
采用信息融合的红外目标检测算法
2018-03-09 07:28郑武兴王春平
激光与红外 2018年2期
郑武兴,王春平,付 强,徐 艳,李 宁
(1.陆军工程大学石家庄校区电子与光学工程系,河北 石家庄 050003;2.陆军炮兵训练基地教研部,河北 张家口 075100)
1 引 言
红外目标检测一直以来都是人们研究和关注的重点,红外探测不发射电磁波,被动接收电磁波,相对雷达检测其隐蔽性能好,可避免反辐射导弹的袭击。红外目标探测是利用物体热辐射的不同来进行目标探测的,而任何温度高于绝对零度的物体都会产生热辐射[1],相比于可见光检测,红外检测具有昼夜工作,受天气影响小等优势。因此红外目标检测在精确制导、防空预警、安全监控等领域的应用越来越广泛[2]。正因如此,长期以来低信噪比条件下的红外目标检测技术一直备受国内外关注,如何有效精确地检测出目标位置,提高检测算法的抗干扰性和适应性,是一直需要解决的问题。
从20世纪80年代起,红外目标检测算法便开始逐步发展。近些年来,随着科学技术的发展以及各学科领域之间的知识交叉和融合,检测、识别新算法不断涌现,如时空域滤波法[3]、显著性及其各种组合方式[4-5]]、自适应门限法[6]、Top-Hat变换[7-8]、背景抑制法[9]、神经网络法[10]、机器学习法[11]等。文献[3]提出了将空时域滤波结合起来进行红外目标检测,这种方法是针对图像序列进行的目标检测,不能在单帧图像中及时发现弱小目标。文献[6]提出融合图像边缘检测和局部运算来自动确定目标位置并预先提取出潜在目标区域,但对于小至几个或十几个像素的弱小目标其检测效果并不理想。文献[7]和文献[8]使用的Top-Hat法检测算法计算速度快,但需要事先确定结构元素尺寸,并且当虚警和目标的灰度值相等时不能很好地对目标进行检测。文献[10]和文献[11]提到的神经网络和机器学习等方法由于样本需要经过学习训练,大部分不能满足实时性等要求。由此可见,红外目标检测技术依然面临很多难题,目标检测融合算法依然有可以改进和提升的空间。
本文根据红外目标的特点以及其检测难点,有效利用已有的目标检测算法,在融合滤波的基础进行显著性检测和边缘检测。同时,对红外原始图像进行质心检测,通过质心检测缩小检测范围。然后,显著性检测和边缘检测在该范围内的检测结果进行权值分配,融合检测结果,以此来获得准确的目标位置,从而最终有效地提高算法的检测精度。
2 算法实现
