
基于电流环的可重构机械臂碰撞辨识方法研究
2018-03-29 05:13邓雁真魏延辉赵延峰高苇杭
制造业自动化 2018年3期
邓雁真,魏延辉,赵延峰,高苇杭,谢 聪
(哈尔滨工程大学 自动化学院,哈尔滨 150001)
0 引言
模块化的可重构机器人能够以一套机器人模块,根据实时任务和环境的需要,快速搭建并产生多种工作构形,克服传统固定结构形式的工业机器人改装费用高,不能一机多用等缺点,可满足快速实时的生产生活需要,近年来成为国内外机器人研究的热点之一[1~4],模块化的可重构机器人因此能够在航天、制造业、核工业具有很大的发展前景和应用潜力[5]。
模块化的可重构机器人是由许多相关的有一定自治能力和感知能力的模块组成,各模块间有统一的接口环境,可用于传递力、运动、能量和通信,通过模块之间的连接断开操作和相互运动来自动改变整体构形,扩展运动形式,完成多种运动及操作任务[6]。
可重构机器人在执行任务的时候,要达到预期的目标点,很多机器人都是离线状态下工作的,其中目标点、运动轨迹、运动速度、运动加速度、力矩、阻抗等内容需要预先设定好,机器人在运动过程只要按照指定的数值走就可以。但是工业机器人的自由度多,运行功率大,工作环境复杂,所做的动作也较为复杂,在其工作空间中有着不可预料的状况,机器人很可能与周围的物件发生碰撞,导致物件或者机械手损坏[7]。更为严重的是与进入其工作空间的人发生碰撞,造成对工作人员的伤害,产生不可挽回的严重后果[8]。为此,有必要解决机器人的安全性问题。所以会给机器人添加各种各样的传感器,但是这又增加了机器人复杂性,对机器人的运算速度产生了很大影响,让整个工作增加更多的中间反馈环节。沈自所王洪光[9]利用力矩方式判断可重构机器人构形,为可重构机械臂进行环境障碍物辨识提供借鉴。
本文借鉴已有的研究成果,利用人在未知环境下抓取物体操作,通过检测关节驱动电流的变化分析所受到的关节力矩,判断机械臂是否与障碍物碰撞和干涉,然后重新规划轨迹。
1 可重构机器人系统
可重构机器人主要有六个模块组成,分别为转动模块、腕部模块、摆动模块、连接模块、辅助连接模块和执行模块。通过六个模块的互相不同顺序拼接方式,快速建立一套实用性强的机器人。
转动模块是可重构模块的基本部分,两端固定的连接模块回转首先做相对运动。根据构型的需要设计了两个转动模块(大的编号为模块1,小的编号为模块5),机构如图1(a)所示。
摆动模块是一个双方向的旋转摆动,根据构型的需要设计了两个摆动模块(大的编号为模块2,小的编号为模块4),如图1(b)所示。
各个关节模块中使用了统一的连接模块,连接模块1个是母头,另一侧是公头,链接模块统一,就可以互相快速组装拼接(编号为模块3),如图1(c)所示。

图1 可重构机器人模块
