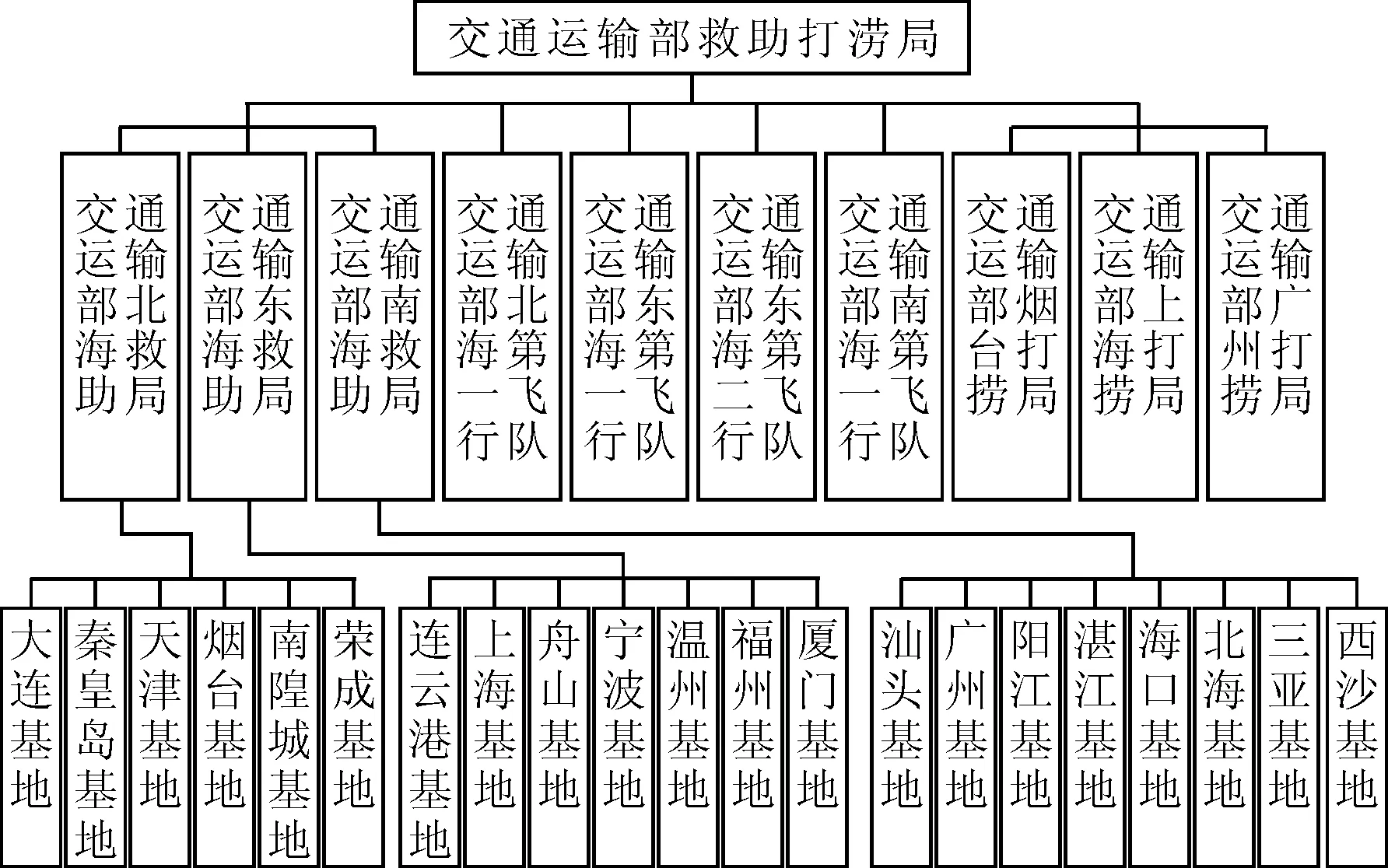
图1 救捞系统机构设置Fig.1 Institutions of salvage system

图2 我国海上专业救捞力量部署图Fig.2 Maritime professional salvage force deployment diagram in China
自中国救捞新的体制建立以来,正在不断加强救捞专业人才、装备、技术建设,不断提升救捞综合实力和运行效率,已经在人命救助、环境救助、财产救助多个方面发挥越来越重要的作用,并圆满完成了很多特殊任务。
4 发展趋势与研究展望
建设高水平的国家专业救助打捞能力是国家战略需求,“十三五”时期是救捞系统深入贯彻落实“五大发展理念”的关键期,也是加快发展步伐、再上新台阶的机遇期。全国交通运输工作会议强调,“着力推进智慧绿色平安交通建设,强化海上溢油、水上搜救打捞等重点领域应急能力建设”,“提高溢油应急处置、救助打捞和深海远洋搜救与航海保障能力”。救捞系统要以国际视野、全局高度和战略思维来统筹谋划,努力完成“十三五”建设任务、实现“十三五”发展目标。重点任务是:到2020年,在我国管辖海域基本建立全方位覆盖、高海况运行、配置科学、反应迅速、处置高效的国际一流现代化救助打捞体系,具备快速高效应对群体性人命遇险、大规模溢油和危化品污染、大吨位沉船等重特大突发事件能力,具备深海远洋救助打捞能力,具备参与国际海上重特大突发事件处置能力。为对接国家战略,顺应新的发展形势和需求,大吨位打捞船舶设计及其装备智能集成、水下高精度探测、大深度潜水、水下潜航器、仿真演练与辅助决策、水下作业工具与信息化技术等关键技术与装备势必迎来新的挑战和发展机遇。
4.1 大吨位打捞船舶设计与装备智能集成
船舶不断大型化发展,“一船沉没、全港瘫痪”的风险越来越大,向我国大吨位沉船打捞能力提出了严峻挑战。打捞工程船是沉船打捞工程施工平台,主要包括浮吊船、潜水支持母船、半潜驳船等,浮吊船是其中最主要的船型[7]。当前,我国海上最大的打捞起重工程船是40 000 kN吊力全回转浮吊船“华天龙”号,见图3,以长江为代表的内河上最大的专业应急抢险起重船是10 000 kN“长天龙”号,见图4。

图3 “华天龙”号Fig.3 “Hua Tian Long”

图4 “长天龙”号Fig.4 “Chang Tian Long”
面向海上和内河的大吨位打捞及水上工程作业的需求,浮吊船的主要发展趋势包括有:①浮吊船不断向大型化方向发展,并具有起重能力强,吊高大的特点[8-9];②作业范围不断加大,如在海上具有抗风浪能力强,适应恶劣海况等特点,而在内陆河上,船舶总体设计还将受到如水深、船闸、桥梁等通航条件的约束;③新的动力装置,如无轴推进技术、电力推动技术等,促进打捞船更加安全、环保、节能;④装备集成智能化,如作业装备的信息化集成管理与接口技术、装备运行状态智能监控技术等。