目前目标检测算法已经很多,众多学者在不断研究和发现新算法的同时,部分学者也开始关注将算法进行组合或融合,以此来获得更好地检测效果。如文献[12]通过将帧间差分检测和背景差分结合的方式获取更精确的目标位置;文献[13]中也是将几种方法融合,获取图像更好的分割效果。
2.1 多模融合滤波
图像滤波作为图像检测前的预处理部分,其主要目的是增强目标与背景之间的对比度,抑制背景杂波,减少噪声干扰,提高图像信噪比。目前的图像滤波算法有很多,不同的滤波方法其滤波效果和适应性也不同,一般情况下图像预处理只采用一种方式对红外图像进行滤波,一方面是为了保证检测的实时性,减少图像预处理耗时。另一方面不同的滤波方式可能会相互干扰,达不到预期的滤波效果。为了得到更好的滤波效果,提高算法的适应性,本文将几种滤波模式进行了信息融合和改进。具体的滤波流程如图1所示。
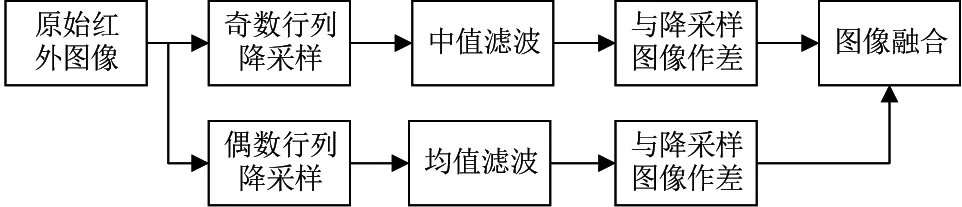
图1 多模融合滤波流程
融合滤波的具体处理步骤如下:
Step1:将原始红外图像进行分组采样,分别提取不同行列的降采样图片。
因为目标在图像中所占区域往往相对集中,通过降采样提取图片,一方面保留了目标和背景的主要特征,且保证了目标的相对位置不变,不影响目标检测的结果,另一方面又可以减少图像处理数据,节省预处理时间。
Step 2:对降采样得到的两组图像分别进行不同形式的滤波。
文中采用了中值滤波和均值滤波这两种滤波方式,因为两幅降采样图片均保留了原始图像中目标和背景的特性,通过对两幅图像进行不同模式的滤波,可以获得保留目标的不同特征。
Step 3:将两种不同模式滤波后的图像分别与各自降采样图像作差,并进行融合。
通过分配不同权值系数将两幅滤波后处理后的图像进行融合,这样保留了两种滤波形式的下目标所具有的不同特点,融合过程中依据滤波效果,对图像进行了权值分配。本文采用中值和均值滤波图像权值2∶3的分配系数,有效提高图像的信噪比,实验取得良好的滤波效果。
为了验证多模融合滤波效果,本文选取了一幅640×480大小且含有目标的红外图像进行处理,结果如图2所示。
从图2可以看出,中值滤波保留了目标相对明显的角点信息,均值滤波则保留了目标相对完整的边缘信息。为了验证滤波效果,文中对原始图像进行了单一模式滤波,滤波后图像与原图作差,结果如图3所示。
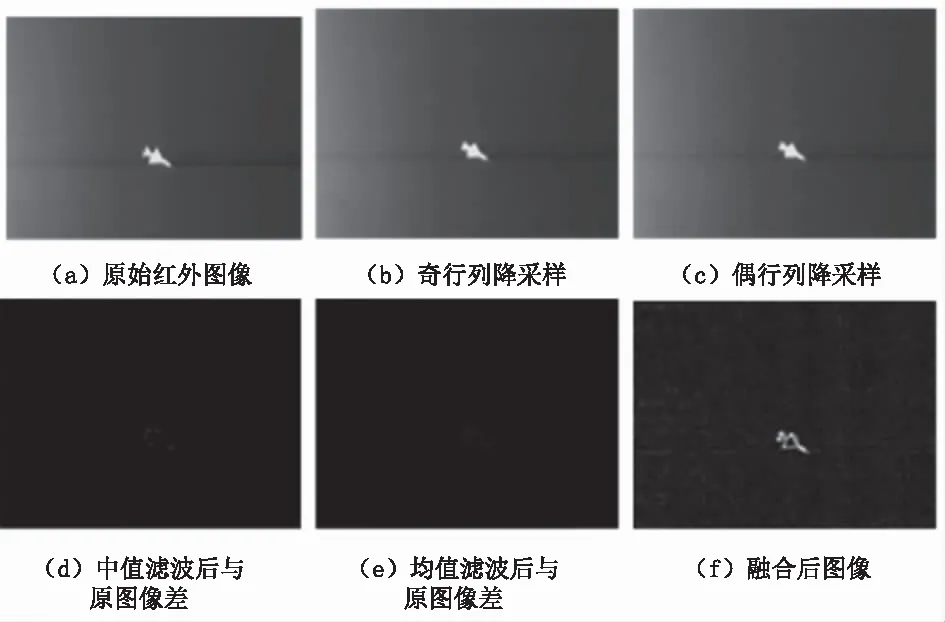
图2 多模融合滤波处理效果
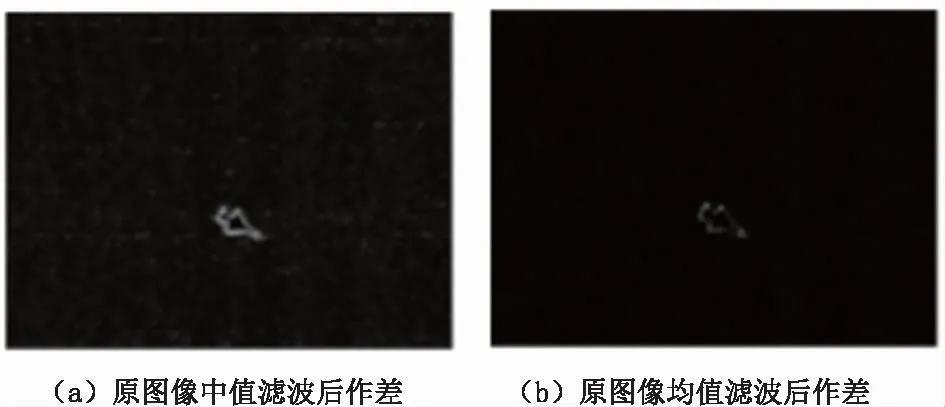
图3 单一滤波模式处理效果
