高精度激光测量和激光通讯的指向调整机构研究与设计
2018-04-03 07:11:17河南省电子信息产品质量监督检验院韩宇星
电子世界 2018年5期
河南省电子信息产品质量监督检验院 韩宇星
1.引言
激光测量和通讯是一个新领域。我国在此方面的应用,包括激光雷达和激光通讯等。激光的使用,非常重要的一个环节是光线或反射镜的的方向调整。由于激光的特性,对激光指向调整机构的要求往往很高,分辨率常常在5微弧度左右。另外,由于空间限制,要求的机构体积越小越好。星载的系统要求更严格。传统的调整机构,很难满足这些要求。本文介绍一些这方面的设计和应用,着重介绍一种高精度的指向调整机构。
2.激光的指向调整机构的设计分类及要求
激光的指向调整机构的设计要求,一般将这种调整称作“自准直”,在作为激光指向,搜索的功能来看,似乎太局限。近几年,由于激光技术的发展,激光测量,如大气测量、植被测量、云雨测量等,逐渐开始研制使用。激光雷达的研制应用也日渐发展。激光通讯也从地面,到空中,并向太空延伸。
激光的指向调整机构的设计要求,分为调整的角度范围和调整度精度两个方面。调整范围根据具体的使用环境,有360°连续调整;局调整如0-90°调整;和小角度调整,如±1°等。调整精度包括定位精度,分辨率,重复性等。激光作为高精度的测量或通讯设备,对光线的调整要求也是很严格的,要求光线调整角度的分辩率5微弧度以内,如果是反射型的反射镜,折合到镜的旋转角度为2.5微弧度(约0.5角秒),这是一个相当高的数值。
为了达到激光光线的调整要求,现在的设计采用的方法,大致有三种。第一种是采用高
分辨率电机。第二种是采用光学折射镜的方法。第三种是采用杠杆臂的机械结构形式。前两种方式的应用都有一些局限,高分辩率的电机可能使用压电陶瓷旋转电机,要专门定制,精度、力矩尚存一些技术问题,光学折射使用的楔形镜结构,同样有设计复杂等一系列光学问题要解决。下面着重介绍第三种即采用杠杆臂式的机械结构形式。
这种设计是利用杠杆的放大原理,实现位移到角度转化来实现调整。这种方案是常规的结构设计方案,容易实现高精度。这种方案一般是有一个旋转中心,然后使用丝杆,楔形面,凸轮,偏心轮等结构来实现两个方向的调整。旋转中心可以由球支撑,柔性支撑等来实现,还可以用十字轴的形式实现。下面介绍一个已经可以实现高分辩率调整的方案,如图1所示。
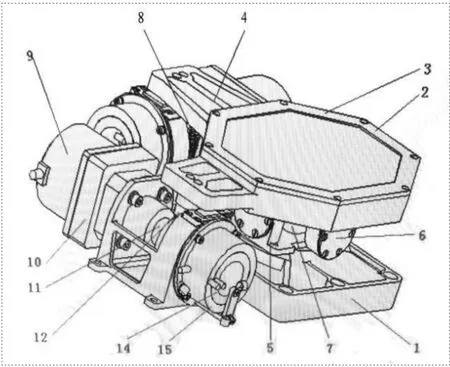
图1 杠杆臂式机械结构示意
3.旋转中心的设计和调整
在激光指向调整机构设计中,旋转中心的设计是一个难点,理论上要求在调整的时候旋转支撑中心需要保证:
(1)旋转中心尽量不发生变化,否则影响调整精度(变化范围在0.5μm内);
(2)高度灵敏,不能有变形吃掉调整量。
(3)两个调整轴线相交,这样才能消除由此引起的阿贝误差。
(4)两个方向调整的时候尽量减少相互干扰。
