基于m iniLiDAR的山地大比例尺地形图测绘应用研究
2018-03-19 06:00:23张福坤颜培胜杨智翔
水利规划与设计 2018年2期
奚 歌,张福坤,颜培胜,杨智翔
(1.中水北方勘测设计研究有限责任公司,天津 300222;2.江西省水利规划设计研究院,江西 南昌 330000)
机载激光雷达(LiDAR)系统起源于美国和加拿大,是一种集全球导航卫星系统(GNSS)、惯导系统(IMU)、激光测距系统于一体的主动式空间测量系统。目前激光雷达数据主要应用于水利、林业、电力和城市三维建模等领域,而无人机载miniLi-DAR以其机动灵活、低成本和高精度被应用到大比例尺高精度测绘、电力巡线和文物保护等诸多领域。2013年高永红等在黄河流域进行了LiDAR点云数据处理流程试验研究,取得了良好的试验效果[1]。2015年刘万华等分别以丘陵地形和山地地形作为试验样地,进行机载LiDAR数据测绘大比例尺地形图的研究,对测图成果精度进行的系统性分析表明,试验要素精度和DEM精度均可达到1∶2000测图的要求[2]。
本文利用扫描鹰HS-300小型机载miniLiDAR和CCD相机对某山地库区进行1∶1000地形图测绘,结果显示点云和DEM高程中误差均在10cm以内,测绘产品满足设计精度要求且缩短了工期、大幅降低了测图成本,对其它激光雷达测图应用具有一定的参考意义。
1 测区概况
测区属江西省境内,位于江西西部罗霄山脉中段。全境自南、北两侧向中部倾斜,形成不对称的盆地地貌特征。地貌受构造控制明显,加之河流切割强烈,构成以山地、丘陵为主的地形。测区山地地形特征明显,且绝大部分地区没有道路通达。气候属亚热带湿润性季风气候,雨量充沛,气候温和,光照充足,春秋短,冬夏长,霜期短,生产季长。因受季风影响,降水和温度变化大,容易形成干旱、洪涝、酷热、冰冻等灾害。为完成该区的相关水库工程建设,需要开展前期地形图测绘工作,测图面积约2km2。
2 技术方案
技术流程主要分为LiDAR数据采集和内业数据处理两大步骤,如图1所示。在申请空域和收集测区气象资料的基础上,现场踏勘确定起降场地,规划航线;基于工期计划,充分考虑地形要素,利用HS-300低空激光扫描测图系统(无人机平台为DJI经纬 M600 Pro,激光雷达为 RIEGL mini VUX-1UAV)采集数据并进行数据预处理,检查数据采集范围是否符合设计,是否存在航摄漏洞和航线间拼接精度;外业采集一定数量的检查点,以便检查点云精度;采用TerraSolid软件对点云数据进行坐标转换、点云滤波等,分离出地面点与非地面点,利用地面点生成DEM、提取出等高线和高程点,结合0.1m分辨率影像上矢量化的地物信息进行地形图制作。

2.1 技术指标和规格
平面坐标采用1954北京坐标系,高斯投影3°分带,中央子午线为114°。高程基准采用1985国家高程基准。
2.1.1 地形图精度指标
依据SL197-2013《水利水电工程测量规范》要求,相关精度指标应满足表1要求。

