基于序贯式卡尔曼滤波的车辆定位新方法
2018-03-30 03:23:31汤代佳
科技与创新 2018年6期
汤代佳,潘 蛟
(1.深圳市广宁股份有限公司,广东 深圳 518000;2.上海电机学院电气学院,上海 201306)
1 概述
车辆定位系统是智能运输系统中的一个重要组成部分,其精度决定着系统的性能[1-2]。精确、可靠的定位系统也是目前正在进行的城市交通系统智能化管理、特殊车辆的监控和调度、公路监测等必备的,因此,车辆定位技术具有广泛的应用前景和重要的社会意义[3-4]。车辆定位的精度与所用传感器的精度息息相关,而受高精度的传感器技术和工艺成本的制约,导致相关设备价格高昂[5-7]。为了提高车辆定位的精度,目前广泛采用多传感器融合的综合定位系统,以达到精确定位的目的。
一般来说,通常有3种不同的融合方法来处理测量信息:①集中式。这种方法具有数据损失小的优点,但是,传感器数量的增加带来了高维的测量数据,融合算法的计算量将急剧增加,大大降低了算法的实时性[8]。②分布式。这种方法先分别利用局部传感器的测量值给出状态的初步估计,然后通过加权融合得到最终的估计值。该结构具有系统造价低、可靠性高和通信量小等优点,但需要多个处理器同时工作,性价比不高[9]。③序贯式。它不仅能够取得与并行式融合滤波算法相同的滤波精度,而且能够将一次大规模的融合处理过程分解为多次小型的局部融合过程,降低了单次融合处理对系统计算能力的要求。同时,该方法避免了高维矩阵求逆,与集中式相比减小了计算量[10]。
本文结合序贯式科尔曼滤波的优点,利用多个传感器对移动的车辆展开跟踪,实现对其状态的估计,达到车辆定位的目的。新方法降低了对数据存储的要求,且具有估计精度高、计算量小的优点。
2 系统模型
我们研究一类沿屏面运动的车辆,其状态记为:

式(1)中:e和n分别为正东方向和正北方向的位置;ve和vn分别为正东方向和正北方向的速度。
系统的运动方程可以描述为:

式(2)中:xk∈Rn,uk∈Rl,wk∈Rp分别为目标的状态、输入和系统噪声;Ak,Bk和Gk和是合适维数的矩阵。假设wk为零均值的白噪声,其协方差为Qk,则系统的初始状态为。
为了提高对车辆跟踪的精度,我们采用N个传感器测量目标,每个传感器在直角坐标系下的测量方程为:

式(3)中:zi,k∈Rm为第i个传感器关于目标的测量输出;相应的测量噪声vi,k∈Rr为零均值;协方差为的Ri,k为测量噪声;Ci,k为测量矩阵;Γk为噪声矩阵。
3 车辆定位算法
这一节我们将给出递归的序贯式滤波算法,估计车辆的运动状态。在每一时刻,我们根据传感器所有的测量值对当前时刻的运动状态作出估计。为描述方便,记如下符合:

不失一般性,假定在当前时刻传感器测量值传到处理器的顺序依次为 Z1,k,Z2,k,…,ZN,k,首先利用上一时刻的估计值对当前时刻的状态进行预测,即:
相应的预测误差协方差为:
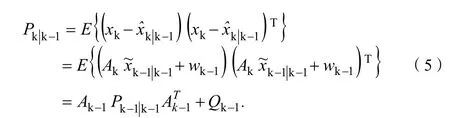
式(5)中用到了wk-1为白噪声这一条件。
当第一个传感器测量值到来时,用其对预测值进行更新,得到相应的估计值为:
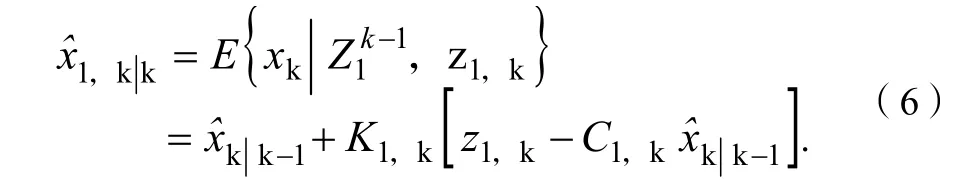
式(6)中:K1,k为相应的滤波器增益。
根据投影定理,可求得相应的滤波器增益表达式为:

相应的估计误差协方差为:

将式(7)代入式(8)中,化简后可得:

式(9)中:I为相应维数的单位矩阵。
基于此,当第i(i=2,3,…,N)个传感器的测量值到来时,利用该测量值进一步更新系统的估计值,类似于式(6)、式(7)、式(8)、式(9),我们可得:

滤波器增益为:

相应的估计误差协方差为:

4 计算机仿真
本节给出目标跟踪的仿真,利用2个传感器跟踪沿平面运动的车辆,时变的系统参数分别为:
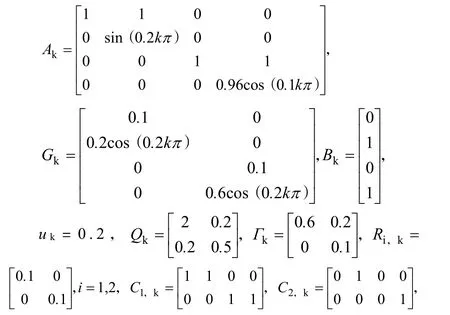

图1 车辆沿正东方向位移
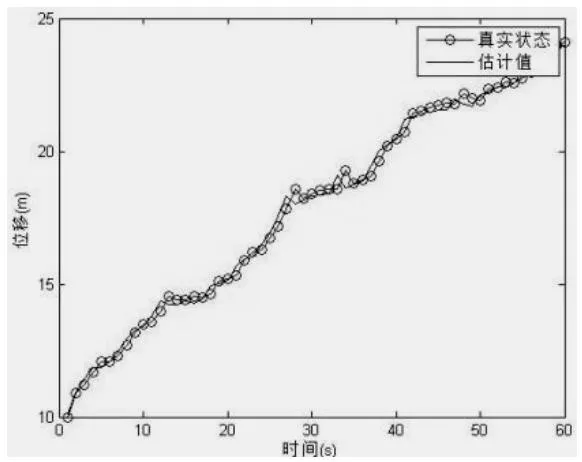
图2 车辆沿正北方向位移
5 结论
本文基于序贯式卡尔曼滤波研究了车辆定位新方法,相比于传统的数据处理方法,新方法具有结构简单、计算量小的优点。该方法实现的车辆定位可以为智能交通提供参考。仿真结果显示了新算法的有效性。
[1]刘建行,蔡尧,徐国艳,等.智能空间内车辆行驶状态信息融合试验分析[J].河南科技大学学报,2017,38(1):21-26.
[2]胡炜薇,杨莘元,蒲书缙,等.智能行驶车辆定位技术研究[D].长春:吉林大学,2017.
[3]赵彬,李炯,吴博文,等.马尔可夫修正的IMM-CKF目标跟踪算法[J].计算机仿真,2015,32(11):106-109.
[4]熊波,曲仕茹.基于模糊控制的智能车辆自主行驶方法研究[J].交通运输系统工程与信息,2010,10(2):70-75.
[5]李祎承,胡钊政,胡月志.基于GPS与图像融合的智能车辆高精度定位算法[J].交通运输系统工程与信息,2017, 17(3):112-119.
[6]马明明.基于视觉的多点车辆行驶状态跟踪[D].北京:北京航空航天大学,2012.
[7]张永忠,张军强,李颖宏.多路环形线圈车辆检测器设计[J].电子技术应用,2013,39(11):23-26.
[8]薛东国,陈博,张文安.通信受限下网络化多传感器系统的 Kalman 融合估计[J].自动化学报,2015,41(1):203-208.
[9]Deng Z L,Zhang P,Qi W J,et al.Sequential covariance intersection fusion kalman filter[J].Information Sciences,2012,189(7):293-309.
[10]张冬梅,茹安狄,程善.通信受限下网络化多传感器系统序贯卡尔曼滤波加权融合[J].控制与决策,2017,32(12):2162-2168.
猜你喜欢
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
学习月刊(2015年1期)2015-07-11 01:51:12
噪声与振动控制(2015年4期)2015-01-01 07:08:05
振动、测试与诊断(2014年4期)2014-03-01 01:14:09