要达到上述几个要求,需要认真考虑。在方案设计的初期曾采用弹性环节作为旋转中心。如图2所示的弹性结构,优点是结构简单,工艺处理简单,灵敏度高,可以达到微小位移,但据点是旋转中心是变化的,另外调整范围±1°,也非常困难,要达到就必须增加高度,而高度增加又导致旋转中心的更不稳定。弹性结构变形后轴线的回复,是无法和滚动轴承类的轴系相比的。采用如图3所示的球较支撑结构,优点是中心保证好,加工精度高,容易达到高精度,但缺点是球面面积大,摩擦力偏大,并且需要添加弹性封闭机构,星载使用容易产生真空冷焊。

图2 弹性支承示意图
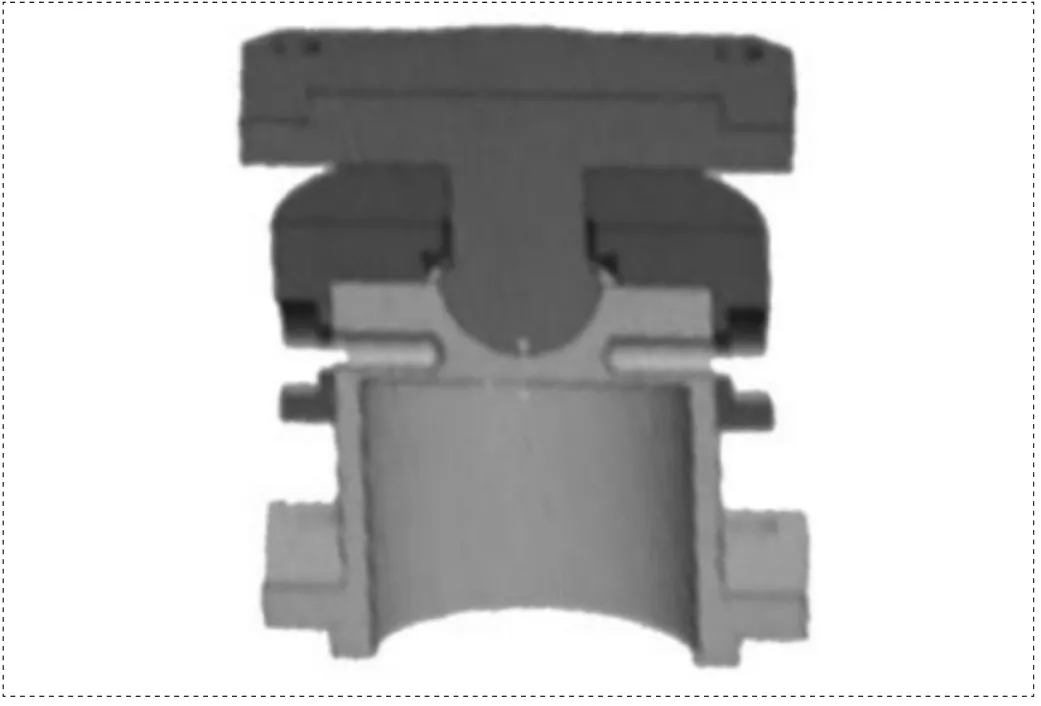
图3 球铰支承示意图
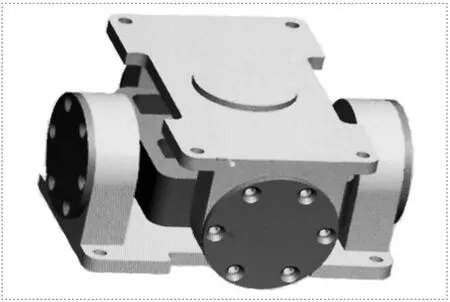
图4 十字轴结构示意图
调整旋转中心最终决定采用十字轴形式的旋转轴布局,调整和安装底座分别交叉固定的方式(图4)。反射镜结构固定在上端的轴承座上,底座固定在下端的轴承座上,这种结构方位和俯仰存在耦合,但耦合度很小,不影响使用。
4.旋转中心的驱动原理
旋转中心的驱动原理是:步进电机经过电气细分,输出到谐波减速器,谐波减速器直接驱动凸轮转动,凸轮和反射镜架上的球头接触,由弹簧将反射镜架通过球头压紧在凸轮上,方位和俯仰部分相同,十字轴两个轴分别是方位和俯仰的旋转中心,轴线到球头的距离就是杠杆臂。杠杆长度不能太大,否则尺寸度太大;也不能太小,会导致放大倍数不够。根据电机,轴承尺度综合考虑,杠杆臂取100mm较合适。此种方式几乎能够同时满足对旋转中心的要求,是比较理想的结构,旋转结构最终的精度严重依赖于各轴上的轴承,所以采用高精度的轴承,同时采用开槽形弹簧施加预压力,一方面提供预应力保证旋转精度,另一方面消除温度交变产生的伸长收缩对支座产生的反力。目前,采用71900系列轻载角接触的轴承。P2级回转精度。此机构旋转范围在±1°区间。轴承回转精度比整圈回转要小得多,在1um以下。轴承星载环境还要求作喷溅MOS2处理,以增加摩擦特性,并防止真空冷焊。

图5 杠杆式调整机构测试图

表1 重复性测试数据Table 1. The repeatability test data (part)
5.旋转中心调整机构的测试
图5是这种机构的测试图。表1是测试的部分结果,需要说明的是测试采用的是偏心轮方式,对应镜面角度接近1°的时候,偏心轮接近旋转70°,线性变差。表中的5组数据是偏心轴旋转固定角度所得数据。由表1看出,正反转的时候,光线指向重复性基本在`1urad 范围,可靠的达到设计要求,经过最终测试,光线指向调整全程重复性优于2.5微弧度,折算到球头处的垂直位移,达到0.13um以下,也是比较高的。重复性在5urad充分说明该机构运动的稳定可靠,精度可以保证。完全可以满足激光指向的高精度调整要求。
6.结语
综合来看,杠杆臂式机构结构形式的指向调整精度相对较高。可达到国外资料中的同种应用。随着激光技术的进一步应用,更高精度的指向调整机构会逐渐出现。随着技术的发展,更好,更能适应使用环境的高精度指向调整机构的出现值得期待。