图2(f)与图3(a)和图3(b)对比可以看出,经过融合滤波后的图像使得目标区域更加明显,有利于后面检测算法的目标提取。同时为了进一步验证多模滤波的效果,对不同目标的图像进行了处理,效果如图4所示。

图4 不同目标融合滤波处理效果
2.2 相关检测算法
质心检测又称为矩心检测(或形心检测),是物体对某轴的静力矩作用中心。如果把目标图像看成是一块质量密度不均匀的“薄板”,以图像上各个像素点的灰度作为各点的质量密度,这样就可以借用矩心的定义式来计算目标图像的矩心。由于矩心中心的计算过程是一个统计平均的过程,其算出的目标位置往往不是图像中个别的最亮点位置,而是图像中各个像元灰度加权平均的位置,这种检测方法的结果往往相对稳定但是不够精确。因此可以采用质心检测的方法限定图像中目标检测区域,一方面可以提高目标的检测精度,另一方面可以减少处理数据量,提高算法的检测实时性。图5是质心检测对几种不同目标检测结果。
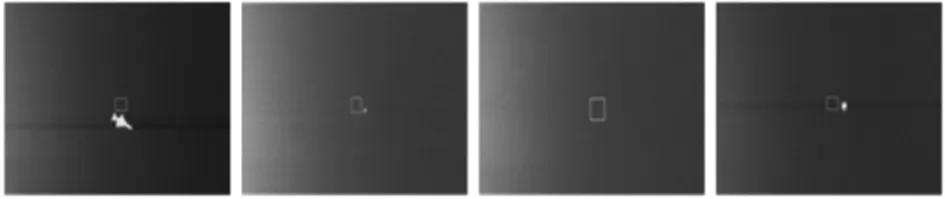
图5 质心检测结果
由上图可以看出:由于质心检测是对整幅图像灰度值进行加权平均的过程,所以会受到来自光照不均以及噪声杂波的干扰,因此其检测结果往往在目标周围区域但是不能精确确定出目标位置。
显著性检测从信息理论角度来看,信息可以分为冗余部分和变化部分,人们视觉对变化部分更敏感,视觉系统的一个基本原则就是一直对频繁出现的特征的响应,同时对非常规的特征保持敏感,所以可以将图像分为两部分。
通过对图像的log频谱观察,侯晓迪等[14]在其研究中发现如下规律:EAf∝1/f。EAf表示大量log频谱的平均值,f表示频率。所以大量的log频谱的平均值和频率呈现出反比关系。所以图像的log频谱和频率曲线成线性关系。log频谱是对图像进行傅里叶变换后的振幅谱取自然对数,大量的图像的log振幅谱几乎趋近一条直线,所以一幅图像的log振幅谱减去平均log振幅谱就是显著性部分。即:R(f)=L(f)-A(f),其中L(f)就是图像的log振幅谱;A(f)就是图像的平均振幅谱。这是显著性检测的基本理论,应用在图像处理上就使得图像中显著区域被提取出来,“奇异点”位置将会得到进一步增强。但是其对于灰度值较小或者强度较弱的目标该方法则不能很好地检测出目标的位置。
边缘检测是利用目标区域和背景区域之间在灰度值上不连续的特征进行的图像检测,其能够很好地刻画出目标物体的边缘信息,并可以大幅减少数据量,剔除一些不相关信息,使观察者能够一目了然,但是同样存在问题的是对于图像预处理效果不好的图像,边缘检测往往会将噪声点或者云层等信息检测出来影响目标检测的最终结果。