4.2 水下高精度探测
水下目标的探测定位、状态观察锁定工作是一切水下救助打捞工作的基础[10-11]。水下环境是一个相比陆地环境包括空间环境更为复杂的世界,其基本的水下能见度、电磁衰减、水流、压差4个要素就决定了水下工作的难度[12-15],而水下目标的探测完全被前2个要素所限制,从救捞角度讲作业的成败,效率、效果的好坏,很大程度上取决于目标的探测和水下观察。水下全面高精度感知贯穿整个水下救捞过程。事前预调查主要包括救捞水域扫测、水下地质状况、水文条件、沉船姿态、船体内外破损状况等。事中监测主要包括水流、水位等水下作业要素的感知与预测,起吊过程中关键目标的位置姿态及其他关键数据的高精度实时监控等。此外,打捞结束以后,通常还需要对相关水域作复查。面向复杂动态的水下环境全面、高精度探测需求,主要的发展方向包括有:基于多平台多传感器融合的水下高精度三维重构;高精度水下定位技术;水下综合观测智能化集成平台等。
4.3 大深度饱和潜水
随着潜水深度的加深、水下作业时间的延长,潜水员在水中的作业效率会不断降低[16-17]。因此,为了提高潜水作业效率,完成水下复杂的作业任务,将采取饱和潜水技术。虽然国际上在20世纪50年代开始饱和潜水技术研究,我国到70年代才开始进行,时间虽然比较短,但是进展迅速。通过30余年的努力,在我国军队和地方潜水单位,建立了系列饱和潜水设备,包括实验室模拟饱和潜水设备、船用饱和潜水设备及其相关的配套器材(见图5),保障了饱和潜水的研究、训练和作业。饱和潜水为大深度潜水作业的主要方式,未来主要的发展趋势包括有:建设模块化饱和潜水设备,可以在多种平台上安装使用,提高设备的机动性和灵活性,进而提高设备的利用效率和降低设备维护费用;加强饱和潜水技术培训,培养与设备匹配的饱和潜水潜水员、设备保障人员和医学保障人员;加强对无创性高压环境下监护手段的探索,保障对潜水员的监护主要是生命体征检测,以提高饱和潜水的安全性等。

图5 交通运输部救助打捞局300 m饱和潜水装备Fig.5 300 m saturation diving equipment in China Rescue and Salvage of Ministry of Transport of the Prople′s Republic of China
4.4 水下潜航器
