
某工程车后门锁紧装置的匹配设计
2018-03-20 00:53:30王广亮
汽车实用技术 2018年4期
王广亮
(安徽江淮汽车股份有限公司轻型车研究所,安徽 合肥 230000)
前言
随着国民经济的迅速发展,国内需求不断扩大,尤其是我国近些年对基础设施加大投资以来,工程车市场取得了飞速发展,随着制造业的创新,不断将新的设计方法应用于工程车上,大大提高了工程车的设计效率,缩短了生产周期。
工程车是利用本车发动机动力驱动液压举升机构,将其车厢倾斜一定角度卸货,并依靠车厢自重使其自动复位的特种汽车。后门锁紧机构是工程车的重要组成部分,通过对该机构的设计,可以实现货箱后门在货箱卸货和复位过程中在相应的位置实现开启和关闭。
1 后门锁紧机构结构
后门锁紧机构是工程车特有的结构,它是配合货箱卸货和保证货箱在非卸货状态时后门不发生运动的重要零部件。而后门锁紧机构根据工程车货箱的分类也分为运输类和工程类两种,这里介绍的是配合工程类货箱使用的后门锁紧机构。
如图1所示,工程车的工程类货箱的后门锁紧机构选用的是链条式结构。如图2所示,它分别由锁钩座总成,锁钩座支架,链条,销轴、开口销、平垫圈组合使用,调节锁杆,缓冲块,螺母和大平垫等件组合而成。

图1 链条式后门锁紧机构
2 后门锁紧机构安装位置
锁紧机构是配合货箱翻转机构进行工作的,所以一部分要连接货箱,一部分要连接车架及相应结构。由图3可知,锁钩座总成和锁钩座支架是用螺栓固定在货箱上,而调节锁杆,缓冲块,螺母等都是固定在车架上。而实际设计中,由于车架与其他零部件存在干涉问题,所以有时也会把调节锁杆等件安装在后防护支架上。链条则是两组零件之间的连接件。
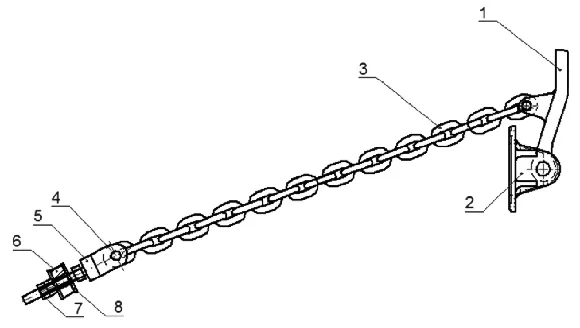
图2 链条式后门锁紧机构二维图

