基于地面三维激光扫描及VR技术的BIM工程应用研究
2018-03-19 06:00王帅,王彤
水利规划与设计 2018年2期
王 帅,王 彤
(中水北方勘测设计研究有限责任公司数字工程中心,天津 300222)
地面三维激光扫描技术是一种以激光测距方式快速获取大量测点三维坐标的测量技术,又称Li-DAR,能快速、连续、自动的获取目标物体表面三维数据,通过相应算法可以依据这些数据重建高精度的三维模型[1]。该技术具有快速性、实时性、非接触性、高密度性、高精度性、自动化等技术特点,使得其可以有效解决采集数字化信息的难题,该技术目前已经广泛应用于数字城市、地形测量、工业测量、土木工程、防震减灾、变形监测等领域[2-4]。
虚拟现实简称VR,即利用计算机技术构造出三维空间的虚拟世界,为用户提供视觉、听觉、触觉等感官模拟,当用户移动时,电脑通过实时计算,将精确的3D影像传送给用户,把人的意识带入一个虚拟的世界,给用户身临其境的感受。VR技术最早发源于美国军事领域,后传到国内,借助计算机和手机性能突飞猛进、实时三维引擎发展的东风,成为了目前行业异常火爆概念之一,其具有沉浸感、交互性、想象性等特点,在水利工程规划、流域地理景观虚拟再现、河道洪水演进等领域均有应用[5],能够将实景建筑展现在行业人员眼前,实现BIM模型的信息化、智能化、可视化和集成化,未来其技术潜力巨大,应用场景广阔。
BIM是以建筑工程项目相关信息数据作为基础,建立起三维的建筑模型[6],通过数字信息仿真模拟建筑物所具有的真实信息,具有信息完备性、信息关联性、信息一致性、可视化、协调性、模拟性、优化性和可出图性等八大特点[8]。作为一种创新的工具与生产方式,已在多个国家和地区引发了巨大变革,并被无数成功案例证明了其价值优势[7-10]。我国从国家层面发布《2016~2020建筑信息化发展纲要》大力推进BIM技术的不断发展。
随着三维激光扫描、虚拟现实及BIM技术的不断普及与完善,计算机硬件水平的突飞猛进,行业人员对于三维可视化技术的强烈需求,这三种技术完美融合成为了行业发展的趋势。本研究旨在采用三维激光扫描仪获取某能源站的点云数据,基于AutodeskReCap平台和Bentley Context Capture Center平台,对数据进行处理和整合,并利用计算机虚拟现实技术,建立能源站虚拟环境,从而实现该能源站的虚拟漫游功能。
1 建立建筑物点云数据模型
某大型能源站,工程要求实现全站智能管理,因缺乏图纸且内部管路、设备众多,传统绘图手段无法有效建立BIM模型,因此,本项目引入了地面三维激光扫描技术,通过获取内部复杂设备点云模型,帮助BIM工程人员方便的建立模型信息。
1.1 I-Site激光扫描仪工作原理
地面三维激光扫描仪通过发射器发出激光脉冲信号后,经过物体表面的漫反射,信号沿着相似路径传回到接收器[11],如图1所示。通过式(1)可计算目标P点与扫描仪距离S,也可同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。X轴、Y轴在横向扫描面内,且相互垂直,Z轴垂直于扫描面,三轴符合右手定则,坐标示意图剪图如2所示。

图1 激光三角法测量原理

图2 激光扫描系统坐标示意图
目标点P(X,Y,Z)坐标计算公式:

1.2 能源站点云数据采集
本次数据采集是为建立高精度、精细化的小区域三维场景,需要对场景内的所有物体进行高精度扫描,同时要求点云数据能够清晰表达物体细节和表面纹理影响。
外业获取的点云数据是整个三维场景构建与可视化的基础数据,是整个项目实施过程中最为重要的阶段,对构建模型的质量有着不可忽视的影响。通过现场踏勘,全面细致地了解现场环境,确定能源站具体位置及周边环境情况。为防止能源站各建筑相互遮挡,需进行多站联合作业。扫描站点布设不宜太多,但应保证各扫描站点间有足够的重叠区域。标靶主要是计算各扫描站点间坐标系转换参数的依据,因此,标靶应该是位置不变且易识别,具有高度差的一系列特征点。
获取点云数据后,需要进行数据配准,即将不同扫描站点获得的点云数据通过靶标进行重新定位,生成统一坐标系下的三维点云数据。然后进行点云过滤处理,删除由于空气中的浮尘、噪声等引起的孤点,保证点云数据的真实性。具体实施流程详如图3所示。