超大深度潜水打捞技术与装备是打捞领域发展的重点方向之一。水下潜航器作为超大深度水下救捞的重要装备,近年来得到广泛的关注和快速的发展。水下潜航器根据是否载人,分为载人潜航器和无人潜航器两大类。由于救生钟无自航能力及作业能力,在这里不作为水下潜航器的类别。载人潜航器通常由潜航员观察外部环境,做出航行和作业决策,有利于处理各种复杂问题,但是存在人命安全问题。无人航行器(又名水下机器人)根据有无缆线连接被分为有缆、无缆两类。有缆水下机器人,或遥控水下机器人(remotely operated vehicle,ROV)通常需要连接缆线,由母船提供动力并有操作人员远程操控。由于人员的参与,可以完成部分水下复杂任务,但是缆线的存在限制了作业的范围和工作的效率。无缆水下机器人,或自治水下机器人(autonomous underwater vehicle,AUV),借助自主的感知、控制和决策系统,完成人们赋予的工作任务[18-20]。
尽管我国在水下潜航器方面的研究相比于发达国家起步较晚,但近年来取得了迅速的发展,体现在诸如蛟龙号载人潜水器等水下潜航器上。“蛟龙号”具有开创性,以勘探、海底作业为目的,由中国自主设计、自主集成研制,长、宽、高分别为8.2 m,3.0 m与3.4 m,空重不超过22 t,最大荷载为240 kg,最大速度为25 kn,巡航速度为1 kn,当前最大下潜深度7 062.68 m,最大工作设计深度为7 000 m,也是目前世界上下潜能力最深的作业型载人潜水器,见图6。“海马号”无人遥控潜水器系统实现了从无到有的突破,下潜深度最大、国产化率达到90%,见图7。“海马号”的关键核心技术由我国自主研发,打破了国外技术的垄断。经过近6年的研发攻关,研发团队突破了本体结构、浮力材料、大深度水下液压动力源和推进、作业机械手和工具、观通导航、长距离信息传输、控制软硬件、升沉补偿装置等关键技术,先后完成总装联调、水池试验和海上摸底试验等工作,并针对试验中暴露出的问题和故障进行技术改进。

图6 “蛟龙号”水下载人潜航器Fig.6 “Jiaolong” underwater manned underwater vehicle
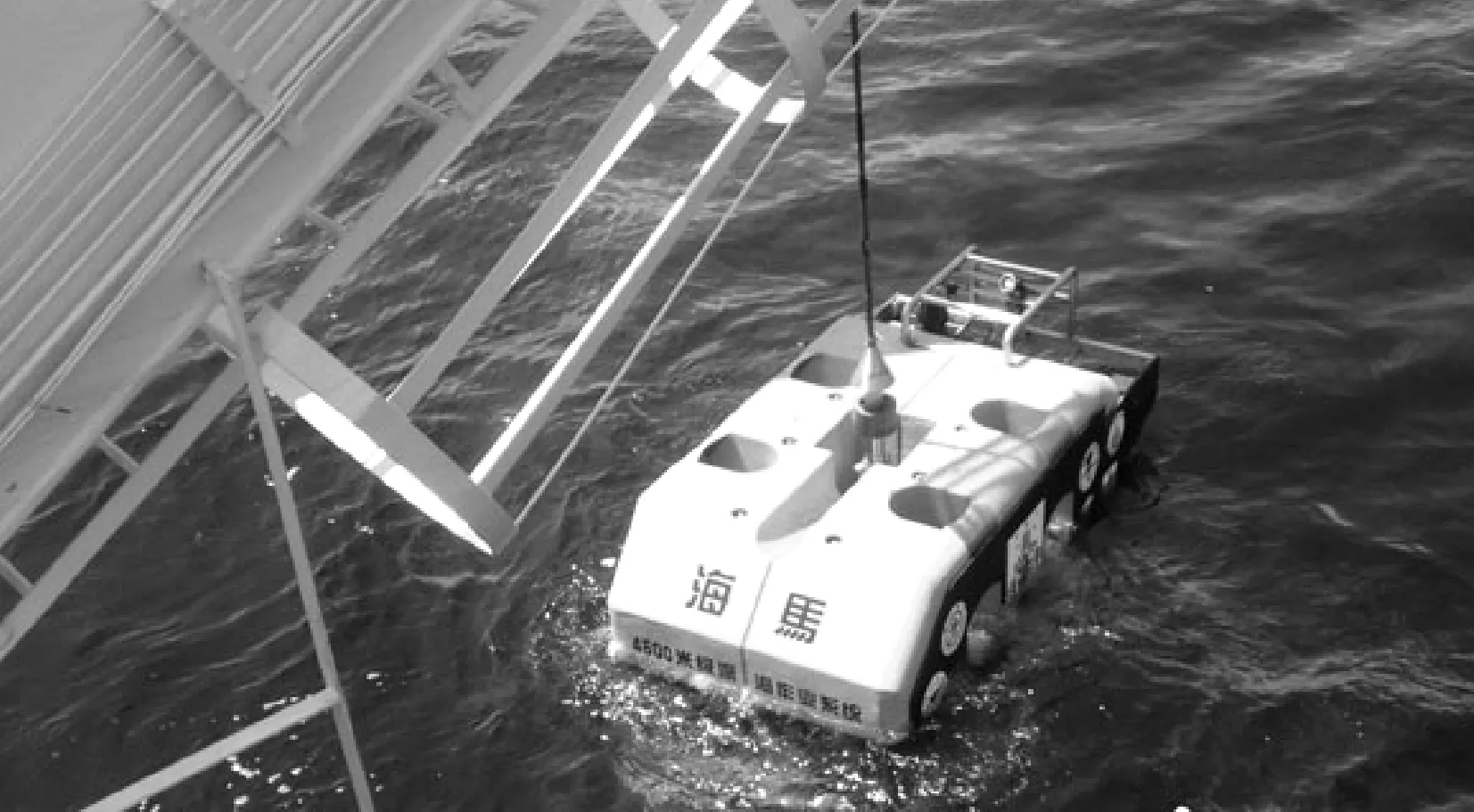
图7 “海马号”ROVFig.7 “Haima” ROV
水下潜航器是覆盖范围广、学科交叉融合紧密的复杂系统,它的研发涉及流体、结构、材料、生命支持、液压、水声、光学、通信、计算机控制等多门学科。由于水上作业环境充满了未知和挑战,风、浪、流、深水、压力等因素严重干扰了水下潜航器的运动和控制,且水下通信和导航也存在很多困难的因素制约[21],因此面向水下救捞任务的水下潜航器仍存在许多挑战,主要包括有:①全方位抗流能力。由于救捞现场的水下环境复杂,通常存在急流、紊流的干扰,有效的抗流能力是保障水下探测、辅助作业等救捞任务的首要条件;②水下长续航能力。