表1 地形图精度要求
2.1.2 DEM精度指标
依据SL197-2013要求,DEM具体精度指标应满足表2要求。

表2 DEM精度要求
2.1.3 点云精度指标
依据SL197-2013要求,点云精度指标应满足表3要求。

表3 点云精度要求
2.2 LiDAR数据采集
2.2.1 地面基站布设
在空域可用、气象和起降场地条件良好的基础上,航摄实施前应先选好基站点。本文所选基站点附近视野开阔,地面稳固,点位目标显著,视场周围10°以上没有障碍物遮挡,同时站点远离大功率无线电发射源、高压输电线和大面积水域。地面基站GPS在启动机载LiDAR设备前30min开机,关闭LiDAR设备30min后关机,在此期间,基站运行状况良好。
2.2.2 机载m iniLiDAR航摄
本文充分考虑地形要素,在满足技术要求的基础上采用扫描鹰HS-300低空激光扫描测图系统进行了测区激光雷达点云数据的采集。基于前期踏勘基础上,现场规划航线,测图面积为2km2,无人机飞行高度为200m左右,分五个架次共1.5h完成测区点云数据的获取,雷达实际扫描覆盖面积约为5km2。
2.3 内业数据处理
2.3.1 机载m iniLiDAR数据预处理
获取的原始数据共分为两部分:轨迹数据和激光点云数据。数据预处理的主要工作为轨迹线解算、激光点云数据解算和航带拼接[3]。轨迹数据利用GNSS基准站观测数据,采用POSPAC软件对飞行的轨迹姿态数据进行后处理差分解算,平均航迹线解算精度为0.01m;运用RiPROCESS对各航带数据进行分别解算、导出和拼接,如图2所示。由于山区气流较为紊乱,导致飞机平台不稳定,航迹姿态解算精度有所降低,因此,各航带间的拼接误差相比平原地区略大,经过对各航带数据的拼接处理,各航带间的拼接中误差整体平均在0.05m左右。
2.3.2 点云数据处理
本文平面坐标采用1954北京坐标系,高程基准采用1985国家高程基准。利用测区控制点成果求取了WGS 84和北京54坐标系之间的7个转换参数,使用TerraSolid软件进行数据处理,对点云数据进行坐标转换。点云数据分块后对点云数据进行分类处理。
首先是噪声点滤波,将明显低于地面的点或点群(低点)和明显高于地表目标的点或点群(空中点)以及移动地物点定义为噪声点。在进行地面点分类前,先将这类点分离出来。其次是点云自动分类,利用基于反射强度、回波次数、地物形状等的算法或算法组合,对点云数据进行自动分类[4]。裸露地表处有且只有一次回波,此次回波对应的反射点即为地面点。植被覆盖区域可能对应多次回波,正常的地面点是最后一次回波对应的反射点。相对于地物点,地面点的高程是最低的。从较低的激光点中提取初始地表面;基于初始地表面,设置地面坡度阈值进行迭代运算,直至找到合理的地面。最后是人工编辑分类结果,结合正射影像采用人工手动拉取断面的方法,人工对分类错误的点重新进行了分类。人工分类前后对比效果如图3所示。

