
机电类特种设备启动装置故障检测系统设计
2018-03-08 08:51明子涵张展彬
计算机测量与控制 2018年2期
明子涵,张展彬
(四川省特种设备检验研究院 信息中心,成都 610051)
0 引言
机电类特种设备已在多种环境中被广泛使用,常见的如商场的扶梯、客运索道、压力容器气瓶、大型游乐设施等,均是涉及生命安全且危险性较大的设备[1]。机电类特种设备的启动装置是控制特种设备正常运行,保证设备运行安全的重要装置,若启动装置发生了故障,则特种设备无法安全运行,致使发生各种危险[2]。对机电类特种设备启动装置的故障进行检测,可以有效提高启动装置的稳定性,确保特种设备安全运行[3]。当前我国特种设备启动装置故障检测水平较低,急需开发一种机电类特种设备启动装置故障检测系统,为故障检测提供帮助[4]。已有相关领域的专家学者设计出一些故障检测系统,具有一定的有效性。文献[5]系统采用直流接地的方法,设计出机电类特种设备启动装置故障检测系统,该系统检测精度较高,但检测效率较低,且CPU使用率较大。为解决上述问题,提出改进的机电类特种设备启动装置故障检测系统设计。先对系统硬件部分进行改进,充分分析骨架理论,对故障检测指标进行提取,计算故障检测频率,实现软件部分的故障检测功能,完成机电类特种设备启动装置故障检测系统的设计。实验验证,该系统检测精度高,检测效率高,CPU使用率低。
1 系统硬件设计
对机电类特种设备启动装置故障检测系统进行研究,先依据故障检测系统的功能需求对机电类特种设备启动装置故障检测系统的硬件部分进行优化设计。故障检测指示单元和数据处理传送单元是组成硬件最重要的两个部分。设计故障检测指示单元有效提高系统的检测精度。数据处理传送单元的优化是提高系统故障检测速率的有效途径。具体优化设计过程如下:
1.1 故障检测指示单元
根据故障检测系统硬件需求,将故障检测指示单元划分为4个子模块,分别是电流采集模块、电流突变检测模块,断电检测模块和报警模块。
电流采集模块是通过架空在线缆上的感应线圈进行交流电的采集[6]。采集过程中,需要对电流进行整流处理,将整流处理后的电流进行滤波,而后才能被其他检测模块所使用。采用两个简单二极管设计故障检测指示单元整流电流采集电路,电流采集电路如图1所示。

图1 电流采集电路设计图
将两个二极管和电阻并联接在感应线圈上,设定切断线圈导通状态,确保二极管将电磁释放的所有高压吸收,并消除开关电弧,感应线圈通过此过程采集到交流电,全桥电路在电流整流后得到两路相同直流电输出,作为电流突变检测模块和断电检测模块的输入。
电流突变检测模块是针对产生突变电流的情况下对故障进行检测。三相短路或是两相短路使出现的故障,会产生大量的突变电流。为了在突变电流下实施故障准确检测,需现将突变电流整流,整流后,优化处理多级微分电路,获得尖锐的脉冲信号,使用二极管,当产生突变电流时,选用低电平电压定位故障检测点,对检测点进行检测。
断电检测模块采用电阻和二极管组成的回路,在架空线路没有电流通过时,对故障点进行检测。
报警模块主要用于对故障检测点的故障信息做出报警提示。采用灯光闪烁的而形式,提示给远程巡检人员故障信息。
1.2 数据处理传送单元
数据处理传送单元主要由无线射频收发模块,双模通信模块,电源模块及核心控制模块组成。
无线射频收发模块采用RFID技术,即无线射频识别技术,对故障检测指示单元和数据处理传送单元之间的数据通信进行接收和发送。
双模通信模块采用RDSS射频收发芯片构建,其中还集成了功放芯片。通过这两种芯片及其他芯片配合协调,可有效实现RDSS收发信号,调制及解调等功能。该模块能够兼容本地串口,进行串口参数配置,实现对故障检测点的定位。
电源模块的供电电压要求保持在4.2 V,无线射频收发模块要求电源电压采用直流,且保持2.9~3.6 V之间[7],因此改进设计的数据处理传输单元的电源模块选用LM2575电压调整芯片,以满足电源供电电压的需求。供电过程中,将可充蓄电池的电压调整到4.2 V,在固定输出电压,从而设计出稳定供电电源。
核心控制模块等同于系统硬件的大脑,可保障系统运行的安全性、稳定性和低功耗性。采用PIC16F883组建核心控制模块。给出核心控制电路如图2所示。
