针织机械密度调节驱动器的一体化设计
2018-04-03 07:11浙江工业职业技术学院吴小良
电子世界 2018年5期
浙江工业职业技术学院 吴小良
绍兴龙晟机械制造有限公司 吴华盛
0 引言
按工艺类别,针织机械可分为纬编机和经编机。针织物具有良好的弹性、舒适性与延展性,拥有广泛的应用市场。而目前国内市场高端的针织机基本依赖进口,国家需要花费大量的外汇购买针织机系统。因此开发具有自主知识产权的高端针织机,努力提高国内针织设备制造水平和应用水平具有十分重要的意义[1]。
影响编织质量的因素有很多,其中一个很重要的影响因素是密度调节。在目前的针织机械中,比较成熟的密度调节装置原理是由密度电机驱动密度三角滑块上的密度压针三角和密度起针三角运动来实现的[2]。概括来说,通过控制密度电机的运动来改变织物密度。
1 数字驱动器设计方案
密度调节必须具有无极微调功能,所以动力部分选用步进电机,为了步进电机获得更好的控制效果,需要选用专用的驱动设备,因此,为了提高步进电机系统的运行性能,除了电机本身性能,还取决于驱动设备性能的优劣。
本文提出了一种数字驱动器设计方案,将步进电机驱动控制器与步进电机实现一体化设计,即将步进电机、运动控制器,驱动放大器,反馈装置组成一个整体放入一个驱动器腔体内。
现今市面上的控制系统皆采用驱动器与步进电机分离的方案,但是由于针织机械的成圈路数多,使得步进电机的驱动线路多,各个步进电机相线之间的干扰大,导致步进电机运行稳定性下降。同时,传统设计方案通常都是将多个步进电机的驱动电路设计在同一块板上并由一片控制芯片控制多个步进电机的运转,这就使得控制难度大大增加。
本方案中,驱动器与步进电机实现了一体化设计,并通过总线通讯由上位机对各个驱动器进行控制,避免了电机相线之间的干扰,增加了系统稳定性。而且由于本设计中各个步进电机及其驱动器都是相互独立的,上位机控制简单,这样也使得系统调试简单,安装方便,后期的维护也相对容易。
2 驱动器腔体设计
本设计实体采用如图1所示的设计方式。驱动控制器PCB板设计为40mm*40mm,所有模块均布置在该PCB板上,同时该板内嵌入步进电机腔体中。
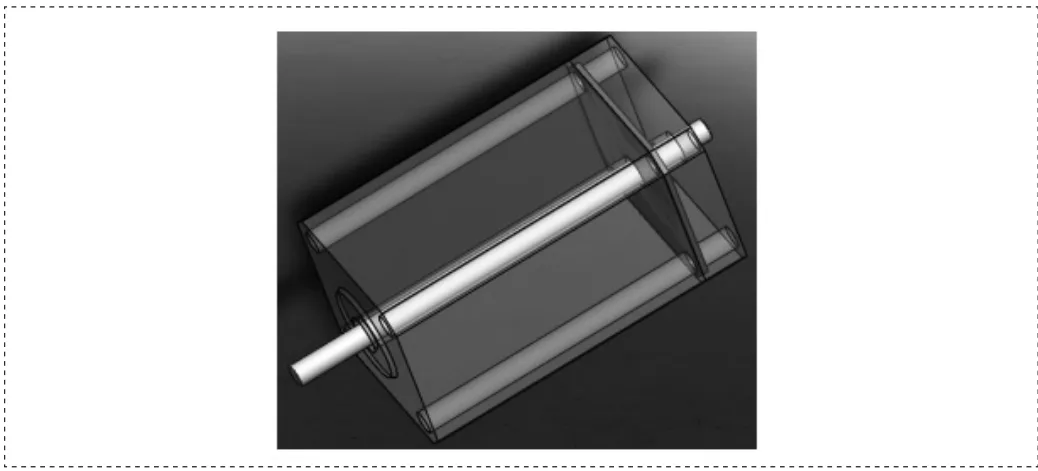
图1 驱动器腔体设计方案
为实现这样的一体化设计,硬件电路各个模块需要使用集成电路芯片来实现,这样能够有效地减少PCB布板的面积,同时又有良好的可靠性与稳定性。
3 硬件电路设计
控制系统分为四个模块:电源模块、电机驱动模块、电机控制模块以及反馈模块。驱动器总体设计结构如图2所示。
