机载测云雷达信号处理系统研制难点分析
2018-04-03 07:11:06安徽四创电子股份有限公司黄兴玉余小强
电子世界 2018年5期
安徽四创电子股份有限公司 高 磊 黄兴玉 余小强 郭 俊
1.大动态数字接收机技术
机载测云雷达由于受到多种杂波的干扰,包括主瓣杂波,副瓣杂波,等高线杂波等,当天线仰角向下时,杂波十分强烈,为了避免接收机饱和,要求雷达的瞬时动态在90dB以上。假设本雷达系统的距离分辨率高(最高30米),其最大带宽为5MHz,所以对数字接收机的设计带来了挑战,根据中频欠采样的原理,数字接收机的处理增益为AD采样率/2倍视频带宽,所以对于5MHz IQ带宽,若采用100M采样率,其处理增益为10dB,如果需要达到90dB的动态,则AD必须采用16位,14位的AD变换器不能满足要求。16位的高速AD变换器功耗大,因而对于系统的散热要求也相对较高。
2.实时平台速度补偿
机载平台为高速移动平台,而雷达系统需要测量的云雨目标相比于飞机本身的移动速度而言,其速度较小,为了能够得到相对准确的云雨速度值,系统需要进行平台速度的实时补偿。其补偿的速度值需要根据当前平台的姿态和天线扫描的方位俯仰角等信息进行复杂计算得到,为了快速响应,需要采用专用的DSP进行计算并控制进行补偿,速度补偿还需要脉间严格同步,避免破坏回波的相干信息从而导致速度估值的不正确。
3.高速数据传输和实时处理
由于数字接收机放置在飞机的吊舱之内,而信号处理器和显控终端放置在乘员舱内,所以数字接收机需要将两个通道的回波数据传输至信号处理器。除回波数据外,可能还需要传输一些系统的其他状态或监控信息。并行传输需要的电缆多,可靠性低,所以在该系统中不宜采用,而采用光纤传输,可降低连接线数,提高传输可靠性并实现光电隔离,也可降低电磁干扰。假设雷达系统的最大距离分辨率高达30米,通道IQ速率高达5M,需要的处理能力是一般天气雷达的3倍以上,所以信号处理器需要较高的硬件配置。系统需要同时处理两个通道的数据,尤其是主通道需要进行多普勒参数的估计,运算量大,因而信号处理器采用多片DSP并行处理,如果采用当前最新的高速DSP,使用2片可以实时实现。同时由于输入的数据量大,在选择DSP时其IO带宽能力也十分重要。如雷达采用相干积累/非相干积累组合,因而脉冲积累数要求高,需要配置较大的高速缓存。
4.精确杂波跟踪
由于探测的目标相对速度较低,同时需要对速度进行定量测量,所以系统必须具有高精度的杂波跟踪能力,系统的杂波跟踪处理带来的很大的挑战性,大大加重了信号处理的处理压力和设计难度。
5.嵌入式网络接口
由于机载终端计算机为专用计算机,信号处理器为了避免和其硬件的过多耦合,因而采用脱机独立模块设计,利用标准的以太网和终端实现命令和处理结果的传输。处理结果的传送数据量相对较小,同时考虑到机载计算机的典型配置,信号处理器网络接口可采用100M以太网,并由DSP实现网络协议和通信,采用嵌入式无缝设计而不采用外挂的网络模块,以提高可靠性和缩小体积。
6.机载平台算法的特殊处理
6.1 杂波处理
机载测云雷达系统相对于其他雷达系统而言,杂波干扰更强,杂波包括主瓣杂波,副瓣杂波,等高线杂波等,对于机载雷达,由于所探测的目标和警戒雷达不同,其目标速度相对于地面速度很小,而飞机本身的速度则很大。由于飞机相对速度的影响,扫描空间的动态相对变化,导致地物回波的谱宽展宽很多,中心频率也不再为零频,这给地物的对消处理带来了很大的困难。在传统的警戒雷达中,由于目标的相对速度在大多数情况下和地物有明显区别,所以可以采用杂波跟踪进行杂波多普勒频移的估计,从而对回波进行校正,最后利用MTI/MTD进行杂波的抑制。但是在机载测云雷达系统中,由于波长短,其多普勒频移远比一般的雷达大,地物的高速运动可能导致回波目标速度的多次折叠,从而给杂波估计带了困难。