尽管近年来,电池技术的发展,水下机器人续航能力有了很大的提升,但离人们的需求仍然有一定差距,开发高效率、高密度的能源是一项重要课题。此外,优化潜航器的推进系统也是提高续航能力的一个重要方面;③水下目标探测与识别。由于水下环境的复杂性,对水下目标的探测和识别应用也造成了很大的限制,可用观测手段也相当有限。目前,声学探测仍然是水下探测的主要手段,但是相比于光学图像,声呐图像的分辨率相对较低,且噪声水平较高,水下目标辨识的自动化水平和可靠性仍有待进一步突破;④水下通讯与导航技术。水下通信主要分为水声通信和光电通讯。目前主要依赖于水声通讯,但是水声的传播速度和能量衰减限制了通讯的及时性、全时行和作业距离[22]。水下导航方面,传统的导航技术包括推算导航、惯性导航、多普勒声呐导航和组合导航等。其优点在于结构简单且易于实现,但是存在导航误差随时间不断积累的问题。新的导航技术包括水下地形地貌匹配导航、重力磁力匹配导航等,但是通常需要事先的相关测量数据。发展可靠性高、集成性好的智能导航系统仍是未来的发展方向之一。
4.5 仿真演练与辅助决策
救助打捞作业的复杂性特点决定了专业的救助船员和潜水员必须具备精湛的技术,抢险作业技术水平要求高于普通船员,身临其境的水上救助打捞实践无疑是有效的途径,但水上事故本身的灾难性也决定了它的不可再现性。救助打捞训练仿真技术对救助船员、潜水员进行仿真模拟训练具有重要的意义。仿真训练具有针对性和反复性,需要根据特定情况进行大量重复的训练。例如,根据不同的海况(如大风、大浪、光线不充足、能见度低等条件),有针对性地进行操船训练、浑浊水域的水下作业等。在船员、潜水员勤加练习的过程中,系统需要尽可能地根据实际情况完整记录受训人员操作的细节,训练课程之后对采集数据进行分析总结,通过对比历史数据,反思每一次训练的进步与不足,以获得宝贵的经验,提升学习效率[23-25]。仿真训练软件开发及操纵模拟器的研制包括有模拟训练风浪池、驾驶台、机舱、电台、潜水池、减压舱及各种水底作业场景、打捞过程的应力计算等。
目前,在水路交通领域中船舶操纵模拟器和轮机模拟器相对成熟,已广泛应用于船员的培训。而用于救捞模拟与辅助决策的相关仿真技术与系统尚处于发展之中。武汉理工大学研发了一套海事系统仿真演练测试评估平台(见图8),包括海事应急指挥模拟子系统、船舶交通模拟子系统、验证评估子系统,可用于复杂现场救援训练研究、应急互动处置和演练过程研究、救援策略验证评估研究等。

图8 海事系统仿真演练测试评估平台Fig.8 Evaluation platform for maritime system simulation and training