2.3 信息融合检测
分析上述各个算法的优点,信息融合检测算法就是充分利用各个检测算法的优点,将检测结果进行融合处理,以期获得更好的检测效果,其检测流程图如图6所示。
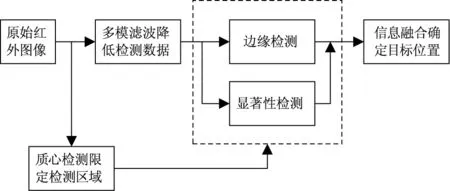
图6 信息融合检测流程图
其具体的检测步骤为:
Step 1:通过质心检测确定出一个检测区域,用于限制后续检测范围。
原始红外图像中可能受到光照不均,噪声杂波等一系列的影响,导致质心检测不能准确检测目标位置,但检测效果往往接近目标区域(如图5所示),利用该方法可将质心检测出的目标位置进行中心对称,以检测点和对称点为对角线,并进行适当扩展,从而确定一个新的检测区域。该区域应包含目标区域和部分背景区域,这样可以很好剔除部分干扰。
Step 2:在融合滤波基础上,进行显著性检测。
将原始红外图像,通过本文所提的融合滤波进行处理,提高图像的信噪比。然后再对处理后的图像进行形态滤波,对目标区域再次进行图像增强,最后进行显著性检测,在步骤1确定的检测区域内进行显著性区域检测,并将检测出的位置信息记为F1,作为目标检测的一个特征。
Step 3:在融合滤波基础上,进行边缘检测。
同样是先对图像进行融合滤波,然后在此基础上采用边缘检测,提取滤波后的目标边缘信息,并依据步骤1确定的检测区域,确定目标的检测位置并记为F2。
Step 4:将选定范围区域内提取到的目标信息F1和F2,按照式1进行信息融合,确定目标的最终位置。
Fz=λ1F1+λ2F2
(1)
式中,Fz表示最终检测的目标位置;λ1和λ2分别是不同的融合系数。λ1/λ2为两种不同检测算法检测后图像的全局信噪比的整数比值:
(2)
根据式(2)计算,全局信噪比(GSNR)的计算公式如式(3)所示:
(3)
其中,设定ωi中i=1表示显著性检测的全局信噪比;i=2表示边缘检测的全局信噪比;ui表示对应检测算法检测后目标区域的灰度均值;ug表示整幅图像的灰度均值;σg表示整幅图像的标准差。
3 实验效果及分析
为了验证信息融合检测算法的的性能和效果,本文通过实验对算法进行了验证。本文的仿真实验平台是基于硬件平台32位操作系统的 Intel Core i5 CPU,8GB RAM计算机;软件平台是基于Windows7操作系统和MATLAB R2015b。
实验中选取了四组含有不同目标的红外原始图像进行实验,分别对原始图像进行了显著性检测,边缘检测和本文的信息融合检测,其实验效果如图7所示。