图3 点云扫描操作流程
2 基于点云的模型生成
2.1 点云格式转换
AutodeskReCap是一款独立的应用程序,它可以通过引用多个索引扫描文件(RCS)创建点云投影文件(RCP),使该点云文件可视化,并将扫描文件转换成点云格式,使其能在其他产品中编辑。通过AutodeskReCap软件将RCP点云文件转换为Context Capture Center支持的E57点云格式。
2.2 生成模型
目前作为市面上应用广泛的倾斜摄影三维建模软件之一,Context Capture Center是一款品质稳定、操作简单、高性能、可扩展、兼容性、可移植的全自动建模软件,其支持多种数据源格式,兼容摄像机系统、雷达点云系统等,可以导入各种主流GIS平台及三维编辑软件,支持多机器协同操作。其支持ASTM E57文件格式(.e57)和Cyclone点云格式(.ptx),支持具有已知扫描位置的点云。
Context Capture Center对于点云数据体量没有限制,由于本次点云数据量较大,采用 Context Capture单机版已无法满足使用需求,因此本次计算采用了联机渲染方式,通过设置远程访问输入、工程及输出文件的UNC(通用命名规则)路径,实现计算机集群工作。具体设置如图5所示。

图4 能源站内部点云图

图5 计算机联机渲染设置
将处理后的点云数据通过point clouds导入Context Capture Center中,在tile中根据机器性能,将点云分块处理,按照需要选择生成的模型格式,然后生成模型。生成的能源站内部三维网格图如图6所示。

图6 能源站内部三维图
3 能源站BIM模型
无论是点云建模还是倾斜摄影建模,其创建的模型均在同一属性层,与BIM应用中要求模型挂接相关属性信息的要求有较大出入,因此点云生成三维模型无法直接应用于BIM模型中。本文采用常规的手段,通过AutodeskReCap将设备点云独立出来,以此单独建模,并最终实现属性的挂接。设备点云如图7所示,设备BIM模型如图8所示。
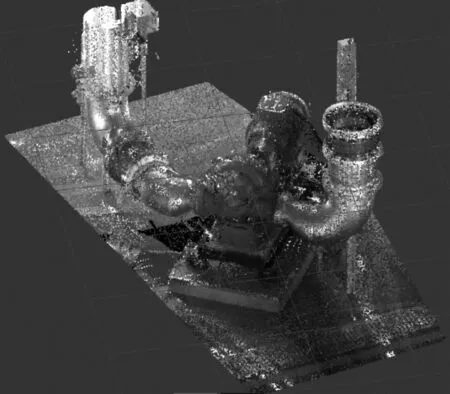
图7 能源站设备点云

图8 能源站设备BIM模型
4 基于VR技术的能源站场景仿真
沉浸式体验是VR的核心也是技术难点,它涉及到多个领域,包括渲染优化、性能优化、人眼构造及肢体运动与感知等。其特点是:利用头盔显示器把用户的视觉、听觉封闭起来,产生虚拟视觉,利用其它设备将用户的手感通道封闭起来,产生虚拟触动感。本文主要针对虚拟视觉进行。
4.1 设备及原理
虚拟现实的精髓是把双眼“放”到虚拟世界中,“感知”这个世界的光影,从而使用户身临其境。本次开发基于C#语言,依托Unity3D平台,最后通过暴风魔镜及安卓手机实现VR效果。
Unity3D作为一款主流游戏引擎,能够为开发者提供如三维视频、建筑可视化及实时交互动画等虚拟场景解决方案,支持Windows、Wii、iPhone、Android、WebGL等平台,是一款主流的VR产品开发游戏引擎。
暴风魔镜是暴风影音发布的一款硬件产品,是一款VR头显,使用时通过配合暴风影音开发的专属魔镜应用,在手机上即可实现3D效果。
本次开发基于Google开源技术平台CardBoard,其虚拟现实效果是由VR眼镜与一部安卓手机结合而成,眼镜镜体通过透镜加屏幕的原理,将虚像呈现在人的明视距离处实现了沉浸式的虚拟现实感,其原理图如图9所示。

图9 CardBoard原理
通过凸透镜来放大眼中的即时图像,暴风魔镜给出了98°的视场角度,视野开阔,沉浸感较强。通过调用手机内部陀螺仪等传感器进行视角转变,当头部转动时,陀螺仪能够及时通知引擎更新图像,从而使人产生360°的三维空间感。通过两个摄像头模拟左右眼效果,从而给人眼创造出强烈的立体纵深感。
4.2 搭建开发环境
Unity3D能够为虚拟现实开发提供一个处理光照、特效、物理效果等的平台,其VR环境搭建主要包括以下步骤:
(1)安装Unity3D软件,软件版本必须在5.1及以上;
(2)搭建安卓环境,需要下载并安装Java Development Kit(JDK)及 Android Develop Tool(ADT),其中ADT包括Software Development Kit(SDK)和 eclipse;
(3)将Unity3D与JDK、SDK等关联。
4.3 在Unity3D中开发
VR系统虚拟视觉在Unity3D开发中主要用到以下几大关键技术:
(1)实时三维计算机图形
VR开发前需要用到三维计算机图形——已经建成的BIM模型,通过在3DMAX中设置精确的光影效果,将最终模型导入Unity3D中,模型列表图及程序列表如图10、11所示。