面向水上救助打捞仿真的特点,需要突破的关键技术包括有:特定场景的三维环境生成与实时演化技术、救捞作业复杂物理模型的构建与高性能计算、软硬件及人员在环测试、安全管理与应急决策模型、多任务多角色协同仿真技术、大规模多尺度融合仿真技术等。
4.6 水下作业装备及信息化技术
水下作业装备的研发对打捞工程的作业效率、安全性等方面具有重要的意义[26-27],主要包括有水下自动穿千斤、背浮式打捞、水下抽油、水下焊接、水下切割等水下作业工具及相关技术。近年来,相关的技术和装备都在迅速发展,如拉力千斤顶的推广应用,高压射流的低温、远程开孔技术等。
信息化的建设也将有效提高救捞的效率和安全性[28-29]。如救助船舶和大型打捞工程船的信息化集成,实现救助现场风向、风速、气温、船舶航速、航向自动检测以及现场图像信息的采集、传输和处理,通过卫星通信系统与陆地信息网络的互连、信息交换等;救助信息管理、船舶指挥调度管理、办公自动化、视频会议系统、安全监督管理、基本建设管理、物资管理等应用系统的建设。
5 结束语
潜水救捞力量体系的建设广阔的覆盖范围和丰富的内容决定了系统工程建设的长期性。伴随着时间的推移,其影响力会不断扩大,效益也将不断增加。国家“一带一路”战略的建设和“海洋强国”战略的提出,为潜水打捞行业体系带来了重大的发展机遇和挑战。潜水救捞与海洋工程技术论坛的开展成为产业的深度跨界融合、资源整合和产学研用的纽带,分析了国内外救助打捞的发展现状、关键技术问题,展示了科研成果及救助打捞装备。从该论坛主题报告的总结分析中可以得出,我国救助打捞体系顶层设计更加明晰具体,救捞方案和经验不断积累和创新,救捞技术与装备不断快速发展,相关法律将不断完善和健全,有力推动了我国救助打捞力量的快速提升。大吨位打捞船舶设计与装备智能集成、水下高精度探测、大深度饱和潜水、水下潜航器、仿真演练与辅助决策等关键技术的突破与装备的改进研发,将为我国救助打捞事业注入新的动力。
参考文献References
[1]交通运输部救助打捞局.中国救捞志[M].北京:人民交通出版社,2012.
China Rescue and Salvage of Ministry of Transport of the People′s Republic of China. Records of China salvage[M]. Beijing:China Communications Press, 2012.(in Chinese)
[2]张代吉.潜水打捞立法与潜水打捞事业的发展[C].中国航海学会救捞专业委员会2009年年会暨救捞发展论坛, 武汉:中国航海学会救捞专业委员会,2009.