这款可重构机器人的执行部分就是夹持器,利用步进电机旋转,通过齿轮闭合,可以控制夹持器的开关(编号为刚体7),结构如图1(d)所示。
连杆没有运动单元,为了机器人某一部分在需要长距离使用的时候可以加入连杆部分,增加这部分长度,如图1(e)所示。
腕部模块有两大部分:横向的摆动部分和纵向的回转部分(摆动部分编号为模块6(摆),回转部分编号为模块6(转)),其整体设计小巧灵活,如图1(f)所示。
2 可重构机器人电流环采样系统
2.1 可重构机器人模块控制系统
可重构机器人模块控制系统以DSP2812作为主控芯片,通过EV管理器,进行PWM编程,将驱动信号发送到光耦器件进而输出到驱动芯片,再利用内部QEP电路确定机器人的转动位置以及进行智能化控制,如图2所示。
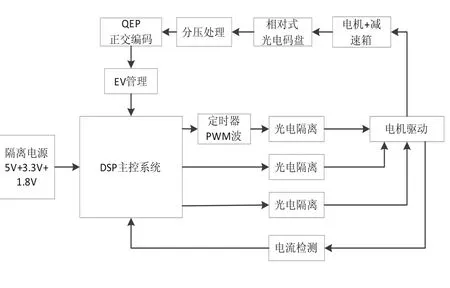
图2 可重构机器人模块控制系统
2.2 电流采样系统设计
电流采集方案使用的是基于霍尔传感器原理的WCS2702单通道电流检测传感器,其具备宽电压供电、测量精准、响应时间快、灵敏度好、线性度1000mV/A、检测电流范围是-2A到2A之间的特性,在交直流电流检测,电机电流检测等领域都有非常好的应用。
电流正方向流入时输出电压为:
电流负方向流入时输出电压为:

图3 电流采样系统
3 基于电流环的碰撞辨识
本文定义模块1为刚体1、模块2为刚体2、模块3为刚体3、模块4为刚体4、模块5为刚体5、模块6(摆)为刚体6(A)、模块6(转)为刚体6(B)、模块7为刚体7。
由于ADAMS中更多的是刚体碰撞检测,但是实际当中柔性碰撞的情况也非常多,所以下面通过在可重构刚体上增加单点受力的情况下分析各关节所受力矩,如图4所示,这样可以模拟出碰撞的一个真实过程。
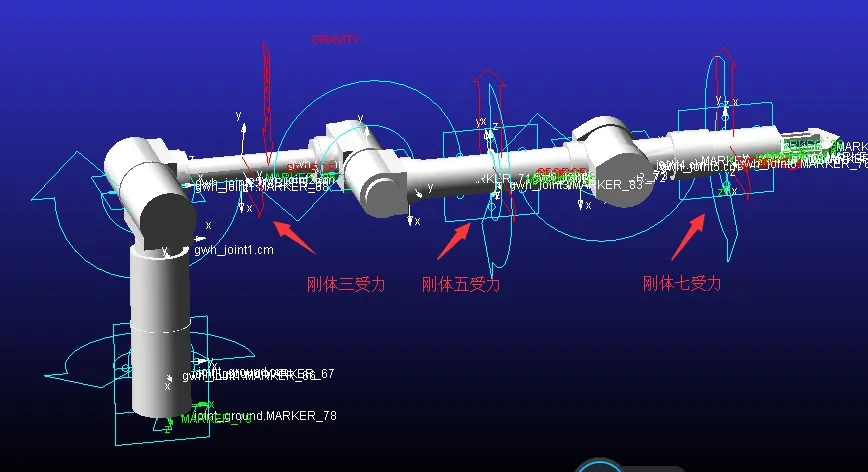
图4 六自由度二碰撞约束
假设在运动过程中,分别在第3刚体,第5刚体和第七刚体3个位置方向上分别增加一个方向与运动方向相反的力(转动方向或摆动方向),在1.001秒和1.002秒期间分别施加不同的力。
3.1 转动关节添加运动约束的碰撞辨识
1) 刚体7添加水平单点力各关节力矩如下:
首先,对每一个转动关节分别添加一个运动约束函数STEP(time,0,0,5,-9d)+STEP(time,0.5,0,4.5,0)+STEP(time,4.5,0,5,9d)函数,仅有在转动方向运动,观察各个关节的变化,在没有单点力情况下个点力矩如图5所示。
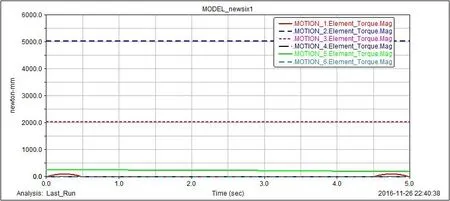
图5 六自由度二无碰撞各关节力矩曲线
再添加一个STEP(time,0,0,1,0)+STEP(time,1,0,1.01,3)+STEP(time,1.01,0,1.02,-3)+ST EP(time,1.02,0,5,0)函数的瞬时力,可以看见有明显的力度尖峰,如图6所示。

