
基于工作流网的指挥信息系统军事需求分析系统研究∗
2018-03-31 06:04方群
舰船电子工程 2018年3期
方 群
1 引言
指挥信息系统军事需求指在未来一定时期内,为实现预定军事战略目标和战争目的,对指挥信息系统发展的基本要求,是规划指挥信息系统发展和指导具体装备建设的客观依据。然而指挥信息系统军事需求分析存在着指挥信息系统军事需求不断变更、指挥信息系统军事用户对需求表达不畅[1]等难点期待有所突破。指挥信息系统的开发过程实际上就是与军事需求不断变化做抵抗的过程。军事设计不断的修改、军事秘密必须重写或者重新调整军事项目计划将不利于指挥系统的发展[2]。为此本文提出在军事需求分析中引入工作流系统,以期待对瓶颈问题有所突破。
工作流是工作流程的计算模型,指业务流程的自动化或半自动化的执行,即通过工作过程线性化后的并行任务执行过程。在此过程中,文档、信息或者任务按照一定的过程规则流转,实现组织成员间的协调工作,以期达到业务的整体目标。工作流系统的优点在于可以迅速、便捷地建立一个基于协同工作和业务流程的应用管理平台,让人员从繁琐的流程流转、任务分配、数据获取中解脱出来,而专注于重要模块的设计与开发。应用工作流技术是实现计算机支持的协同工作(Computer Supported Cooperative,CSCW)的一种重要技术,它通过将业务流程分解成良好的定义活动、角色和过程规则,并结合计算机和网络技术来实施流程管理、流程分析和流程再造。
分析指挥信息系统军事需求首先需建立需求分析流程,梳理需求要素组,明确不同需求要素的建模手段,从而形成一套完整的需求分析方法以指导需求开发。为此,本文提出基于工作流的指挥信息系统军事需求分析系统设计,给出了该系统的结构模型及功能设计并进行了Petri过程模拟。
2 基于工作流指挥信息系统军事需求分析的基本流程
指挥信息系统需求研究主要由威胁分析、作战任务、能力需求和解决方案4个分析阶段组成[3~4]。基于工作流系统中的指挥信息系统需求分析首先被描述成一系列的过程定义,然后过程定义再进一步分解成若干活动集合(图1)。
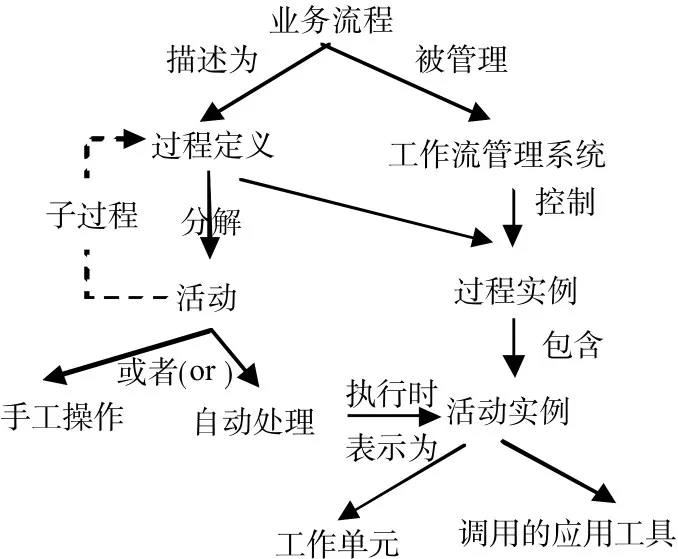
图1 工作流基本概念间的联系
工作流管理系统在实际应用阶段分为模型建立阶段、模型实例化阶段和模型执行阶段三个阶段(图2)。
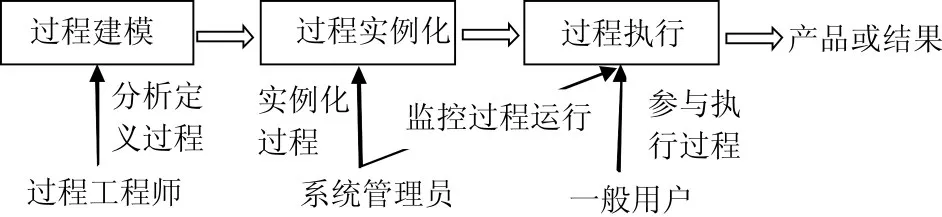
图2 工作流管理系统实施三阶段
目前,有许多方法和工具可用于描述工作流过程模型,例如,活动网络图的方式、EPC的方式、Pe⁃tri网的方式等。其中基于Petri网基础的工作流网建模方法有着较强的适切性[7~12]。作为一种从过程的角度出发描述和分析复杂系统的模拟工具,它具有形式化的语义定义、直观的图形表达、严格的数学基础以及基于状态的描述等优点,被越来越广泛应用于业务过程建模和流程优化。
3 指挥信息系统军事需求分析系统的工作流层次化模型建立