图2 测区各航带拼接图

图3 人工分类前后对比示意图
2.3.3 制作DEM和地形图
(1)基于ArcGIS软件,利用点云分类后的所有地面点数据生成栅格文件,设置DEM格网间距为1m,制作完成DEM数据。
(2)地形图要素的采集包括地貌和地物两部分[5]。地貌要素的采集主要是利用点云精分数据提取出地面点,从地面点数据中分离出等高线关键点,利用等高线关键点生成的模型,进而生成等高线和高程点数据。
地物要素以采集的同时期0.1m分辨率正射影像图为基础,以外业调绘、点云分类成果为辅,编辑完成1∶1000地形图地物要素的采集。
地物、地貌符号以及注记严格执行 GB/T20257.1-2007《国家基本比例尺地图图式第1部分:1∶500 1∶1000 1∶2000地形图图式》的要求。地物框架要素、地貌要素符号的编辑参照调绘片,按测图定位表示。地物测绘采用了内业判绘和外业调绘相结合的测绘方法。利用正射影像套合点云分类成果查找电线杆等变化地物,并进行标注。采集时,严格按照调绘片进行采集,对内业判不清楚和外业漏调的内容加以圈注,由外业人员进行检查核对。测绘地物、地貌元素做到无错漏、不变形、不移位。可结合分类点云对一些特征地物(如建筑物)的轮廓线进行采集。沟渠、河道宽度按照图式要求采集了单线、双线。对防洪堤、堤坝进行了准确测绘,并按照相应符号进行表示。植被根据影像采集图斑轮廓线。
外业调绘并准确合理的表示各种地物、地貌,不完整的补测完整,不合理的修改合理[6]。对内业判读不清楚的问题,外业均进行了处理和解决。并做到了描绘清楚,地形图符号运用恰当,注记准确无误。
地形图编辑主要包括地形要素编辑、居民地编辑、点状地物编辑、交通编辑、等高线编辑、植被编辑、注记编辑等。按照相关技术规定,对点云生成的等高线、高程点、补测地物进行编辑,按照调绘成果对新增地物进行了编辑,做到了图面清晰易读,主次分明,取舍恰当,合理地显示各种地理要素。
3 精度分析
项目运行期间,从航摄设计到航摄实施、点云数据处理、地形图测量,每个环节均按照设计要求进行,并进行了必要的过程检测工作,所有资料均进行两级检查,各项指标均符合设计要求。
3.1 点云精度评定
依据21个有效检查点数据,通过点云数据处理软件TerraScan中的“Output ControlReport”对点云高程进行精度评价。具体见表4、5,点云高程精度满足测图要求。
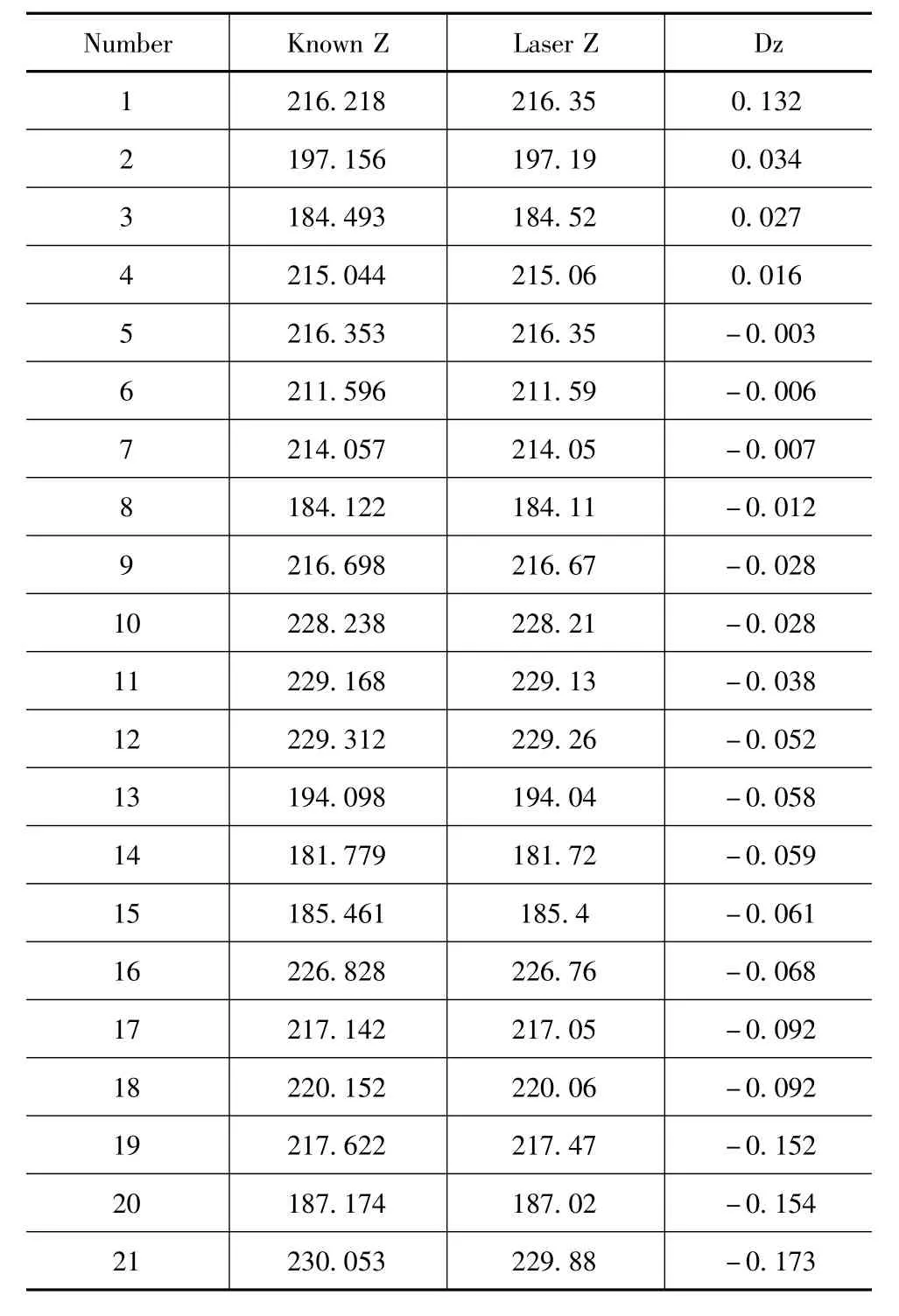
表4 检查点与对应位置点云高程统计表 单位:m
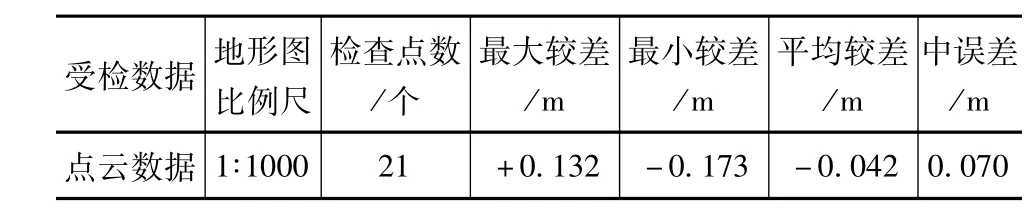
表5 点云高程精度统计表
3.2 地形图精度评定
(1)根据外业实测的检查点中房角以及电线杆等特征检查点以及部分像控点检查地形图平面精度。统计见表6。