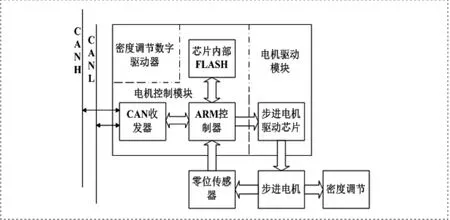
图2 驱动器总体框图
3.1 驱动部分电路设计
步进电机驱动芯片采用BD63860,因为超薄封装有利用集成在较小壳体内,良好的散热性能保证在相对封闭的环境里可以长时间工作.步进电机驱动芯片电路原理图如图3所示。
本设计禁用复位功能,因此该引脚接高电平。该芯片内部自带肖特基二极管,因此将SR端接高电平,即自身整流模式,不需要外部肖特基二极管,SR端接高电平。
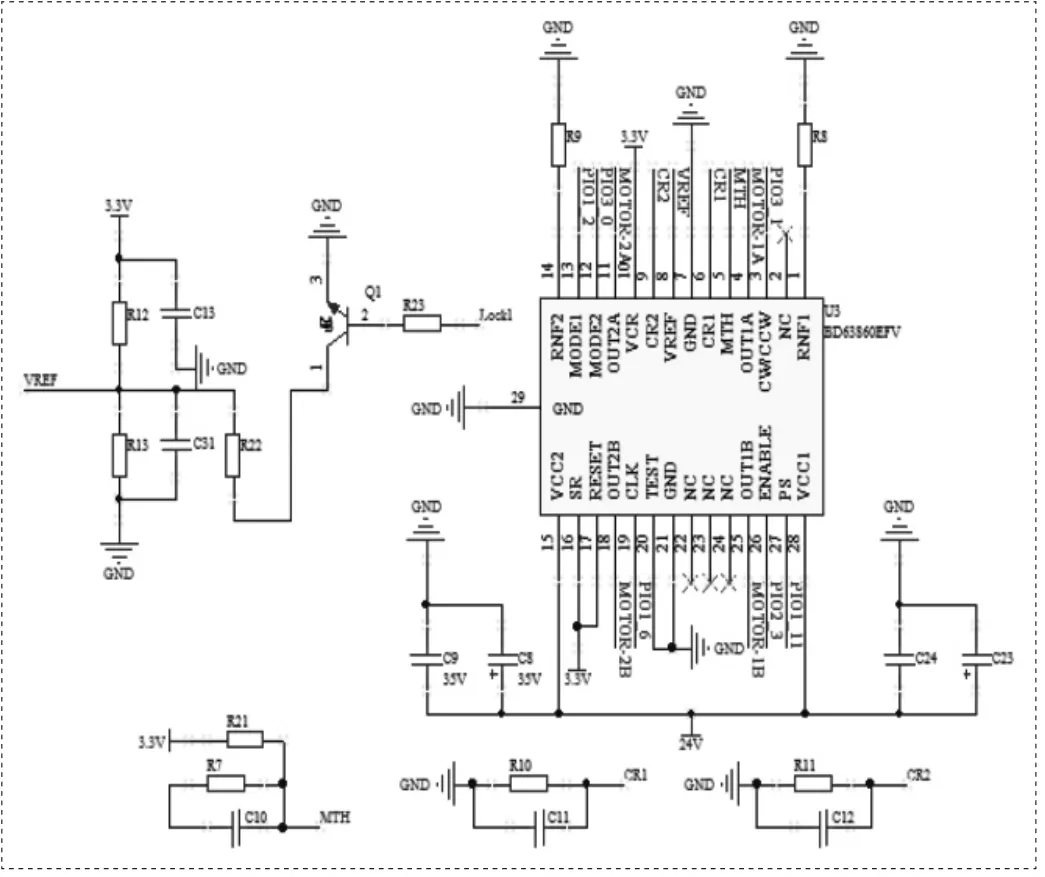
图3 步进电机驱动模块原理图
RNF1、RNF2是PWM斩波电流设置端口,斩波电流输出计算公式如下:

公式中RNF=0.2Ω,Vref=1.73V,有电阻R13与R12分压得到,斩波电流是。
关断时间由CR1、CR2端口所接的电容与电阻决定的,本设计采用1000pF的电容和39kΩ的电阻,得到关断时间为31.6μs。
3.2 控制部分电路设计
本设计使用了基于ARM Cortex-M0的LPC11C24芯片,该芯片集成了TJF1051 CAN收发器,不仅可以提高CAN通讯的可靠性,减少硬件电路干扰等,同时在电路板上节省空间50%以上,降低总体成本80%[4]。
该芯片主要供电电压为3.3V,主要是由电源模块提供的。供电电压源正负端接了电容,主要的作用为滤波,为芯片提供一个稳定的电压。时钟电路主要在CLK_OUT和CLK_IN这两个引脚上接入晶体振荡器和电容,为芯片提供时钟信号。外部晶体振荡器可以为主时钟提供精确的占空比为50%的时钟信号[5]。
4 软件设计
驱动控制器软件通过CAN接受和发送指令,实现步进电机运动控制、步进电机归零、步进电机参数设置。
4.1 CAN应用层协议定制
CAN支持标识符(ID)长度部分为11位和29位报文格式,本设计采用29位报文格式。ID0~ID7为8位控制指令;ID8~ID20为预留位,用于未来系统的扩展。ID21位为全局指令位,表示是单独接受还是多方接受。为ID22~ID28为接收地址位,共7位,最多可控制27=128个步进电机;
4.2 步进电机控制程序设计
步进电机的控制主要包括步进电机归零、步进电机运动控制。其中运动控制又可以分为电机使能控制、速度控制、转向控制、转动步数控制等。
归零操作通过来霍尔传感器检测步进电机零位,当主程序接受到CAN报文要求归零,启动电机,当电机转到传感器发送的电机零位点,关闭电机转动,完成归零操作。
