基于图像处理的喷嘴雾化粒度识别测量研究∗
2018-03-20 07:06蒋红海何邦华袁锐波
计算机与数字工程 2018年2期
刘 振 蒋红海何邦华 唐 军 刘 泽 袁锐波 周 冰
(1.昆明理工大学机电工程学院 昆明 650500)(2.云南中烟工业有限责任公司技术中心 昆明 650032)
1 引言
烟叶制丝过程中,加料的均匀性是加料雾化过程的一个重要评价指标,与提升烟叶的品质呈正相关[1]。加料雾化[2]粒度直接影响着烟叶的吸收料液的均匀性。本文基于数字化图像处理技术[3]精密测量液雾粒度。图像处理技术已经成为非接触测量[4]的主要手段。文献[5]是通过图像的前期处理把单次曝光的粒子像点等效成圆形像点,然后把像素数转化成实际尺寸[6]。目前刘海龙等[7]采用模糊测量法测量气液旋风分离器液滴粒度。梁永坤等[8]使用快速相机并借助图像处理技术研究液液雾化特性,得出在水流量变化时,形成液滴粒径的范围及变化趋势。本文基于数字化图像处理技术搭建图像采集实验平台,图像处理软件Halcon和高速摄像机通讯,实时采集喷嘴轴向和轴向截面图像并测量液雾粒度。
2 图像采集平台的搭建
2.1 图像采集平台
图像采集平台如图1所示,该系统主要由高速摄像机、自由空间、加料喷嘴、背光源、PC、激光发射器等组成。为了更好地研究喷嘴的雾化效果,需要在解耦状态下研究喷嘴液相流的雾化机理,因此要搭建一个喷嘴自由雾化的平台。根据料液喷嘴出口直径为3.8mm,喷嘴的空间扩散度及雾化体积且在保证雾化效果受自由空间边界影响情况下,最终确定长度为2.4m,宽度与高度为1.5m的自由空间并在1.5m×1.5m端沿自由空间中心轴线开口,以便放置喷嘴。将喷嘴轴向区域划分区间,高速摄像机选用型号为FASTCAMMiniUX50/100,可以达到100万个像素、160000fps的性能。本项目采用的大功率激光光源是12V大功率调焦蓝光激光模组,波长为450nm,功率可达10W,可提供0.5mm~5mm的激光束及扇形光面。
图1 图像采集平台
2.2 实验内容
调整喷嘴角度为0°,料液温度45℃、55℃、65℃,气体压力0.25MPa、0.35MPa、0.45MPa,料液流量为20kg/h,30kg/h,40kg/h等工况下做正交实验。在2.4m×1.5m平面划分了等分区域,实验分区采集轴向和截面激光图像。实时采集A、B、D区域轴向和轴向激光截面图像。为了获得通过喷嘴轴线铅锤面上的液滴状态,需要在此铅锤面上布置对焦标定板,对焦标定板除了使高速相机焦点对准此铅垂面外,还要进一步达到尺寸标定的目的,即换算像素尺寸与物理尺寸之间的关系。如图2所示。
3 测量方法
本文使用图像处理软件Halcon开发的测量算法主要分为:图像采集、特征识别、测量粒度。该测量方法流程如图3所示。
图2 采集图像区域

图3 测量流程图
3.1 图像采集
高速摄像机通过以太网连接和PC实时通讯,采集图像并保存到相应路径下。图像会有一定的畸变[9],使用Photron软件对相机进行调焦和标定[10]。相机标定界面如图4所示。标定板外形尺寸50mm×50mm,刻度总长30mm×30mm,刻度精度1.0μm。通过相机监测软件软件(PFV)调整曝光率,A区、B区、D区对应的轴向图像曝光率为1/5000s、1/16000s、1/8000s,激光截面图像曝光率为1/2000s,1/1500s,1/500s。
3.2 图像处理
3.2.1 图像预处理