图7(a)为一组含有不同目标大小的原始红外图像,图7(b)是显著性检测效果,观察可知显著性检测可以在一定程度上检测出目标的位置,但是对于十分弱小的目标而言(如图7(a)中的第三幅图片),并不能够有效检测出来,同时对于杂波干扰严重的红外图像,也会将背景中杂波误检出来,影响检测结果。图7(c)是边缘检测效果图,由图可知,边缘检测可以很好地刻画目标的边缘及形状,但是对于受到杂波影响严重图像,虽然采用了传统的滤波形式但依然会检测出大量的噪声信息(如图7(a)中的第一幅图片),同时对于十分弱小的目标,单一检测模式也不能很好地检测出目标。图7(d)为本文所提的信息融合检测效果,可以看出在经过质心检测范围的限制,并融合了显著性检测和边缘检测的优点后,目标区域十分明显,对于弱小目标本文的检测算法依然可以有效检测出目标。
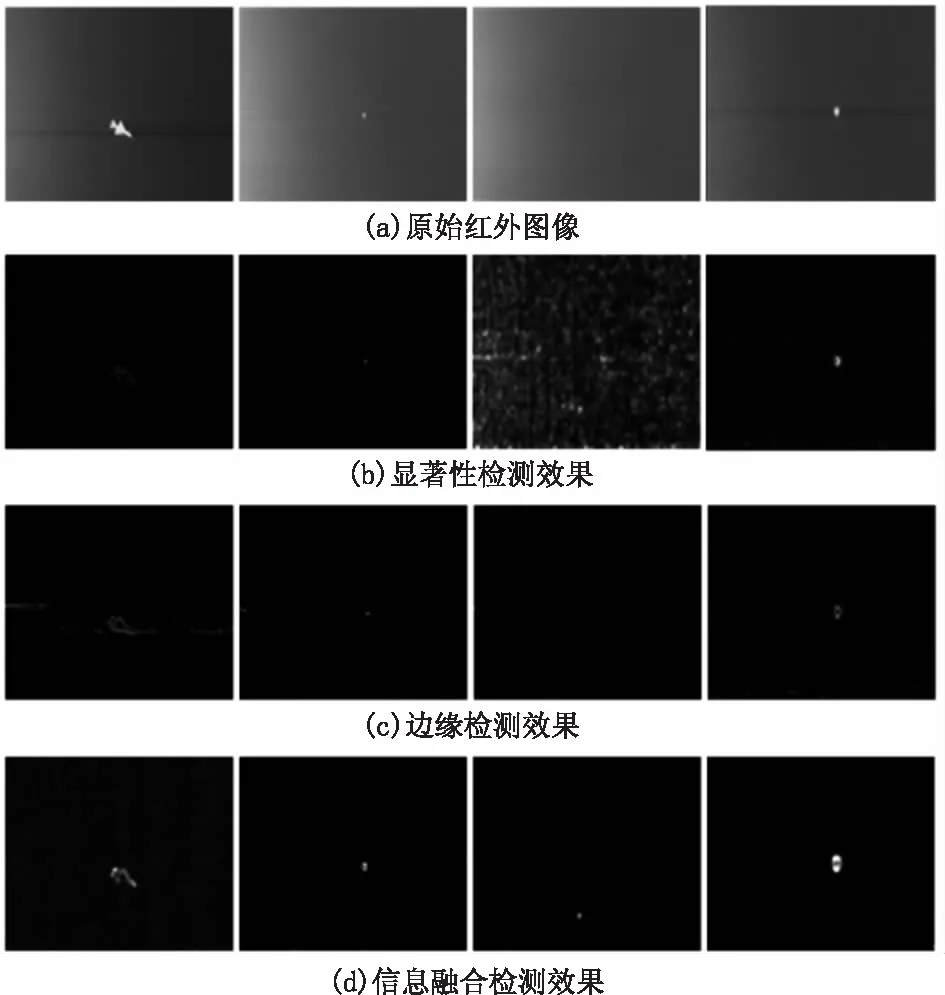
图7 检测效果图
表1是所选取序列检测结果相关参数的平均水平,从图像标准差、全局信噪比以及检测时间对处理结果进行客观评价。从表中可以看出融合检测算法处理后的图像标准差降低明显,说明背景在很大程度上得到抑制,同时信噪比得到很大提高。不过在检测效率上,即使使用降采样、限制检测区域,但由于融合了几种算法导致检测时间依然有所降低。

表1 检测结果及相关参数对比
4 结 论
本文通过融合多种滤波形式来增强红外图像的信噪比,并将常用的质心检测、边缘检测、显著性检测等检测方法进行了有效融合,通过算法之间的“取长补短”,有效提高了图像的检测效果,使得融合后的检测算法适用范围更广,无论对于弱小目标还是具备形状信息的红外目标,甚至受到杂波干扰严重的情况均可以较好地实现目标检测,融合算法的鲁棒性更强。当然算法仍然存在一定的不足,因为融合算法较多所以检测时间相对较长,后续可以通过整体采用降采样的方式进行改进,提高融合算法的检测效率。
[1] WU Zhi.Image of the projectile trajectory analysis and research[D].Xi′an:Xi′an Technological University:2010.(in Chinese)
武智.弹丸轨迹图像的分析与研究[D].西安:西安工业大学,2010.
[2] Lei L,Huang Z.Infrared dim target detection technology based on background estimate[J].Infrared Physics & Technology,2014,62(2):59-64.