ZHANG Daiji. Legislation and enterprise development of diving and salvage in China[C]. The Rescue and Salvage Committee of China Navigation Institute or China Rescue and Salvage Association 2009 Annual Meeting in Conjunction with Search and Salvage Development Forum, Wuhan: China Rescue and Salvage Association, 2009.(in Chinese)
[3]赵长松.服务智慧海洋战略,引领行业创新发展[C].中国国际潜水、救捞与海洋工程技术论坛.厦门:中国潜水打捞行业协会,2017.
ZHAO Changsong. Service smart ocean strategy, leading industry innovation development[C]. International Symposium on Underwater Operations and Off-shore Industry, Xiamen: China Diving & Salvage Contractors Association, 2017.(in Chinese)
[4]宋家慧.中国海上搜救的沿革与发展[J].中国水运,2016,37(3):17-20.
SONG Jiahui. History and development of maritime search and rescue in China[J]. China Water Transport, 2016,37(3):17-20.(in Chinese)
[5]交通运输部救助打捞局.2016年救助打捞统计数据[R].北京:交通运输部救助打捞局,2016.
China Rescue and Salvage of Ministry of Transport of the People′s Republic of China. The rescue and salvage statistics report in China[R]. Beijing: China Rescue and Salvage of Ministry of Transport of the People′s Republic of China, 2016.(in Chinese)
[6]张 玲,谭志荣.长江干线监管救助一体化站点布局数字模型研究[J].交通信息与安全,2010,28(1):108-111.