图4 高速相机标定界面
首先把原图像转化成灰度图像。由于图像在获取或传输过程中,成像传感器受到外部环境的干扰或者自身的性能发生改变便产生了数字图像噪声,需要对图像平滑去噪处理。中值滤波器属于非线性数字滤波器,经常被用于降低减少图像中的噪声。它是把该像素邻域中的像素点灰度中值替代该像素的灰度值,即

通过对在(x,y)像素进行中值计算,将其设定为图像的灰度值,可有效地降低减少图像噪声。背光源和激光截面图像采用的为3×3的中值滤波算子模板滤波,能达到预期效果。
为了把液雾特征和背景分开,识别液雾粒子,在ROI区域使用阈值分割识别液雾粒子。阈值分割是利用灰度频率分布信息将图像f分割成不相交的非空子集R1,R2,…Rm,并且每个子集内的像素灰度级分布在一个连续的灰度段。本文阈值分割表示为

其式中T为二值化阈值,f(x,y)为图像像素点阵中(x,y)点的灰度,p(x,y)为该点邻域的某种局部性质如连通性。
由于液雾粒子会有少数粘连,本文利用数学形态学对粘连液雾进行分割。数学基本形态学运算如下:设A、C等符号表示灰度图像。
1)膨胀运算
A被B膨胀,记为C=A⊕B,运算结果为

其中 b(iˇ,j)表示对所有的 B(i,j)取最大值。
2)腐蚀运算
A被B腐蚀,记为C=AΘB,运算结果为

其中b(i^,j)表示对所有的 B(i,j)取最小值。
3)开操作
用B对A进行开运算,记为C=A◦B,运算结果为

4)闭操作
用A对B进行闭运算,记为C=A·B,运算结果为

预处理分割结果如图5所示。
图5 分割特征液雾
3.2.2 液雾特征识别与填充
特征区域的面积、紧密度(Compachtness)和中心坐标是轴向液雾粒子图像通过图像预处理后得出的重要特征,是液雾粒子识别的重要参数。面积是预处理后得到不同的区域,然后将这些区域连通,得到的连通区域总数。面积是反映图像中目标区域的最常用特征之一。对于一个图像区域R,其面积A表示为

紧密度是面积和周长之间的比值,通过比值的大小来确定目标物体区域形状的复杂程度特征量,其公式定义如下:

式中:C表示紧密度;A表示区域面积;S表示区域周长。
紧密度的值域为[0,1]。
粒子中心坐标一般是离散型的,它是对目标物体区域内的像素点的位置坐标求取平均值。粒子中心坐标如下:

通过上述特征参数识别得到的单个液雾粒子可能存在空洞,本文要标记特征粒子连通区域并填充空洞。如图6所示。

图6 特征粒子识别与填充
3.3 平均粒径测量
3.3.1 液雾轴向粒度测量
由于高速摄像机像素较高,采集到的粒子近似于圆形,可将粒子像点等效成圆形。每个区域提取液雾粒子个数至少为3510个。液雾轴向测量采用的是液雾粒度平均半径:1)计算液雾粒子特征的最小外接圆半径;2)计算相应液雾粒子内切圆半径;3)计算其平均半径。
该测量方法把提取出的液雾粒子的像素数转化为实际尺寸。实际值长度尺寸单位(mm)与像素单位(pixel)之间标定系数:

液雾粒度计算公式:

A区标定系数k=0.0902mm/pixel,B区标定系数k=0.0645mm/pixel,D区标定系数k=0.0580mm/pixel。
3.3.2 液雾激光截面粒度测量
本方法利用料液的光散射和成像特性,激光光源平面与被测料液液雾轴向运动方向平行。通过调节相机曝光时间,采集液雾轨迹序列图像。对识别出来的液雾特征并计算特征粒子最小外接矩形。选择矩形较短边为特征粒子的粒度,如图7所示。
液雾粒度计算公式:

A区标定系数k=0.0950mm/pixel,B区标定系数k=0.1091mm/pixel,D区标定系数k=0.1410mm/pixel。
图7 激光截面粒度测量
4 测量方法验证
在气体压力为0.25MPa工况下,背光源轴向与激光截面两种方法测量平均粒度如图8所示,误差计算公式为
X(j)为轴向平均粒度,Y(j)为截面平均粒度。计算误差约为3.5%,验证了测量方法的有效性。

图8 轴向与截面平均粒度
5 测量结果及分析

图9 不同区域液雾粒径分布
各个工况下,随着液雾向前推进,液雾粒度会变小,液雾粒度分布基本符合正态分布(如图9所示)。如图10,在相同气体压力和温度下,随着料液流量增大,粒度分布累积曲线斜率越小,平均粒径越大。在55℃-0.35MPa-20kg/h工况下,粒度分布变化最快。如图11,在相同流量下,随着气压的增大,粒度分布曲线变化越快。在55℃-0.45MPa-30kg/h工况下,粒度分布变化最快。料液温度(粘度)对粒度分布影响较小。
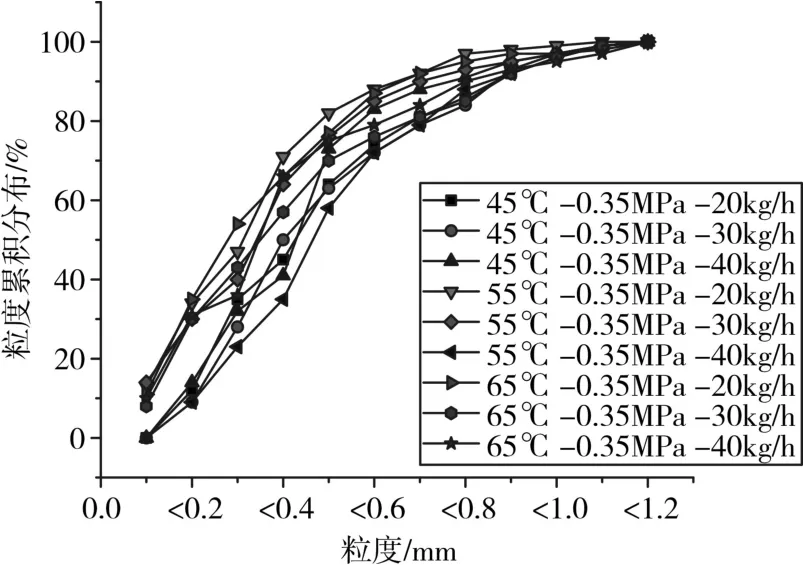
图10 相同气压和温度
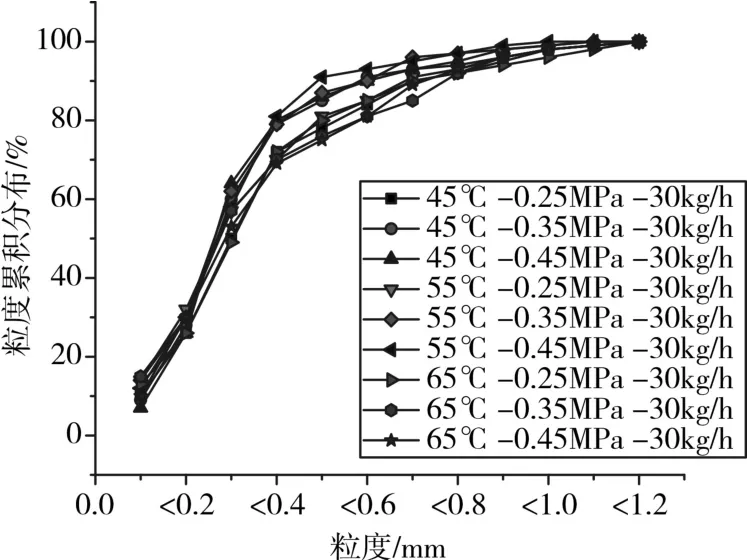
图11 相同料液流量
6 结语
本图像采集系统能实时采集图像并用图像处理软件halcon开发识别并测量液雾粒度程序。两种方法测量误差为3.5%,验证了测量方法的有效性和可行性。测量结果可为喷嘴雾化的数值模拟验证提供可靠的数据。
[1]陈良元.烟草生产工艺技术[M].郑州:河南科学技术出版社,2002:19-22.
CHEN Liangyuan.Tobacco production technology[M].Zhengzhou:Henan science and Technology Press,2002:19-22.
[2]曹建明.液体喷雾学[M].北京:机械工业出版社,2005:168-192.
CAO Jianming.Liquid Sprays[M].Beijing:Machinery In⁃dustry Press,2005:168-192
[3]史春建,邱白晶,汤伯敏.基于高速图像的雾滴尺寸分布统计与运动分析[J].农业机械学报,2006,37(5):63-66.
SHI Chunjian,ZHOUBaijing,TANG Bomin.Statistical analysis and motion analysis of droplet size distribution based on high speed image[J].Journal of agricultural ma⁃chinery,2006,37(5):63-66.
[4]毛靖儒,施红辉,王璧玉.气液两相流中雾滴尺寸的测量[J].汽轮机技术,1990,32(3):49-55.
MAO Jingru,SHI Honghui,WANG Biyu.Measurement of droplet size in gas-liquid two-phase flow[J].Steam turbine technology,1990,32(3):49-55.
[5]黄成杰,吴志军,李治龙.粒子图像速度粒度同场测量基础与实验验证[J].吉林大学学报(工学版),2010,40(4):1106-1111.
HUANG Chengjie,WU Zhijun,LI Zhilong.Fundamentals of particle velocity and size measurement in same field and its experimental validation[J].Jilin University(Engi⁃neeringand TechnologyEdition),2010,40(4):1106-1111.
