大跨度桥梁高支模支架安全监测技术
2018-04-03 01:37王卫星黄冠杨江苏阳湖建设项目管理有限公司江苏常州359上海市机械施工集团有限公司上海0007
建筑科技 2018年4期
王卫星,黄冠杨(.江苏阳湖建设项目管理有限公司, 江苏 常州 359;.上海市机械施工集团有限公司, 上海0007)
对大型桥梁结构施工进行动态位移监测,可以及时发现结构物的危害并及时采取相应的维护措施,避免灾难性事故的发生。这对结构物的安全施工和运营损伤监测具有非常重要的意义。但是,对于大跨度桥梁结构,传统的监测方法很难发挥应有的作用。如果直接通过位移传感器进行动态监测,一方面传感器的安装位置无法很好解决,另一方面会对施工过程产生干扰;如果采用全站仪测量位移,虽然对施工过程干扰较少,但无法进行动态监测;如果通过加速度传感器间接采集结构的位移信息,则需要进行两次积分,会导致误差累积[1]。因此,如何及时有效地监测支架施工变形情况,提高支架施工变形监测的无人化、自动化,是亟待解决的重要问题[2]。
本文研究大跨度桥梁高支模支架施工变形监测系统的原理与软硬件系统的构造组成,并通过江苏常州地铁 1号线高架桥梁施工项目进行试验测试,以验证软件算法的可靠性和测试系统的精度。
1 系统原理
桥梁高支模支架施工变形动态监测系统主要由软硬件两大部分组成。硬件部分包括图像采集模块、数据传输处理模块、LED 补光模块、测量标靶以及监测系统服务器等。施工过程中,图像采集模块自动采集监测区间内支架上测量标靶的实时图像。当支架发生变形时,测量标靶上的观测点位置发生变化,监测系统自动识别变形观测点,并将数据传递给监测系统服务器。夜间作业时,使用 LED 补光模块进行补光,提高识别率。支模支架施工变形动态监测硬件系统示意如图1所示。

图1 高支模支架施工变形动态监测硬件系统示意图
软件系统主要由云台控制子系统、相机控制子系统、图像识别子系统、数据存储及处理子系统等组成。云台控制子系统主要负责接收主系统的定位请求,然后向旋转云台发送旋转指令;相机控制子系统主要负责接收主系统的采集指令,然后向数码相机发送拍摄指令并接收照片数据;图像识别子系统主要负责对主系统得到的照片进行识别,以获取预设目标在图像中的位置、大小等数据;数据存储及处理子系统驻留在远程服务器,负责接收和存储来自主系统的目标识别数据,并对数据进行分析以确定预设目标的相对位移量。软硬件系统关系如图2所示。

图2 变形监测软件与硬件系统关系图
2 系统组成
2.1 桥梁高支模施工变形监测硬件系统
桥梁施工支架变形监测硬件系统关键部分由数字图像采集设备、监测系统服务器两大部分组成。
2.1.1 数字图像采集设备
数字图像采集设备由数码相机、高倍率长焦距镜头、光学数控水平转台、竖直转台及设备壳体等 5 个部分组成。数码相机通过 USB 接口线连接监测系统服务器,水平和竖直转台分别通过 RS232 串口线连接监测系统服务器,如图3所示。

图3 数字图像采集设备
(1)数码相机。选择佳能 5Ds 单反数码相机机身,传感器为全画幅尺寸(36 mm ×24 mm),最大图像分辨率约为 5 030 万像素。
(2)高倍率长焦距镜头。采用焦距 400~600 mm 长焦镜头,配合佳能 5Ds 机身,可以在 30 m 内获得 3 个/mm像素的图像解析度。
(3)光学数控水平和垂直转台。监测系统服务器上运行的监测程序通过光学数控水平转台控制数码相机的水平和垂直转动。为了确保误差满足测量精度的要求,转台的定位和重现精度要求非常高。传统的视频伺服云台难以达到所需的精度要求。硬件方案设计时,选择美国 Aerotech 公司的纳米运动转台(ANT 95-R-PLUS),如图4所示。

图4 纳米运动转台
纳米运动转台提供了很高的定位稳定性(0.005 ")和0.010 " 递增的运动性能,并且提供两个级别的精度等级。同时,系统可提供高动态性能,以确保光学系统动态捕捉和快速定位。
(4)设备壳体。为了确保设备在施工现场较为恶劣的环境条件下正常工作,设备必须考虑强光日照、高温、暴雨和冰冻等不利因素条件下的耐久性。对设备壳体进行设计,主要由上部壳体、底部基座和三脚架 3 部分组成。固定机位监测时采用立柱安装,不使用三脚架;临时定点监测时,采用三脚架设置。
2.1.2 监测系统服务器
监测系统服务器采用 Intel 酷睿高性能无风扇工控机(MEC-5071),如图5所示。

