
国内外医用康复机器人行业标准的研究
2018-03-19 09:49乐珺陈忠郭凤仙
机械制造与自动化 2018年1期
乐珺,陈忠,郭凤仙
(上海电气集团股份有限公司 中央研究院,上海 200070)
0 引言
近年来,随着机器人产业的应用和发展,在工业机器人方面我国已采用ISO标准并制定了多项国家标准,服务机器人行业的相关标准制定工作也在不断的推进中,《国家中长期科技发展规划纲要(2006-2020)》将发展智能服务机器人作为前沿技术,明确提出要加强“智能服务机器人在非结构环境下为人类提供必要服务的多种高技术集成的智能化装备”的研究。在中国康复辅助器具协会的行业标准明细表中,康复训练器械大类里已有正在编制中的国家标准《上肢康复训练机器人要求和试验方法》,规定了上肢康复训练机器人的分类、要求、试验方法、检验规则等内容[1]。
医用康复机器人是目前国内外机器人研究领域中最活跃、投资最多的项目之一,在临床中的应用也越来越广泛,发展前景广阔[2]。本文仅以用于帮助残疾人进行肢体康复训练的上肢康复机器人、下肢康复机器人及全身康复机器人的相关标准作为分析和讨论的对象。
1 国内外医用康复机器人行业标准对比
目前世界上最具权威性的三大国际标准化组织为:国际标准化组织(international organization for standardization,ISO )、国际电工委员会(international electrotechnical commission,IEC)和国际电信联盟(international telecommunication union,ITU),按照分工,IEC负责电工电子领域的国际标准化工作,其他领域由ISO负责。而ITU是联合国的专门机构,主要负责无线电频谱方面的国际标准化及协调工作。有关机器人的国际标准主要由国际标准化组织ISO与IEC制定和发布。
1.1 电气安全
医用康复机器人属于医用电气设备,必须严格按照规范,以确保使用过程中不会对用户本身、医护人员及周围环境造成危害,如触电、火灾、机械危险、辐射过量、发热等。本文从电气安全标准和机械安全标准两大方面分析国内外现有医用机器人相关标准的发展现状。
相对其他电子设备而言,医用电子设备在很多情况下是与患者的器官或组织直接相接的,患者免疫力相对较差,轻微的漏电都难以忍受,因此其安全检测的要求更加严格,IEC 60601-1[3]是目前认可度最高的医用电子产品电气安全检测标准,我国相应地将其转变为GB9706标准。目前国内外为残疾人设计的医用设备应符合的电气安全标准如表1所示。

表1 电气安全的适用标准