指挥信息系统军事需求分析是一个复杂的过程。虽然Petri网具有严格的数学基础和规范化的语义,能够对事件的并发、同步等建立模型,清楚地描述系统内部的相互作用,又能够对系统的动态性质(有界性、活性、可达性等)进行分析,适合于描述系统的动态行为,但是在大型、复杂的系统模型中,Petri网也存在着一些非常明显的不足,其主要困难就是模型状态空间的复杂性问题,将随着实际系统的规模增大而呈指数性增长[5]。为此运用于指挥信息系统中的模型在其建立过程中,需要利用细化理论,对其进行层次化建模和性质分析。这里所谓的细化理论其基本思想就是由己知或容易分析的简单网(简单Petri网的活性、有界性和可达性等比较容易验证)开始,逐步地用更加详细的子网代替初始简单网中的变迁或库所,而新加进去的子网并不改变原先网的某些性质。这种“自顶向下”、“逐步求精”的过程可重复进行到建模人员想要的细化程度[6]。即从最高层次开始,过程不断地被分解为子过程,反复地分解得到层次化的描述。层次化后的工作流模型是可靠的,其验证推理过程如下:
定义1 (Petri网):Petri网是一个四元组PN=(P,T;F,MO),其中
1)P={p1,p2,…,pm}是库所的有限集合;
2)T={t l,t2,…,tn}是变迁的有限集合;
3)P∪T≠∅,P∩T=∅;
4)F⊆((P×T)∪(T×P))表示库所和变迁之间的流关系;
5)dom(F)∪ cod(F)=P ∪ T(不存在孤立元素);
6)映射M0:p→{0,l,2,…}是网的初始标识。
有向网N=(P,T;F)是Petri网的基网,不包含初始标识。一个Petri网也可以表示为(N,M0)。
Petri网是一种有向图,由两种类型的节点构成,一种是库所节点p,用圆圈来表示,另一种是变迁节点t,用方框来表示,节点之间用有向弧来连接。Petri网的状态用托肯在库所中的分布来表示。
定义2 (前置集和后置集):设网N=(P,T;F),对x∈P∪T,记

称*x为元素x的前置集,x*为x的后置集,*x∪x*为x的外延。
定义3 (状态机):称网N=(P,T;F)为一个状态机(state machine)当且仅当 ∀t∈T ,都有|*t|≤1∧|t*|。限定每一个变迁最多只有一个输入库所和一个输出库所的Petri网。可以用一个含有多个输出变迁的库所来表示选择冲突,但不能模拟并发。
定义4 (状态机工作流网):若WF=(P,T;F)是一个工作流网,且对 ∀t∈T ,都有|*t|≤1∧ |t*|,则称WF是状态机工作流网,写作SMWF。
状态机工作流网的可靠性证明。
证明:网WF=(P,T;F)是一个状态机工作流网,对∀t∈T,都有|*t|≤1∧|t*|。根据工作流网的定义(2)其扩展网WF’是强连通的,可知对 ∀t∈T∪{t*},必有|*t|=|*t|=l。
对 ∀ ti∈T ,|*t|=1,不防设*ti=pi,由扩展网的强连通性则从库所i到库所pi存在一条有向路Ci=i,til,pil,ti2,pi2,…,pik-1,tik,pi。 其 中(i,ti1),(til,pil),…,(pik-1,tik),(tik,pi)∈F,令σi=ti1ti2…tik,设M=i[σi,则M(pi)=1,不存在死变迁。由于有每个变迁的发生恰好有一个库所减少一个托肯而另一个库所增加一个托肯,所以,只要i[σ>M,不管σ是什么,总有,即在任何可达标识下,只有一个库所存在且仅存在一个托肯。对于∀M∈R(i),因为不设防设M(pj)=1而M(p)=0对∀p∈P{pj}。从库所pj可达库所o,设该有向路 C=pj,tj1,Pjl,tj2,…,tjs,o,令 σj=tj1tj2…tjs,则M[σj>o。即对∀M∈R(i)都存在一个变迁序列可达状态o。进一步根据,只要库所o中有一个托肯,其他库所的托肯数必然为零。