图3 后门锁紧机构装置图
3 后门锁紧机构工作原理
行驶状态,货箱底板落在车架上,而货箱后门锁紧机构中的链条拉紧锁钩座总成,使其处于锁止状态,在这种状态下,不论车辆处于何种路况,后门都不会打开。该锁紧机构无任何弹性元件,所以货箱后门的开启是依靠卸载货物时货物对后门的挤压力来实现的。在工程车卸货的过程中,货物会一直给后门一个向后的力,后门锁紧机构限制着后门向后运动。当达到后门完全开启的角度之后,后门与锁紧机构分开,后门受到货物的力向后摆动。而当货箱再次贴合车架时,锁钩与后门接合,从而达到锁紧货厢后门的目的。
4 后门锁紧机构配合设计
4.1 后门锁紧机构设计要求
根据实际使用需求,得出设计须满足如下要求:
a.在行车中锁止可靠,不得锁止失效,造成意外打开。
b.货箱后门锁紧机构应保证后门在车箱举升至 6°~10°时完全开启,要求开启灵活。
c.货箱降落时,货箱后门要先于后锁钩回位。
d.适应工程车的使用工况,要求各零部件能坚固耐用,不易损坏。
4.2 后门锁紧机构配合设计
1)设计重点。根据链条式后门锁紧机构中各零部件结构和布置位置,对5.1中的设计要求进行简单分析:因为此链条式后门锁紧机构已在其他车型上得到验证,所以零部件的耐久性可以保证;锁钩座总成伸出部位与后门后平面接触,未举升时起到了锁紧的作用,所以a项符合要求;货箱举升多少度时后门能够完全开启由锁紧机构和后门的相对位置决定,所以需要重新计算;货箱降落时会不会出现锁钩座总成与后门动态干涉也得重新计算得出。最终设计要求中a项和d项可以满足要求而b项和c项需要校核。
2)货箱后门完全开启时锁钩座总成旋转的角度a。后门锁紧机构各零件的安装位置如图3所示。后门锁紧机构在货箱举升过程中会限制后门开启。在后门正好完全开启时,此时的后门和锁钩座总成正好分离,所以找到这个临界点是首要的。因为货箱后门和锁钩座总成和锁钩座支架都是固定在货箱上的,所以他俩之间的变化都是以货箱为基础的。而货箱后门的运动轨迹是后门以后门铰链销的中心为圆心做逆时针转动;而锁钩座总成的运动轨迹则是以和锁钩座支架连接中心为圆心做顺时针运动。所以以后门铰链销中心为圆心,后门总成距离此圆心最远距离为半径做圆1,圆1的面积即为货箱后门所能扫略的面积。以锁钩座总成和锁钩座支架连接中心为圆心,锁钩座总成距离圆心最远距离为半径做圆2,圆2的面积即为锁钩座所能扫略的面积。如图4所示,两圆相交点所在的位置即为货箱后门完全开启时锁钩座总成所在的位置,而此状态下与最初状态下的锁钩座总成的夹角即为角度a。

图4 后门完全开启时锁钩座总成旋转的角度a
3)后门完全开启时举升角度b的计算。因为在后门完全开启前锁钩座总成都在限制后门,即后门一直都会给它向后的一个力,所以链条在这过程中一直都是拉紧的状态,即可以简化成一跟直杆。此时以调节锁杆与链条连接中心为圆心,圆心到未举升时锁钩座总成与链条连接中心的距离为半径画圆 3,则货箱后门在完全开启之前,锁钩座总成与链条连接中心会在圆3上运动。将货箱后门完全开启时锁钩座总成的位置装配到整车中,连接它与链条连接中心点和货箱翻转中心点,并以此距离为半径r,以货箱翻转中心为圆心画圆4。因为锁钩座总成是固定在货箱上,而且货箱是绕着货箱翻转中心旋转的,所以在后门没有完全开启的过程中不管举升角度为多少,角度a和半径r都是定值。综上说明了货箱翻转到后门完全开启时锁钩座总成的位置与链条连接中心点在圆4上。结合圆3和圆4后发现两个圆的交点即为实际上此款货箱的后门完全开启时锁钩座总成的位置与链条连接中心点。连接此点和货箱翻转中心点画一条线,此线和未举升时货箱后门完全开启时锁钩座总成与链条连接中心和货箱翻转中心点的连线的夹角即为货箱翻转的角度b。求解过程如图5所示。

图5 后门完全开启时举升角度b的计算
4)货箱降落时,锁钩座总成与货箱后门的动态校核。在货箱降落时,因为没有货物的存在,后门没有向后的作用力,所以在降落过程中,它只受重力。货箱翻转过程,后门总成受后门铰链销的约束,只能绕销旋转,因自身结构在重力作用下会和竖直方向有个夹角,夹角为角度 c,也就是在货箱翻转角度为c时,后门和货箱整体才分离、贴合。因为整车姿态角要求在0.5-1.5°之间,一直为正,考虑整车姿态角的存在,货箱为空载状态时,后门与货箱整体分离时货箱翻转的角度为角度c加上姿态角。所以只要角度c > 角度b即可保证铰链座总成与货箱后门不会发生动态干涉。
求解角度c时应用了NX的运动仿真功能。NX运动仿真模块(NX/motion simulation)是NX仿真中的一个模块,它能对任何二维或三维机构进行复杂的运动学仿真、动力分析和静力分析。通过NX的三维建模功能建立一个三维实体模型,利用运动仿真模块的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间建立一定的连接关系即可建立一个运动仿真模型。NX运动仿真模块可以对运动机构进行大量的装配分析工作、运动和理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。