[6]杜永成,杨立,刘天.基于数字粒子图像测速的水雾粒径测量算法及实验[J].中国光学,2013,6(3):409-414.
DU Yongcheng,YANG Li,LIU Tian.Algorithm and exper⁃iment of particle size measurement based on digital parti⁃cle image velocimetry[J].Chinese Optics,2013,6(3):409-414.
[7]刘海龙,陈孝震,蔡小舒.基于轨迹图像的气液旋风分离器液滴粒度、浓度、速度的在线测量[J].化工学报,2012,63(6):1729-1734.
LIU Hailong,CHEN Xiaozhen,CAI Xiaoshu.On line mea⁃surement of droplet size,concentration and velocity of gas-liquid cyclone separator based on trajectory image[J].Journal of Chemical Engineering,2012,63(6):1729-1734.
[8]梁永坤,彭正标,袁竹林.液液雾化特性与粒径分布规律[J].化工学报,2007,58(8):1935-1942.
LIANG Yongkun,PENG Zhengbiao,YUAN Zhulin.Char⁃acteristics of liquid atomization and particle size distribu⁃tion[J].Journal of Chemical Engineering,2007,58(8):1935-1942.
[9]Carsten Steger,Markus Ulrich,Christian Wiedemann.机器视觉算法与应用[M].杨少荣等译.北京:清华大学出版社,2008:257-261.
Carsten Steger,Markus Ulrich,Christian Wiedemann.Ma⁃chine vision algorithms and Applications[M].Beijing:Ts⁃inghua University Press,2008:257-261.
[10]赵小松,张宏伟,张国雄,等.摄像机标定技术的研究[J].机械工程学报,2002,38(3):149-151.
ZHAO Xiaosong,ZHANG Hongwei,ZHANG Guoxiong,et al.Research on camera calibration technology[J].Journal of Mechanical Engineering,2002,38(3):149-151.
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
汽车电器(2021年8期)2021-08-24
粉末冶金技术(2021年3期)2021-07-28
南方农机(2021年12期)2021-07-08
小型微型计算机系统(2020年10期)2020-10-21
汽车维修与保养(2020年11期)2020-06-09
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
智富时代(2019年2期)2019-04-18