图5 监测系统服务器
2.2 桥梁高支模支架施工变形监测软件系统
根据高架桥梁施工环境特点,在获取变形数据的基础上,编制了能够对获取的图像进行自动识别、自动测量、自动报警的桥梁施工支架安全性监控的软件系统。监控系统软件以开放的方式进行编制,可为施工中其他监测项目提供支持,可为支架的应力、应变监测与上部结构内力监测提供数据录入接口。系统对接收的信息进行汇总、分析,建立特征曲线,与理论曲线实时对比,全面监测施工过程中支架的安全情况。软件系统的实现流程如图6所示。
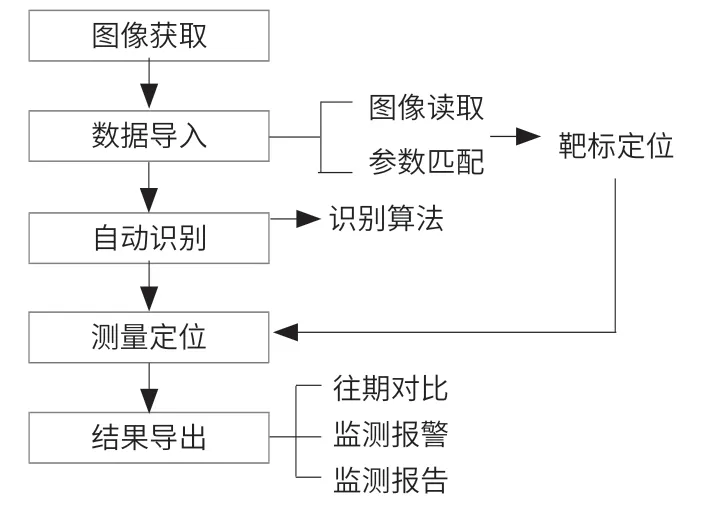
图6 软件系统流程
2.2.1 图像自动获取
采用云台控制子系统接收主系统的定位请求,通过软件编程控制向旋转云台发送旋转指令;采用数字图像控制与采集子系统接收主系统的采集指令,向数码相机发送拍摄指令并接收照片数据,从而实现图像自动获取的功能。
2.2 2 图像自动识别
首先加载包含靶标的图片到库中,形成识别系统内部的Mat 对象,将读入的图像转换为灰度图并进行图像的分割、特征检测等操作,以便于计算图像的直方图,通过计算灰度图对应的直方图,可以确定图像的颜色分布情况以及灰度值的变化范围;然后对灰度图进行阈值滤波,先前得到灰度图像中,只有靶标中的黑色区域依旧保留,除此之外其余像素均被清除;接着对阈值滤波后的图像进行膨胀处理,以增强靶标区域的强度和范围。对膨胀处理后的图像进行等值线提取,即可得到所有独立黑色区域的外轮廓;对等值线计算最小外包圆,得到各靶标中黑色区域的外轮廓后,需要将这些任意外轮廓换算为圆形,才能真正得到各靶标的中心坐标及半径值。
2.2.3 变形自动测量及报警
为了保证项目的研究内容有充分的科学依据,针对靶标自动识别软件算法,专门开发了自动测试软件,对现场采集的 10 万多幅数字图像进行识别测试,同时对超过限值的变形进行报警处理。
3 监测工程实例
为了验证和改进该监测系统的硬件平台和软件算法,进行现场工程试验,并根据试验结果对系统进行改进。现场施工工程为一个 30 m+45 m+30 m 的连续梁,墩身高为12.5 m,根据现场测量条件,在盖梁东侧布设 1号、2号靶标,分别为观测点 1、观测点 2。
现场测试过程跟踪混凝土浇筑全部过程,从晚 18∶00点开始,至次日22∶00 浇筑完成,每隔 30 min 进行一次拍摄。测点 1、测点 2 支架变形(1号、2号标靶偏移)实测数据分别如图7与图8所示。

图7 测点1支架变形监测数据

图8 测点2支架变形监测数据
2号靶标在16次采样时刻,人为移动了靶标位置。从系统测试和记录的曲线上看,变化十分明显,达到预设的报警值,系统能够自动响应,产生一次系统报警事件。系统硬件价格不足现有测量机器人单价的 50%,可以实现无人化、智能化的桥梁支架自动监测。与传统人工监测相比,提高监测频率100倍以上,能够实现7×24 h不间断监测,识别正确率达到98%以上。
4 结 语
本文针对大跨桥梁高支模支架现浇施工特点,基于机器视觉的相关软硬件技术,研发无人化、智能化的支架变形自动监测系统,对桥梁高支模支架现浇施工进行动态监测,并通过实际工程测试试验,对系统正确率和实用性进行验证,从而形成一套较完整的可操作性强的桥梁高支模支架现浇施工变形实时监测技术手段。
猜你喜欢
世界科学技术-中医药现代化(2022年9期)2023-01-17
舰船科学技术(2022年21期)2022-12-12
房地产导刊(2022年10期)2022-10-18
建材发展导向(2021年22期)2022-01-18
建材发展导向(2021年12期)2021-07-22
军民两用技术与产品(2021年10期)2021-03-16
建材发展导向(2021年23期)2021-03-08
铁道通信信号(2020年3期)2020-09-21
世界农药(2019年3期)2019-09-10
铁道通信信号(2018年8期)2018-11-10