图6 仅转动关节运动时刻刚体7碰撞点各关节力矩曲线
通过仿真可以发现关节1有巨大的力矩变化,关节5也有一定的变化,而其他关节变化并不是非常明显。可以发现由于动力学的原因,刚体7突然增加的力矩使得几个受力相关点的力矩突然增大,反映到电机上就是电流的急剧增加。
由于机器人的迭代性,从刚体7向刚体1进行迭代,每个关节都会产生一定的力矩。通过分析可以得出关节2、关节3、关节4是因为动力学迭代性产生的力矩,幅值并不大。刚体7是受力点产生了一定的力矩实际当中并不会有如此大。而关节1是转动方向反向力会产生巨大作用力,通过力矩分析得到受力点为刚体7水平方向。
2)刚体5添加水平单点力各关节力矩如图7所示:
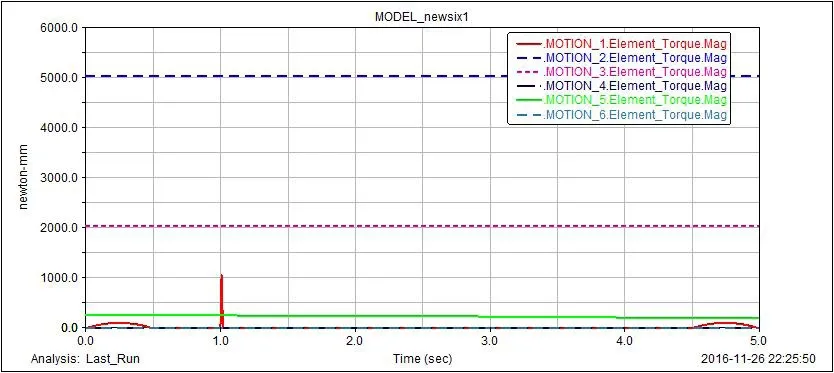
图7 仅转动关节运动时刻刚体5碰撞点各关节力矩曲线
通过分析可以得出关节2、关节3、关节4是因为动力学迭代性产生的力矩,幅值并不大。而关节1是转动方向直接反向力会产生巨大的反作用力,其他关节受力并不明显。所以通过力矩可以分析出来受力点为刚体5水平方向。
3.2 摆动关节添加运动约束的碰撞辨识
1)刚体7添加竖直单点力各关节力矩如下:
下面是对刚体5添加一个障碍物,相当于在刚体7上施加一个瞬时竖直方向的力,现在对每一个摆动关节添加一个STEP(time,0,0,5,-9d)+STEP(time,0.5,0,4.5,0)+STEP(time,4.5,0,5,9d)函数,在摆动方向运动,观察各个关节变化如图8所示。
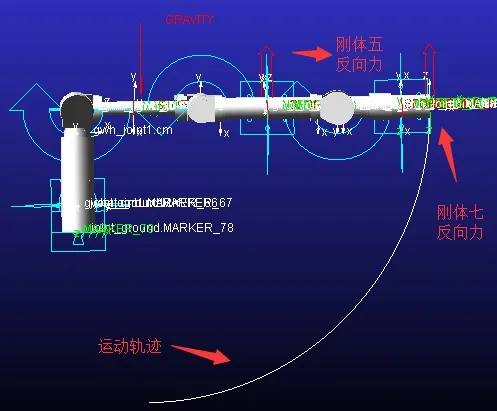
图8 仅摆动关节运动方向运动约束
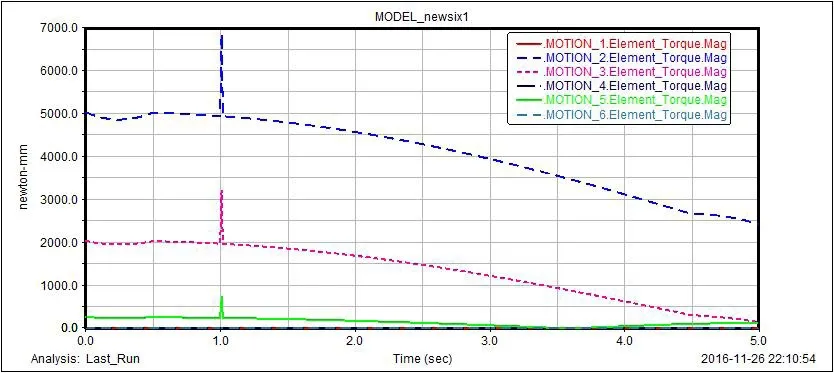
图9 仅摆动关节运动方向刚体7碰撞点各关节力矩曲线
通过分析可以得出关节1、关节4是因为动力学迭代性产生的力矩,幅值并不大,如图9所示。关节5由于是刚体7直接受力点产生了一定的力矩但是在实际当中并不会有如此大。而关节2,关节3,关节5是转动方向直接反向力会产生巨大的反作用力,所以通过力矩可以分析出来受力点为刚体7竖直方向受力。
2)刚体5添加竖直单点力各关节力矩如图10所示。

图10 仅摆动关节运动方向刚体5碰撞点各关节力矩曲线
通过分析可以得出关节1、关节4、关节5是因为动力学迭代性产生的力矩,幅值并不大。而关节2、关节3是摆动方向直接反向力会产生巨大的反作用力,其他关节受力并不明显。所以通过力矩可以分析出来受力点为刚体5竖直方向。
4 结论