IEC 60355[4]《家用和类似用途电器的安全-通用要求》中将康复机器人定义为:无人看管器具、连续工作器具、装有遥控设备器具、电池供电器具。IEC 60601-1是医用电气设备的安全通用要求,是安全的前提,医用电气设备要取得CE认证,满足IEC 60601-1是前提条件。IEC 60601-1中规定了医用电气设备在安全方面应该满足的基本要求,其中包括对6种危险的防护:1)电击危险;2)机械危险;3)不需要的或过量辐射危险;4)易燃麻醉混合气体点燃危险;5)超温和其他安全方面危险;6)工作数据的准确性和危险输出。IEC 60950[5]中规定了机构和电气部分的测试要求。
医用电气的检测标准项目主要包括:绝缘强度检测,接地检测,漏电检测。绝缘强度检测的测试电压是在本产品基准电压的基础上加上相应的电压值。不同国家有不同的规定,国际GB9706.1中根据不同的基准电压对试验电压进行了相应的规定[6]。
接地检测主要检查裸露于外的或者是容易被接触到的用于金属类部分与医用电子产品电源线基准地的电阻,以便确认如果医用电子产品出现故障或者是操作者不慎接触到医用电子器械带电部位而发生触电事故的情况下,电流是否可以经上述连接直接导向大地而不是流经操作人员。测试时需要足够大的电流,确认接地连接完善与否[7]。
漏电流是指从电子设备与人接触点流经人体之后,传回地面或者其他点的电流。漏电检测包括:对地漏电流检测,产品外壳漏电流检测,患者漏电流检测以及患者辅助漏电流检测。医用电子产品的漏电检测需要在产品接通电源之后进行,漏电检测是医用电子产品设计开发阶段必须进行的一项检测项目,并且需要到受国家认可的实验室进行,不同类型的设备,可接受的漏电流级别也有所差异。
在生产环境下,所有漏电流检测都需要将电压控制在110%的最高值,并在正常状态以及各个单一故障下进行。正常状态是指被认定为不存在问题的日常电气状态,单一故障状态是指在使用电子产品过程中可能发生的主要故障状态[8]。
1.2 机械安全
我国机械安全的标准分为A类安全基础标准,B类安全通用标准以及C类专用机械安全标准。A类标准包括所有机械的基本概念、设计原则和一般特性。国内外机械安全标准对比如表2所示。
B类标准设计一种安全特征或一类使用范围较宽的有关安全的装置,B1类是特定的安全特征标准,如:安全距离、表面温度和噪声,B2类是安全装置标准,如:双手操纵装置、联锁装置、压敏装置和防护装置等。国内外机械安全B类部分标准的对比如表3所示。
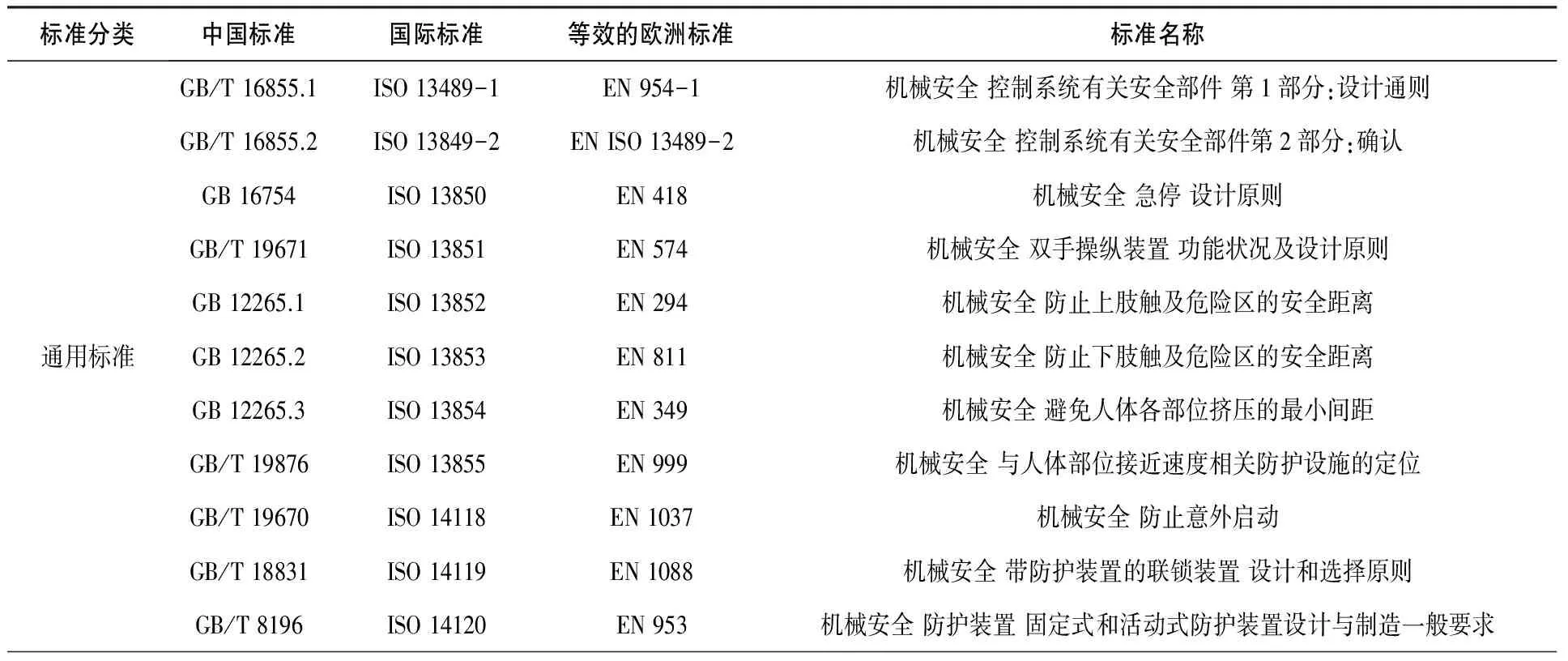
表3 国内外机械安全B类标准对比
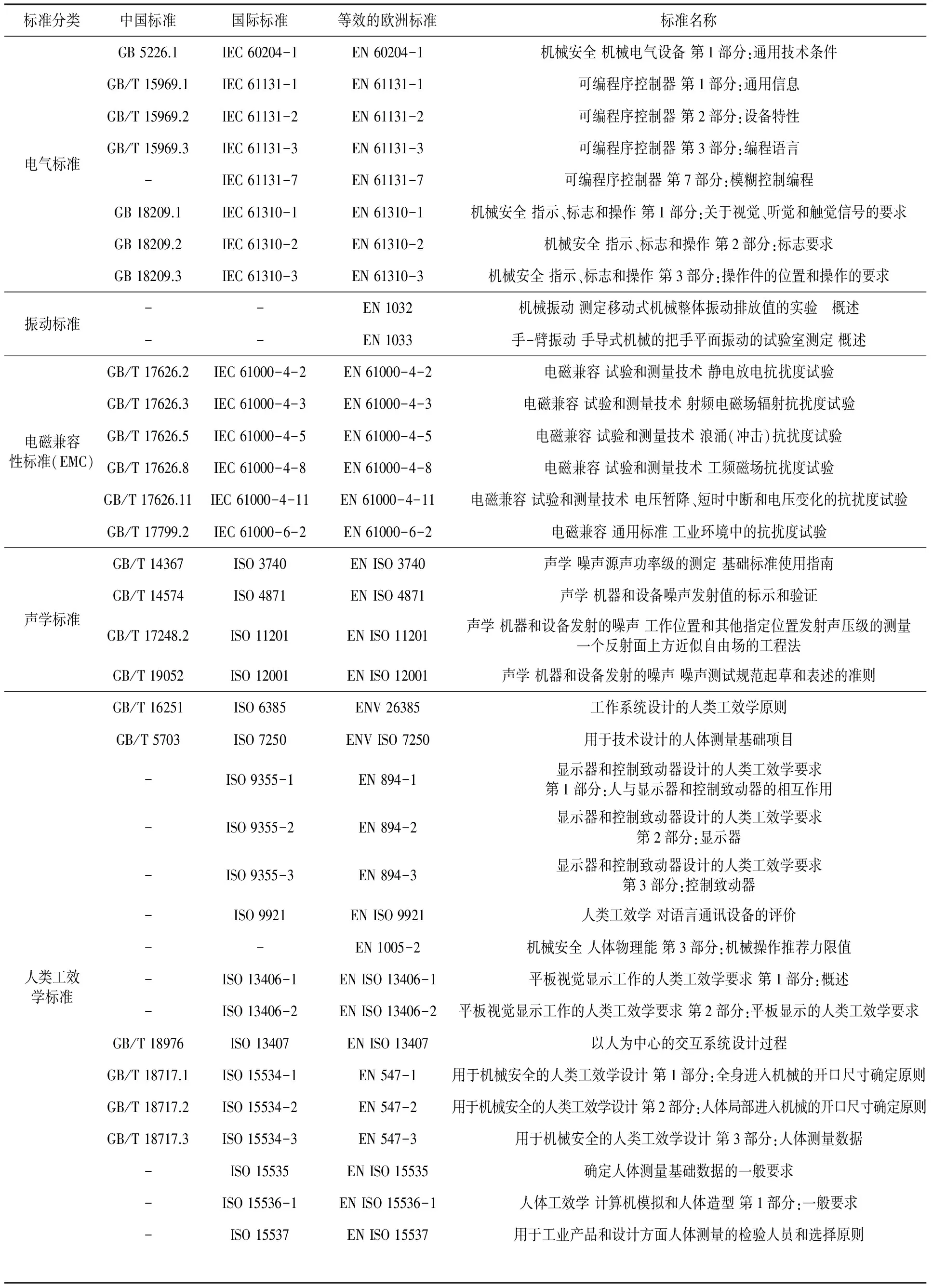
续表3
由此可见我国现行的大部分标准都采用了国际标准(ISO),相比于欧洲的发达国家的标准数量并没有十分落后,但标准的贯彻和实施,是我国的薄弱环节。目前我国医疗器械标准体系还不完善,且在运行过程中,缺乏标准反馈机制,管理监督机制不健全,实施保障机制不完善等,都还需要进一步加强。
2 日韩医用康复机器人相关标准分析
日本、韩国在服务机器人的研究上都有健全的政府实验室、公司和大学混合团队,在类人机器人、个人机器人及服务机器人相关标准的制定上也都处于世界领先水平。医用康复机器人属于服务机器人大类,应符合相关标准。