电机势能控制通过设置ARM芯片与电机相连的控制管脚来实现。电机速度控制通过控制发送脉冲的频率来控制,转动步数控制通过控制脉冲数目来实现。
电机加速通过定时器重装载实现。即在定时器中断时关闭定时器计数,之后重新装载定时器寄存器值,再打开定时器计数。由此每两次进入中断便改变一次定时时间直至达到指定运转速度。

图4 步进电机控制程序框图
5 总结
本文为针织机械设计了一种集成度更高的密度调节驱动器,将运动控制器、驱动放大器和反馈装置组成整体放入一个腔体内从而实现了一体化的设计,整个驱动器通过CAN总线与上位机通讯,并详细介绍了驱动器的软硬件设计。
经现场调试证明,该驱动控制器安装方便,运行良好,实时性高,步进电机运行平稳且无失步,较好的满足了针织机械对密度调节驱动器的要求。
[1]李军.基于WinCE平台的圆纬机控制系统的研究与开发[D].北京:北京邮电大学软件工程专业,2008.
[2]孙平范.圆形针织机的密度调节装置[P].中国专利:201120340142.4,2011-09-13
[3]幸坤涛.步进电机驱动器BD63860及应用[J].电子世界,2009,30(04):17-19.
[4]NXP公司.NXP推出首款LPC11C22和LPC11C24整合式CAN收发器微控制方案[EB/OL].[2011-01-26].http://www.el--ecfans.com/baike/bandaoti/bandaotiqijian/185903.html.
[5]NXP SemiConductors.LPC11CX2/CX4 Product Data Sheet[EB/OL].Rev.3-27 June 2011.
[6]王学峰.CAN总线技术及应用[J].赤峰学院学报(自然科学版),Journal of Chifeng University(Natural Science Edition),2008,24(02):52-53.
猜你喜欢
好日子(2021年10期)2021-12-02
电脑爱好者(2020年6期)2020-05-26
少年漫画(艺术创想)(2020年9期)2020-03-19
纺织服装流行趋势展望(2020年3期)2020-02-01
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
光学精密工程(2016年5期)2016-11-07
纺织服装流行趋势展望(2016年6期)2016-05-04
电源技术(2016年2期)2016-02-27
上海电机学院学报(2015年3期)2015-02-28