[1]谢晨波,韩永,李超等.车载式激光雷达测量大气水平能见度[J].强激光与粒子束,2015,17(7):971-975.(Xie Chenbo ,Han Yong,Lichao et al.Mobile Lidar for vixibility measurement HighPower Laser and Partical Beam2005,17(7):971-975.)
[2]张改霞,张寅超,胡顺星等.AML-1车载测污激光雷达探测大气边界层气溶[J].强激光与粒子束,2004,16(3):287-290.(Zhang Gaixia,Zhang Yanchao,HuShunxing;et.al.Measurements of planelary boundary layer aerosols with mobile lidar AML-High Power Laser and Particle Beams,2004,16(3):287-290.)
[3]Fioranil,Amenante M,Capobianco R,et al.Self-aligning lidar for the continuous monitoring of the atmosphere[J] Applopt.1998,37(21):4758-4764.
[4]Wang Xuan,Armenante M,Caapolbianco R,et al.Self-aligning lidar system and iits application [C]//Proc of SPIE.1998,3504:31-40.
[5]谭琨,邵石生.一种车载激光雷达自动准直系统[J].大气与环境光学学报.2008,3(5):344-348.(Tan Kun,Shao Shisheng .Aself-alignment system of a mobile lidar.Journal of Atmopheric and Environmental Optics,2008,3(5):344-348.)
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00
经济技术协作信息(2018年4期)2019-01-23 07:18:30
中学生数理化·八年级物理人教版(2018年6期)2018-06-26 08:36:36
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
传媒评论(2017年8期)2017-11-08 01:47:36
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41
中国卫生(2015年8期)2015-11-12 13:15:24
中学科技(2014年8期)2014-09-27 05:49:41