ZHANG Ling, TAN Zhirong. Digital model for layout of stations for maritime supervision, management and rescue along Yangzi River [J]. Journal of Transport Information and Safety, 2010,28(1):108-111.(in Chinese)
[7]弓永军,张增猛.打捞工程[M].大连海事大学出版社,2012.
GONG Yongjun, ZHANG Zengmeng. Salvage engineering [M]. Dalian:Dalian Maritime University Press, 2012.(in Chinese)
[8]钟文军,刘菊娥,王 琮,等.大型回转起重船技术特点与发展研究[J].船舶与海洋工程,2012(1):69-75.
ZHONG Wenjun, LIU Jue, WANG Cong, et al. Large slewing floating crane technical characteristics and development[J]. Naval Architecture and Ocean Engineering, 2012(1):69-75.(in Chinese)
[9]夏益美.全回转起重作业船稳性研究[D].大连:大连理工大学,2006.
XIA Yimei. Research on stability of revolving floating cranes[D]. Dalian: Dalian University of Technology, 2006.(in Chinese)
[10]张国光,薛利群,董建顺,等.我国海洋水下工程技术的发展与展望[J].舰船科学技术,2009,31(6):17-26.
ZHANG Guoguang, XUE Liqun, DONG Jianshun. Development and outlook of ocean underwater engineering and technology in China[J]. Ship Science and Technology, 2009,31(6):17-26.(in Chinese)
[11]朱光文.我国海洋探测技术五十年发展的回顾与展望(一)[J].海洋技术学报,1999,19(2):1-16.
ZHU Guangwen, Review and prospect of 50-Year development process of ocean observation technology in China[J]. Ocean Technology, 1999,19(2):1-16.(in Chinese)
[12]VALKOVIC V. An underwater system for explosive detection[C]. The International Society for Optical Engineering, Orlando, Florida, United States: SPIE, 2007.
[13]JAFFE J S. To sea and to see: That is the answer[J]. Methods in Oceanography, 2016(15/16):3-20.
[14]JAFFE J S. Underwater optical imaging: The past, the present, and the prospects[J]. IEEE Journal of Oceanic Engineering, 2015,40(3):683-700.
[15]KOCAK D M, DALGLEISH F R, CAIMI F M, et al. A focus on recent developments and trends in underwater imaging[J]. Marine Technology Society Journal, 2008,42(1):52-67.
[16]方以群,赵浩泉,刘景昌,等.我国饱和潜水研究现状及其发展方向[C].浙江省医学会航海医学分会成立大会暨首届浙江省航海医学学术年会,宁波:浙江省医学会, 2012.
FANG Yiqun, ZHAO Haoquan, LIU Jingchang, et al. Research Status and Development of Saturation Diving in China [C]. Proceeding of 1stNautical Medicine Annual Meeting, Zhengjiang, Ningbo: Zhejiang Medical Association, 2012.(in Chinese)
[17]宋海鹰.饱和潜水专家系统的研究与开发[D].大连:大连海事大学,2015.
SONG Haiying. Research and development of saturation diving expert system[D]. Dalian: Dalian Maritime University, 2015.(in Chinese)
[18]张洪欣,马 龙,张丽婷,等.水下机器人在海洋观测领域的应用进展[J].遥测遥控,2015,36(5):23-27.
ZHANG Hongxin, MA Long, ZHANG Liting, et al. Application development of underwater robot in the field of marine observation[J]. Journal of Telemetry, Tracking and Command, 2015,36(5):23-27.(in Chinese)
[19]李 杰,周兴华,唐秋华,等.水下滑翔机器人研究进展及应用[J].海洋测绘,2012,32(1):80-82.
LI Jie, ZHOU Xinghua, TANG Qiuhua, et al. Development and research progress in AUG[J]. Hydrographic Surveying and Charting, 2012,32(1):80-82.(in Chinese)
[20]庞 硕,纠海峰.智能水下机器人研究进展[J].科技导报,2015,33(23):66-71.