综上所述,若一个工作流网中对∀t∈T,都有|*t|≤1∧|t*|,则该工作流网必然是可靠的,即所有的状态机工作流网SMWF都是可靠的。
下面以联合防空作战流程为例[4](图3),节选t1阶段任务受领部分工作流过程描述为:接受联合指挥中心下达防空指令,A防空群进行发射拦截,B航空兵群进行空中拦截,C对抗群进行电子干扰。
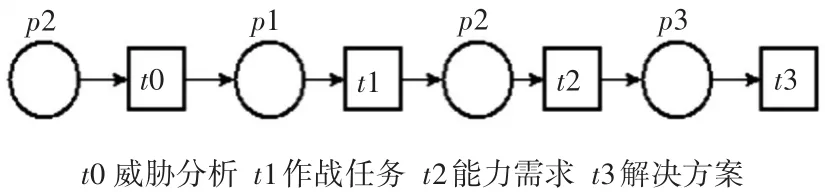
图3 联合防空作战流程
根据工作流网的基本定义,对这个过程进行建模。得到如图4所示工作流网模型。

图4 工作流网模型
由于对 ∀t∈T ,都有|*t|≤1∧ |t*|,所建立的工作流模型必定是可靠的,在没有异常发生的情况下能够正确结束。
4 结语
Petri网的层次化建模可以带来以下优点:1)隐藏子网内部结构,在建模时集中于相应的抽象层次。2)对于有相同结构的子网,不必重复建模和分析。3)使业务流程模型具有良好的结构,便于对其分析处理,有利于各个阶段的独立验证和确认。
[1]辛孟刚.指挥信息系统军事需求分析的难点与对策[J].信息化建设,2015(11):55.
[2]刘刚,邹自力,张霞等.指挥信息系统作战运用效能评估指导模式研究[J].兵工自动化,2015(7):65-70.
[3]邓克波,左毅,赵捷,等.指挥信息系统军事需求要素与分析流程[J].指挥信息系统与技术,2016(4):15-17.
[4]王志远,魏杰.作战指挥对信息系统需求研究[J].装甲兵,2011(6):15.
[5]吴哲辉.Petri网导论[M].北京:机械工业出版社,2006.
[6]张建强,张涛,郭波.基于Petri网的维修故障流程多层次仿真模型研究[J].武器装备自动化,2003,22(4):14-17.
[7]邓克波,沈伟平,等.综合电子信息系统需求验证方法研究[J].指挥信息系统与技术,2015,6(6):44-51.
[8]黄园媛,高春鸣.基于活动网络图的工作流过程定义工具的研究[J].计算机工程与应用,2006(2):48-51.
[9]Petri网在海军战役装备保障指挥中的应用[J].兵工自动化,2008,27(12):6-8.
[10]张璐,梁向阳.Petri网及其扩展研究[J].电脑开发与应用,2009,27(7):63-66.
[11]李仁松,赵磊,任炜.基于Petri网的指挥流程建模与优化[J].指挥控制欲仿真,2009,31(3):4-8.
[12]石万林,郭峰.进程网及其自顶向下建模技术研究[J].数字技术与应用,2013(9):44-45.
猜你喜欢
管理科学(2021年1期)2021-06-02
数字技术与应用(2021年4期)2021-06-01
空间电子技术(2021年1期)2021-04-09
军事运筹与系统工程(2020年1期)2020-09-11
电子制作(2019年22期)2020-01-14
北京航空航天大学学报(2019年9期)2019-10-26
科学中国人(2015年25期)2015-02-28
现代电子技术(2009年14期)2009-09-05
军事文摘(2009年9期)2009-07-30
全国新书目(2009年24期)2009-07-17