图10 Unity3D模型列表图

图11 Unity3D
(2)头部追踪
传统的计算机图形技术中,视场的改变多是通过鼠标或者键盘来实现,用户的视觉系统和运动感知系统是分离的,利用头部追踪来改变图像的视场,用户就可以将视觉系统与运动感知系统联系起来,视觉感知更为避震。
VR中追踪头部动作主要是通过Cardboard-Head.cs来实现,将此脚本附加到任何与用户头部运动相匹配的对象上,通过追踪头部动作,可以不断地更新头部视图中的Cardboard对象,也可以通过该脚本实现偏移相机的动作。
(3)虚拟场景显示
在3D电影中,通过两台并列放置的摄像机替代双眼,3D眼镜接受与之相匹配的偏振光,将两部摄像机获得的画面分别投射到用户的左右视网膜上并被大脑感知,这就形成了3D虚拟视觉。因此,虚拟现实的核心思想就是通过两台平行的摄像机在统一的标准下进行开发。
在Unity3D中通过设置两个摄像机,Main Camera Left和Main Camera Right分别对应左、右眼,然后通过将获得的两个图像精准投放到手机屏幕的输出端口,具体通过CardboardEye.cs来实现。
同时由于VR透镜的使用,导致生成的图像发生畸变,消除畸变可采用“放扭曲”方式,如Cardboard中产生的枕形畸变可采用桶形畸变方式修正,Unity3D中主要通过程序RadialUndistortionEffect.cs来实现,用于校正图像效果在虚拟现实模式下的显示情况,而StereoController.cs则主要用于控制VR模式的开关。
程序HeadTransform.cs通过获取头部X向、Y向、Z向三轴方向,控制角色移动的方向,Movie.cs则通过手柄控制角色前、后、左、右移动。
最终实现效果如图12所示。

图12 能源站内部VR视景
5 结语
采用点云数据生成三维模型,其操作流程与采用倾斜摄影照片生成模型过程基本一致,只是缺少生成空三流程。就使用情况而言,雷达扫描点云数据和倾斜摄影均能够对大范围地形或建筑群模型进行建模,但针对单体建筑物的内部复杂结构,雷达扫描点云技术更为适合。
VR技术因其独特的交互性和沉浸式体验能够快速吸引用户的注意力,给用户留下深刻的印象。随着技术的不断成熟,硬件设备成本不断降低,VR技术的普及只是时间问题,将其应用于BIM工程中,能够让不同的用户通过第一人称视角看到不同的世界,从而给BIM工程建设者提供更加广阔的创作空间。但现阶段,VR技术也存在不足,目前的计算机处理速度还无法完全满足虚拟世界中巨大数据量实时处理的需要,硬件价格也比较昂贵,在听觉、触觉、语音交互方面效果还不能令人满意。
伴随着信息化时代的发展,人们对空间三维信息的需求越来越广泛,越来越多的工程要求使用BIM技术,但是对于一些内部结构复杂的老旧工程或者相关设计图纸不全面的工程,BIM建模难度较大,本文通过激光点云技术配合二维图纸建模的方式为类似BIM工程提供了一种解决方案,并将虚拟现实技术引入到BIM工程中。
[1]欧阳俊华.近距离三维激光扫描技术[J].红外,2006(03):1-7.
[2]RESHETYUK Y.Investigation and calibration of pulsed time offlight terrestrial laser scanners[Ph.D.Thesis][D].Stockholm:Royal Institute of Technology(KTH),2006.
[3]LEMMENSM.Geo-information[M].[S.l.]:Springer,2011:101-121.
[4]GORDON S,LICHTID,STEWARTM.Application of a high-resolution,ground-based laser scanner for deformation measurements[C]Proceedings of the 10th International FIG Symposium on Deformation Measurements.Orange:[s.n.],2001:23-32.
[5]黄少华,史那.基于VR与GIS的水利工程试算一体化系统的研制[J].测绘信息与工程,2017,32(05):1-3.
[6]李强,龚翼,陈伟.Autodesk Civil3D在精确地形建模中应用的几点体会[J].水利规划与设计,2008(01):51-53.
[7]杨晚生,梅胜.建筑设备工程管理[M].北京:化学工业出版社,2009(09).
[8]李敏.基于BIM技术的可视化水利工程设计仿真[J].水利技术监督,2016(03):13-16.
[9]Associated General Contractors Guide(2006).AGC Contractors'Guide to BIM[EB/OL].
[10]李云贵,邱奎宁.我国建筑行业BIM研究与实践[J].建筑技术开发,2015(04):3-10.
[11]董秀军.三维激光扫描技术及其工程应用研究[D].成都理工大学,2007.
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
科学(2020年5期)2020-11-26
小哥白尼(趣味科学)(2019年2期)2019-04-17
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
汉语世界(2017年3期)2017-06-05
商周刊(2017年24期)2017-02-02
海外星云(2016年7期)2016-12-01
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24