表6 地形图平面精度统计表
(2)地形图高程精度主要包括图幅高程注记点精度与图幅等高线精度,可以参照点云高程精度统计。
综上所述,地形图的平面坐标精度和高程精度均达到规范要求。
3.3 数字高程模型(DEM)精度评定
DEM是通过点云成果生成的,筛除电线杆和房角等非地面高程外业检查点,选取有效地面检查点共18个,提取相应位置的18个检查点对应DEM高程,将外业实测检查点高程与对应DEM点高程进行对比分析,见表7、8。

表7 检查点与对应位置DEM高程统计表 单位:m
依据《测绘成果质量检查与验收》相关规定,对整个项目区进行检查,检查结果全部符合规范要求,能够真实反应本次测图精度。
4 结论
本文主要讨论了运用无人机载LiDAR进行山地库区1∶1000地形图测绘的实施过程及可靠性,结果表明其产品精度远大于设计规范要求,完全可以满足工程生产的实际需求,且可以应用到更大比例尺地形图测绘。无人机载miniLiDAR测图系统具有投入小、成图效率高和数据精度高等优势[7],降低了三维激光扫描测图的应用门槛,使一些投入较小的工程项目也能运用此套测图系统,高效经济地为工程项目提供准确可靠的测绘产品。

表8 DEM高程精度统计表
[1]高永红,韩少红.LiDAR点云数据在河道三维地形数据获取中的应用[J].测绘技术装备,2013,15(04):55-57.
[2]刘万华,刘超祥,原野.基于机载LiDAR数据测绘大比例尺地形图的研究与应用——以山地城市为例[J].城市勘测,2015(02):9-12.
[3]熊登亮,柯尊杰,陈舫益,等.机载LiDAR技术在测制城市1∶1000地形图中的应用[J].勘察科学技术,2015(01):44-46+58.
[4]王举.基于激光扫描技术的水库大坝三维变形动态监测方法研究[D].郑州大学,2015.
[5]孙洋.无人机遥感技术在水土保持监测中的应用[J].水利规划与设计,2017(06):89-92.
[6]王永亮.新时期3S技术在水文监测中的作用初探[J].水利技术监督,2017,25(01):30-31+137.
[7]梁东业.LiDAR技术及其在水利中的应用研究[D].长江科学院,2010.
猜你喜欢
计算机系统应用(2022年4期)2022-05-10 08:41:10
天津医科大学学报(2021年4期)2021-08-21 02:14:52
西部交通科技(2021年9期)2021-01-11 12:55:36
当代陕西(2020年23期)2021-01-07 09:24:44
国际呼吸杂志(2019年4期)2019-03-12 01:08:18
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
中国房地产业(2016年2期)2016-03-01 01:25:35
现代计算机(2015年31期)2015-09-28 05:31:51