2.1 日本医用服务机器人行业标准的发展现状
日本目前发布的与医用服务机器人相关的标准有:
1) 智能机器人—词汇 (JIS B0185-2002);
2) 可移动机器人—词汇(JIS B0186-2003);
3) 服务机器人—词汇(JIS B0187-2005);
4) 残疾人用辅助产品的术语(JIS T0102-2011);
5) 老年人和残疾人指南:通用指南(JIS X8341-1-2010);
6) 老年人和残疾人指南:信息处理设备(JIS X8341-2-2004);
7) 老年人和残疾人指南:网络内容(JIS X8341-3-2010);
8) 老年人和残疾人指南:远程通信设备(JIS X8341-4-2011);
9) 老年人和残疾人指南:办公设备(JIS X8341-5-2006);
10) 老年人和残疾人指南:软件可访问性导则(JIS X8341-6-2013);
11) 老年人和残疾人指南:辅助功能装置(JIS X8341-7-2011);
12) 老年人和残疾人指南:包装和容器危险的触觉警告与要求(JIS S0025-2011)。
1)-4) 定义了几种类型机器人的专业词汇及相关辅助产品的术语,5)-11) 从各方面规定了老年人和残疾人使用设备的要求,7) 中指出:信息无障碍是指任何人(无论是健全人还是残疾人,年轻人还是老年人)在任何情况下都能平等、方便、无障碍地获取信息、使用信息。由日本信息通信普及委员会(IAC)制定。
我国目前信息无障碍的主要标准是《信息无障碍身体机能差异人群网站设计无障碍技术要求》(YD/T1761-2008),该标准虽然实施较早,但也仅是从无障碍导向的角度建立起了一个技术规范的框架,而在具体的网页无障碍环境技术要求方面还需要深入探究[12]。
2.2 韩国医用服务机器人行业标准发展现状
韩国是世界上出台康复机器人标准最多的国家。标准内容包含:智能机器人、家电机器人、服务机器人、可移动机器人等多个方面。与医用服务机器人相关的标准包括:
1) 服务机器人安全总则(KSB 6935-2006);
2) 服务机器人安全指南(KSB 6936-2006);
3) 服务机器人:第一部分,分类和总体定义(KSB 6937-2006);
4) 服务机器人:第二部分,老年人和残疾人通用指南(KSB 6938-2006);
5) 服务机器人灵活性检测方法:第一部分,基本规范的确定(KSB 6939-2006);
6) 服务机器人灵活性检测方法:第二部分,稳定性确定(KSB 6940-2006);
7) 机械安全—防止被上肢触及的安全距离(KSB 6947-2007);
8) 机械安全—意外启动的预防(KSB 6953-2007);
9) 机械安全—风险评估的准则(KSB 6954-2007);
10) 服务机器人电气安全要求(KSB 6960-2007);