[3] WANG Bo,ZHANG Jianqi.Moving dim point target detection based on the spatial and temporal combined filter[J].Journal of Xidian University:Natural Science Edition,2010,37(3):524-528.(in Chinese)
王博,张建奇.一种空时域结合滤波的运动弱小目标检测方法[J].西安电子科技大学学报:自然科学版,2010,37(3):524-528.
[4] ZHOU Jiao,XIN Yunhong.Infrared dim small target detection based on saliency and scale-space[J].Laser & Infrared,2015,45(4):452-456.(in Chinese)
周姣,辛云宏.基于显著性与尺度空间的红外弱小目标检测[J].激光与红外,2015,45(4):452-456.
[5] SI Maduan,LONG Yunli,AN Wei,et al.Infrared small target detection based on saliency and frame to frame difference[J].Aerospace Electronic Warfare,2015,31(4):32-35.(in Chinese)
司马端,龙云利,安玮,等.基于显著性与帧间差分的红外弱小目标检测[J].航天电子对抗,2015,31(4):32-35.
[6] WANG Yingying,HE Ping,LI Yongbin,et al.Fast IR target-detection method using Otsu algorithm based on bound histogram[J].Laser & Infrared,2014,44(5):577-581.(in Chinese)
王莹莹,何苹,李永宾,等.基于属性直方图的快速Otsu红外目标检测算法[J].激光与红外,2014,44(5):577-581.
[7] MA Ke,PENG Zhenming,HE Yanmin,et al.Improved non-downsampled Contourlet transform infrared dim small target detection method[J].High Power Laser and Particle Beams,2013,25(11):2811-2815.(in Chinese)
马科,彭真明,何艳敏,等.改进的非下采样Contourlet变换红外弱小目标检测方法[J].强激光与粒子束,2013,25(11):2811-2815.
[8] Drummond O E.Morphology-based algorithm for point target detection in infrared backgrounds[J].Proceedings of SPIE-The International Society for Optical Engineering,1993,1954:2-11.
[9] XUE Yonghong,RAO Peng,FAN Shiwei,et al.Infrared dim small target detection algorithm based on generating Markov random field and local statistic characteristic[J].Journal of Infrared and Millimeter Waves,2013,32(5):431-436.(in Chinese)
薛永宏,饶鹏,樊士伟,等.基于生成MRF和局部统计特性的红外弱小目标检测算法[J].红外与毫米波学报,2013,32(5):431-436.
[10] LIU Yanli.Research on target detection and tracking algorithm based on neural network[D].Wuhu:Anhui Polytechnic University,2013.(in Chinese)
刘艳丽.基于神经网络的运动目标检测与跟踪算法的研究[D].芜湖:安徽工程大学,2013.
[11] Sun X,Fang G.Infrared small targets detection based on MRF model[J].Procedia Engineering,2012,29(4):420-424.
[12] SUN Ting,QI Yingchun,GENG Guahua.Moving object detection algorithm based on frame difference and background subtraction[J].Journal of Jilin University:Engineering,2016,46(4):1325-1329.(in Chinese)
孙挺,齐迎春,耿国华.基于帧间差分和背景差分的运动目标检测算法[J].吉林大学学报:工学版,2016,46(4):1325-1329.
[13] ZHANG Zhongyu,JIAO Shuhong.Infrared ship target detection method based on multiple feature fusion[J].Infrared and Laser Engineering,2015,44(s):29-34.(in Chinese)
张仲瑜,焦淑红.多特征融合的红外舰船目标检测方法[J].红外与激光工程,2015,44(s):29-34.
[14] Hou X,Zhang L.Saliency detection:a spectral residual approach[C]//Computer Vision and Pattern Recognition,2007.CVPR ′07.IEEE Conference on.IEEE,2007:1-8.
猜你喜欢
环球时报(2022-05-23)2022-05-23
现代仪器与医疗(2022年1期)2022-04-19
金桥(2021年4期)2021-05-21
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
雷达学报(2017年3期)2018-01-19
火控雷达技术(2016年3期)2016-02-06
雷达与对抗(2015年3期)2015-12-09
海军航空大学学报(2015年1期)2015-11-11