图6 夹角c的求解

图7 某工程车后门锁紧机构三维校核
这里我们应用运动仿真模块的重力功能对后门在只能绕后门铰链销旋转的约束下进行动力学分析。对后门铰链销的中心进行约束并释放X方向的旋转自由度,让货箱后门在重力的情况下自由摆动,最终后门会静止成一个状态,此状态即为货箱后门只释放绕销的旋转约束后的自由静止状态,后门平面与竖直Z方向的夹角即为角度c。如图6所示。
5 总结
图6显示货箱在降落时,货箱后门释放绕销的旋转约束后,后门平面与竖直Z方向的夹角为16.3°,大于9.8°,不会出现动态干涉,符合设计要求中的c项要求。
应用以上的计算方法并结合此款工程车各零部件的实际参数,最终确定后门锁紧机构的各个参数和具体的布置位置。如图7所示,结合此车参数求出货箱在翻转9.8°时货箱后门能够完全脱离后门锁紧机构的限制,后门完全打开,度数也符合后门锁紧机构设计要求中的b项要求。
综合以上分析,此参数下的后门锁紧机构符合设计要求,可以使用。设计过程中各参数数值如表1所示。

表1 设计过程中各参数数值
后门锁紧装置的最终二维装置图如图8所示。
6 结论
本文简介了一种工程车后门锁紧机构的匹配设计方法。沿用成熟锁紧机构的结构可以保证零部件使用,通过对后门开启和关闭过程的校核,达到了设计和使用的要求,匹配设计完成。本文的设计方法不能适应所有后门锁紧装置的设计,但提供了一种方法,望能对读者有一定的参考价值。
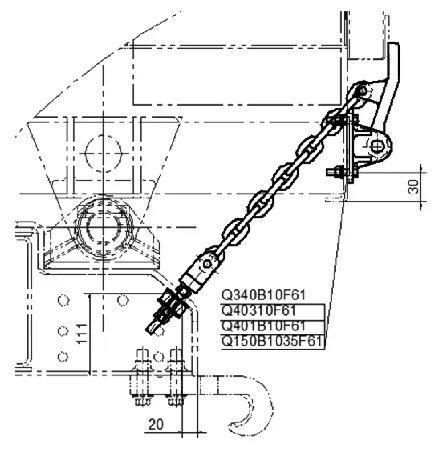
图8 某工程车后门锁紧机构二维装置图
[1] 梅国兴.基于Pro/E的自卸车锁紧机构的设计,北京汽车,2012.
[2] 郝建根,袁光涛.矿用自卸车货箱后门启闭机构的设计探析,专用汽车与配件,2012.6.
[3] 胡志国.车箱可卸式垃圾车后门锁紧机构改进,专用汽车,2006.9.
猜你喜欢
小学科学(学生版)(2018年11期)2018-11-22 07:12:22
电子制作(2018年18期)2018-11-14 01:47:56
创新作文(1-2年级)(2017年11期)2018-04-17 01:48:18
科技创新与应用(2017年28期)2017-09-22 14:51:21
数理化解题研究(2017年6期)2017-04-17 07:01:28
创新作文(小学版)(2017年31期)2017-04-09 06:13:26
发明与创新(2016年30期)2016-08-22 11:35:24
作文·初中版(2015年10期)2015-10-26 16:42:10
汽车维修与保养(2015年2期)2015-04-17 01:30:32
汽车维护与修理(2015年7期)2015-02-28 12:18:04