11) 服务机器人机械强度检测方法:第一部分,载荷检测(KSB 6961-2007);
12) 服务机器人机械强度检测方法:第二部分,降落和扭矩检测(KSB 6962-2007);
13) 服务机器人自动避障性能测试方法(KSB 6963-2007);
14) 服务机器人情感表示方法:第一部分,语言表述(KSB 6964-2007);
15) 服务机器人外形安全要求(KSB 6966-2008);
16) 服务机器人移动性能测试—定位精度(KSB 6969-2008)。
1) -2) 主要是针对服务机器人的设计制造者制定出的安全规范并针对设计过程制定出风险评估流程,具有很强的概括性和通用性,属于管理性标准,但这两项规范中并未涉及具体的实验技术指标,不能作为产品安全验证的依据。3) -16) 从服务机器人的灵活性测试、机械安全、机械强度测试、避障性能测试、移动性能测试、外形安全等几个方面规定了安全及性能测试要求。
日本的服务机器人标准除采用国际标准ISO以外,另外的标准集中在智能机器人、可移动机器人、服务机器人和焊接相关的词汇上,而韩国的服务机器人标准数量多且覆盖范围广,这也是为什么当今国际组织中服务机器人标准的大部分召集人均由韩国专家担任的原因之一。相对于日韩两国,我国服务机器人的标准不论是在数量还是在种类上,都处于明显落后的位置。
3 对我国医疗器械产业标准体系发展的几点建议
1) 及时清理并修订超龄标准
近几年,随着医疗器械行业的快速发展,对我国医疗器械标准提出了更高的要求,现阶段标准实施年限超过10年的医用器械标准仍占22%,行业标准占13.5%,甚至有些标龄大于20年的现行标准仍在使用,这就在一定程度上造成了标准落后于市场的现状。因此需要加大对过时标准的修订工作,结合国内外现状,提高医疗器械标准的适用性,更好满足市场需求,促进发展。
2) 加快各类医疗器械产品的标准制修订工作
面对日新月异的康复产业,医疗器械的新产品越来越多,想要针对每一个产品制定标准是不现实的,需要结合产品大类的特性,按照医疗器械产业市场的要求,制定相关标准,以满足、服务于医疗器械产品市场的发展。对于高新技术产品标准的制修订,可充分发挥企业的优势,结合业内领先企业的专业技术能力,完成标准制修订工作。
3) 建立完善的标准体系,加强贯彻与实施
由于我国康复工程发展时间短,重视不够及科技投入严重不足等原因,导致目前国内现行行业标准远落后于市场所需的现状,承担医疗器械标准拟定的表管中心等相关单位,应在充分调研的基础上,制定标准的制修订规划,统筹规划制定“医疗器械标准体系表”,有序、高效地开展工作,尽快建立较为完善的标准体系,同时在市场的推动下,加强标准的贯彻与实施,建立有效的监督机制及保障体系。
4 结语
目前我国医用服务机器人的产业基础还相对薄弱,相关市场还处于培育发展期,缺乏相关国内和国际标准,随着医用服务机器人应用领域的拓展,合理地规划和制定医用服务机器人相关标准,开发具有自主知识产权的检测仪器和设备会成为必然趋势,并将推动国内医用服务机器人的快速发展。