由于地物目标偏移零频而导致其谱副瓣迅速抬高,可能会淹没有用目标,所以在处理时必须加低副瓣的窗函数。数字接收机必须具有较高的动态范围,不能使地物杂波饱和而恶化副瓣。由于是移动平台,所以对于地物杂波的处理,既不能采用杂波图的方式,而由于附加平台移动速度的影响,传统的高通滤波器性能受到很大的限制,所以杂波处理在信号处理器上取得很好的处理效果难度极大。为了降低杂波的影响,应当采用低副瓣天线,同时对于天线的扫描范围在特定的条件下需作一定的控制,以避免强地物的干扰。同时可以选择合适的安装位置和探测方向,选择垂直于平台前进方向影响最小。
6.2 速度补偿
由于雷达系统需要对云雨目标的速度进行定量测量,所以需要对飞机移动速度进行定量补偿,而且补偿的精度和实时性要求较高,补偿的误差最终成为回波目标的误差。警戒雷达的补偿只要求将杂波谱拉回到对消滤波器的阻带之内能够被对消即可,不需要确定目标速度,但是本雷达还需要测量回波的速度。为了提高速度补偿的实时性,可采用在数字接收机中频级进行速度补偿,利用惯导信息控制计算单元实时计算出当前相对雷达天线波束指向的径向分量,输送给中频处理单元进行校正,并同时将该惯导信息传送给信号处理器,便于记录和回放。由于需要对目标回波进行速度计算,所以在进行速度补偿时,必须和信号处理处理同步进行,速度补偿不能破坏回波的脉间相干性。由于惯导数据和波束指向等存在误差,所以该速度补偿也将存在较大的误差,要做到Hz级的校正难度极大。速度补偿是杂波跟踪的第一级处理,其粗校正多普勒频移。
6.3 信号处理流程
来自数字接收机的回波数据按通道分成两路,主通道数据进行杂波跟踪、地物对消、功率估计、速度和谱宽估计以质量控制等,而通道2数据则进行杂波跟踪、IQ的功率估计以及质量控制等。两个通道的功率估计用于计算LDR。需要注意的是求解LDR的数据必须使用杂波抑制前的功率值,否则杂波抑制会破坏LDR估值的正确性。而强度Z的计算,则必须通过CCOR的进行校正求得。
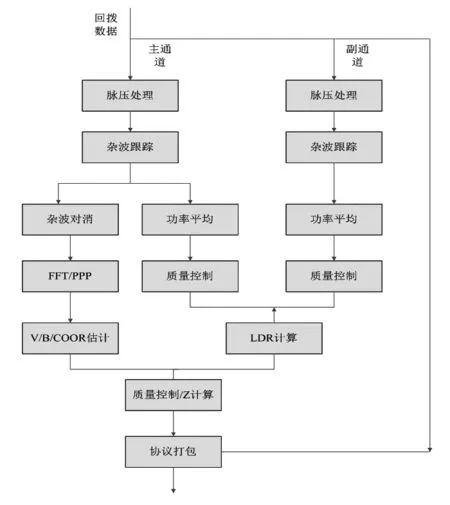
图1 信号处理流程图
7.结语
测云雷达自上世纪五十年代应用于研究云和降水以来,长期受制于硬件问题的困扰,随着固态毫米波组件以及大功率速调管技术的成熟,带动了W波段相参雷达的可喜的进展。同时,日本、美国等发达国家业已研制了Ka波段和W波段毫米波雷达。在对云目标发展过程的探测试验中,机载测云雷达扩大了雷达的机动性和探测范围。在毫米波衰减研究、毫米波雷达探测云高和云边界、双波长毫米波雷达在探测云水和固态水含量反演、双线偏振毫米波雷达在云分类研究等方面都取得了明显的进展。作为系统的核心部分,机载测云雷达信号处理系统的算法和处理性能仍需进一步的探索和升级。
[1][美]George W.Stimson,吴汉平等译.机载雷达导论[M].电子工业出版社,2005.01.
[2]吴顺君.雷达信号处理和数据处理技术[M].电子工业出版社,2008.03.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18 07:31:04
科学与信息化(2021年30期)2021-12-24 08:00:20
北京航空航天大学学报(2021年9期)2021-11-02 08:24:24
成都信息工程大学学报(2019年6期)2019-08-13 03:30:54
中国科技博览(2018年32期)2018-09-10 09:07:56
电脑与电信(2018年11期)2018-02-16 05:41:36
现代兵器(2017年4期)2017-06-01 09:06:51
西北工业大学学报(2015年3期)2015-12-14 13:08:44
雷达与对抗(2015年3期)2015-12-09 02:38:58
遥测遥控(2015年2期)2015-04-23 08:15:22