PANG Shuo, JIU Haifeng. Current status of autonomous underwater vehicle research and development[J]. China Academic Journal Electronic Publishing House, 2015,33(23):66-71.(in Chinese)
[21]徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125-132.
XU Yuru, LI Pengchao. Development tendency of underwater robot [J]. Chinese Journal of Nature, 2011,33(3):125-132.(in Chinese)
[22]徐 文,鄢社锋,季 飞,等.海洋信息获取、传输、处理及融合前沿研究评述[J].中国科学:信息科学,2016,46(8):1053-1085.
XU Wen, YAN Shefeng, JI Fei, et al. Review on frontier of ocearn information acquisition, transmission, processing and fusion[J]. Scientia Sinica Informationis, 2016,46(8):1053-1085.(in Chinese)
[23]严新平,吴 兵,汪 洋,等.海事仿真研究现状与发展综述[J].系统仿真学报,2015(1):13-28.
YAN Xinping, WU Bing, WANG Yang, et al. Overview of development and current progress in maritime simulation research [J]. Journal of System Simulation, 2015(1):13-28.(in Chinese)
[24]崔 琳,时佳璐.海上搜救仿真系统开发与研究[J].舰船科学技术,2016(22):88-90.
CUI Lin, SHI Jialu. Development and research of simulation system for maritime search and rescue [J]. Ship Science and Technology, 2016(22):88-90.(in Chinese)
[25]宋良平.多Agent协作环境下的海上搜救任务分配方法研究[D].哈尔滨工程大学,2012.
SONG Liangping. Research of Maritime search and rescue task allocation method under multi-Agent collaboration environment [D]. Harbin: Harbin Engineering University, 2012.(in Chinese)
[26]王祖温.救助打捞装备现状与发展[J].机械工程学报,2013,49(20):91-100.
WANG Zuwen. Current development of rescue and salvage equipments [J]. Chinese Journal of Mechanical Engineering, 2013,49(20):91-100.(in Chinese)
[27]刘汉明.仿真技术在潜艇援救研究中的应用[C].中国国际救捞论坛,大连:中国航海学会救捞专业委员,2008.
LIU Hanming. The application of simulation technology to the research of Sub′s rescue[C]. China International Search and Rescue Conference, Dalian: China Institute of Navigation, 2008.(in Chinese)
[28]张学炜,马晓峰,窦腾飞,等.中国救助打捞通信及信息化发展[J].水运工程,2016(B10):120-124.
ZHANG Xuewei, MA Xiaofeng, DOU Tengfei, et al. Development of communication and information technology of China rescue and salvage [J]. Port&Waterway Engineering, 2016(B10):120-124.(in Chinese)
[29]孙 庚,冯艳红,赵树平,等.渔业船舶安全救助信息管理系统研究[J].交通信息与安全,2010,28(6):82-84.
SUN Geng, FENG Yanhong, ZHAO Shuping, et al. Research on information management system for fishing vessel safety and rescue[J]. Journal of Transport Information and Safety, 2010,28(6):82-84.(in Chinese)
[30]熊 伟.救助工程[M].大连:大连海事大学出版社,2012.
XIONG Wei. Rescue engineering [M]. Dalian:Dalian Maritime University Press, 2012.(in Chinese)
猜你喜欢
中外文摘(2022年19期)2022-12-17 09:44:20
水上消防(2021年4期)2021-11-05 08:51:44
河南水利年鉴(2020年0期)2020-06-09 05:43:56
当代音乐(2018年4期)2018-05-14 06:47:13
数学大王·低年级(2017年8期)2017-08-04 00:31:30
琴童(2017年7期)2017-07-31 18:33:48
学苑创造·A版(2017年7期)2017-06-24 23:29:45
小学科学(2017年5期)2017-05-26 18:25:53
河南水利年鉴(2017年0期)2017-05-19 02:29:42
文理导航·趣味课堂(2016年6期)2016-09-09 23:27:30