通过仿真结果可知,基于电流环的机械臂避障方案是通过分析因受力变化的电流值,从而分析出机械臂所受力矩,判断机械臂所受障碍物的位置,以此为基础为机械臂提供避障方法。相较于以往通过视觉信息避障,此方案的优点在于无视觉传感器和力矩传感器也能够自我感知环境障碍物。水下机械臂工作在水下,环境未知,能见度低,本文技术方案为水下机械臂的轨迹规划提供有效的解决途径。
[1]高文斌,王洪光,姜勇,潘新安.模块化可重构机器人标定方法研究[J].机械工程学报,2013,49(17):92-100.
[2]吴文强,管贻生,朱海飞,苏满佳,李怀珠,周雪峰.面向任务的可重构模块化机器人构型设计[J].哈尔滨工业大学学报,2014,46(03):93-98.
[3]王肖锋,张明路,葛为民.可重构机器人动力学自动建模研究[J].农业机械学报,2015,46(12):355-361,377.
[4]PAREDIS C J J, KHOSLA P K. RMMS: reconfigurable modular manipulator system project[A].Proceedings of the 1997 IEEE International Conference on Robotics and Automation.Albuquerque.USA[C],1997:20-25.
[5]Chocron O,Bidaud P.Genetic design of 3D modular manipulators[A].Proceedings of the 1997 IEEE Inter-national Conference on Robotics and Automation[C].New Mexico,1997.223-228.
[6]魏延辉,赵杰,高延滨,蔡鹤皋.一种可重构机器人运动学求解方法[J].哈尔滨工业大学学报,2010,42(01):133-137.
[7]吴国魁.工业机器人的碰撞辨识与安全控制[D].福州大学.2014,06.
[8]胡化.机器人安全性工程研究综述[J].中国机械工程.2004,15(2):370-375.
[9]姜勇,王洪光,潘新安,余岑,何能.模块化可重构机器人的构形在线自主辨识[J].机械工程学报,2011,47(15):17-24.
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
交通科技与管理(2022年9期)2022-05-24
山东交通科技(2020年2期)2020-08-13
中学生数理化·八年级物理人教版(2018年5期)2018-06-21
北京航空航天大学学报(2017年1期)2017-11-24
制造技术与机床(2017年3期)2017-06-23
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