[1] 顾冬雷,王硕,王颖. 机器人相关国际和国家标准研究[J]. 机器人技术与应用,2013(5):21-23.
[2] Russell H. Taylor. A Perspective on Medical Robotics[J]. Proceedings of the IEEE, 2006,94(9):1652-1664,
[3] IEC-60601-1 Medical Electric Equipment-Part1: General Requirements for Basic Safety and Essential Performance[S]. IEC, 2007.
[4] IEC-60335-1:2010 Safety of household and similar electrical appliance-Safety-Part1:General requirements[S]. IEC, 2009.
[5] IEC-60950-1-2005 International standard information technology equipment-Safety-Part1.General requirements[S]. IEC, 2013.
[6] 赵爽,吴蒙,陈文龙. 国内外家庭服务机器人标准研究[J]. 家电科技,2014(1):34-36
[7] 胡泽. 医用电子产品的电气安全检测[J]. 中国医疗器械信息, 2002, 9(5): 56-58.
[8] 姜杉,杨志永,李佳. 医用机器人研究、应用与发展[J]. 机床与液压, 2005(5):1-5.
[9] 王田苗,张大朋,刘达. 医用机器人的发展方向[J]. 中国医疗器械杂志,2008, 32(4):235-238.
[10] 张苹. 服务机器人产业标准化问题探究[J]. 机器人技术与应用,2009(1):11-16.
[11] 张苹. 服务机器人标准化项目策划研究[D]. 北京:中国科学院大学,2013.
[12] 梁晓婷. 我国医疗器械标准管理中的问题分析及对策探究[D]. 北京:北京协和医院医用信息研究所,2008.
猜你喜欢
中学生数理化·高一版(2020年6期)2020-12-17
医疗装备(2020年21期)2020-12-16
中学生数理化(高中版.高二数学)(2020年6期)2020-12-04
医疗装备(2020年10期)2020-06-13
质量安全与检验检测(2019年3期)2019-07-31
质量安全与检验检测(2018年6期)2018-12-28
消费导刊(2018年10期)2018-08-20
小天使·六年级语数英综合(2017年3期)2017-04-25
环球时报(2016-07-12)2016-07-12
浙江人大(2014年6期)2014-03-20