图2 核心控制电路图
综上所述,分别对故障检测指示单元和数据处理传送单元进行优化,完成机电类特种设别启动装置故障检测系统硬件部分的设计,为系统软件设计提供最优的硬件环境。
2 系统软件设计
2.1 基于骨架理论故障检测指标的提取
骨架被称作中轴线,为物体最大内接圆圆心轨迹,将和节点p之间距离低于k跳的全部节点称作节点p的k跳邻居。
在物理学中,散度是空间不同点矢量场发散强弱程度的体现,为场的有源性。F点的散度可描述成:
∂VFdS
(1)
其中:F用于描述矢量场;V用于描述闭合曲面S围成空间占整个空间的体积。
骨架是在连续域的基础上提出的,故障检测系统节点处于离散状态[8],因此为了得到离散域的骨架,需再次对散度进行定义,依据连续域的散度,给出离散域的散度概念。
定义1:针对某点p,其散度是:
(2)
其中:F(p)用于描述节点p转发故障数据包个数;R(p)用于描述节点p接收故障数据包个数;Nr(p)用于描述节点p的r跳邻居;λ(Nr(p))用于描述Nr(p)个数。
节点p的散度为节点p的r跳邻居转发的故障数据包总和与接收故障数据包总和之差的均值。
定义2:散度是负的系统节点被称作骨架节点。
节点随机性会导致节点分布不均匀,为了达到更高的鲁棒性,在divp<δ的情况下,可按照实际状态完成修正[5]。
定义3:针对骨架节点p的k邻居节点中某两个骨架节点p1和p2,p1至p2在k邻居的跳数距离和p1至p2沿骨架传输的跳数距离之比被称作骨架节点p的骨架曲率[9],也就是:
C(p)=lk_net/lk_sk
(3)
其中:lk_net用于描述p1至p2在k邻居的跳数距离;lk_sk用于描述p1至p2沿骨架传输的跳数距离。
机电类特种设备启动装置中,依据节点与骨架点之间的距离对J2EE层进行划分,将与某骨架点距离最短的全部点划分成一层[5]。
定义4:节点p与骨架线之间的跳数距离与节点p与边界之间的跳数距离之比被称作故障检测指标,对故障检测指标的提起用如下表达式:
I(p)=lps/lpb
(4)
其中:lps用于描述节点p与骨架线之间的跳数距离;lpb用于描述骨架节点p与距离最短边界的跳数距离。
利用上述公式,基于骨架理论,准确提取出机电类特种设备启动装置的故障检测指标。
2.2 故障检测频率的计算
特种设备启动装置故障检测频率为故障检测的重要条件,用户在一定程度上会依据故障检测频率,将一段时间内检测次数较少的故障从一级检测转移至二级检测[9]。然而由于每天的故障检测次数都在不断变化,因此,每天的检测频率均不相同。若依据最近一段时间的故障检测频率对检测方式进行判断,则系统记录故障数量规模将很大,增加检测开销。所以本节仅允许用户选择三种频率:最近一个月、一个季度及一年的故障检测频率。
所以在对特征设备管理故障进行检测的过程中,需对故障检测频率进行特别分析。
用A-n描述此刻起之前第n天任意特征启动设备故障的检测次数。Ao用于描述当天故障检测次数,则在没有添加当天统计故障的情况下,n天中故障总检测次数S可描述成:
(5)
添加当天统计故障后,n天内故障检测次数S′可描述成:
(6)
分析上式可知,为了对一年内故障检测次数进行统计,需对这段时间内每天的故障检测次数进行统计,计算开销大。选用一个近似公式求解频率值。假设针对某特种设备管理故障,往前第n天访问量为过去n天的均值,则有:
(7)
(8)
则针对所有特种设备管理故障,仅需统计一段时间内检测次数之和,以及当天故障检测量即可获取相应故障的检测频率值,大大降低了计算开销。
2.3 故障检测的实现
依据机电类特种设备启动装置不同寿命周期阶段的消耗统计特征进行故障检测,结合库存安全量,获取跟随实际需求曲线的设备启动装置故障检测结果。
假设某特种设备启动装置在某个月的故障信号用C1进行描述,实际故障用C2进行描述,当月预期故障用C3进行描述。该设备目前市场价格用T进行描述,大规模故障用P1进行描述,单位故障检测耗能用P2进行描述,单位故障检测效率用P3进行描述,占用启动装置能耗用I进行描述,则故障检测模型建立过程可描述如下:
1)故障检测数据库存当月实际已经检测的故障数据量F1=C2-C3;
2)在|F1-C1|≤T的情况下,设备启动装置实际故障既定区间进行检测。
3)在|C1-F1|>T的情况下,设备启动装置实际故障检测结果低于故障检测系统检测设定值,系统将出现预警,依据故障检测模型检测表达式为F2=(C1+T-F1)/T;
4)在F1-C1>T的情况下,设备实际故障数据量高于系统设定故障数据量,需进行进一步判断确定库存决策;
5)超储配件的额外库存所需花销为F3=(F1-C1-T)°P3°I,转让配件折旧花销可描述成F4=(P1-P2)°T;在F3>F4的情况下,系统会提交库存故障检测结果对比请求;否则,系统将保持现状。
通过故障检测模型,检测特种设备启动装置的故障。
根据以上步骤,先对硬件部分进行改进,依据骨架理论,对故障检测指标进行提取,计算故障检测频率,通过故障检测的实现,完成软件部分的优化,从而实现机电类特种设备启动装置故障检测系统的设计。
3 实验结果分析
为了验证改进设计的机电类特种设备启动装置故障检测系统的性能,需对设计系统进行严格的测试。实验通过matlab组建实验环境,分别对CPU使用率、故障检测精度、故障检测效率三个方面进行测试。具体描述如下:
3.1 系统CPU使用率测试
在设计的机电类特种设备启动装置故障检测系统中,将故障检测数据量从1K升高至128M,分别采用传统故障检测系统和改进设计的机电类特种设备启动装置故障检测系统进行CPU使用率测试,测得两种系统的CPU使用率结果如图3所示。
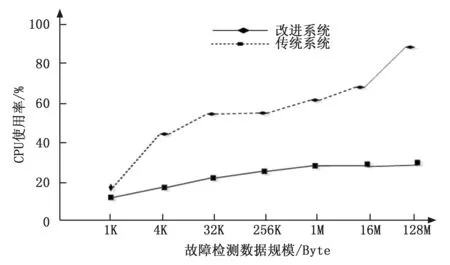
图3 两种不同系统CPU使用率对比结果
观察图3可知,采用传统系统对启动装置进行故障检测,其CPU使用率随着故障检测数据规模的增大而增大,且增大幅度越来越大。当故障数据为128M时,CPU使用率达到了85%,会导致CPU出现卡顿现象,致使故障检测速率慢。采用改进系统对启动装置进行故障检测,其CPU使用率随故障检测数据规模增大的幅度较小,当故障检测数据规模为128M时,CPU使用率只有22%。对比传统系统和改进系统的CPU使用率,改进系统的CPU使用率远远小于改进系统的CPU使用率,实验结果充分说明,改进系统的CPU使用率更低,系统运行效果更好,验证了改进系统的可行性。
3.2 系统故障检测精度测试
故障检测精度是所设计的机电类特种设备启动装置故障检测系统性能检测的最重要指标。检测精度的高低直接影响故障检测系统性能的优劣。分别对改进系统、哈希系统和SISR系统的故障检测精度进行测试,测得三种不同系统的故障检测精度对比结果如图4所示。
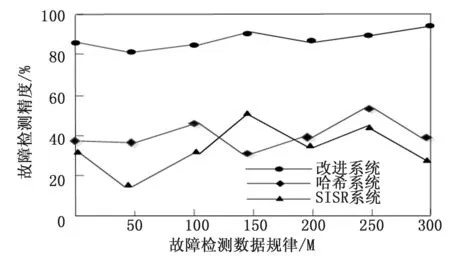
图4 三种不同系统故障检测精度对比结果
分析图4得知,采用哈希系统对启动装置进行故障检测,其故障检测精度曲线波动较大,平均检测精度值约为40%,当故障检测数据为250M时,出现最大检测精度为55%。采用SISR系统对启动装置进行故障检测,其故障检测精度曲线波动相较于哈希系统更大,平均检测精度值约为35%,当故障检测数据为150M时,出现最大检测精度为58%。采用改进系统对启动装置进行故障检测,其故障检测精度曲线波动较小,基本保持在90%左右,且随着故障检测数据规模的增大呈上升趋势。对比哈希系统、SISR系统和改进系统的实验结果,改进系统的平均故障检测精度远远高于哈希系统和SISR系统的平均故障检测精度。经试验验证,改进系统的故障检测精度更高,说明了改进系统的实用性。
3.3 系统故障检测效率测试
本节在EVEN模式、ODD模式、FOLD模式下,通过平均每秒事务数、平均事务响应时间、CPU使用率和内存使用率对系统自身硬件性能进行评价。三种系统评价结果用表1进行描述。
故障检测效率是验证所设计的机电类特种设备启动装置故障检测系统有效性的重要指标。故障信号的响应时间能够充分反映出故障检测效率,分别在EVEN模式、ODD模式、FOLD模式下,对改进系统、哈希系统和SISR系统的平均故障信号响应时间进行测试,得到3种不同系统在3种模式下的平均故障信号响应时间对比结果如表1所示。
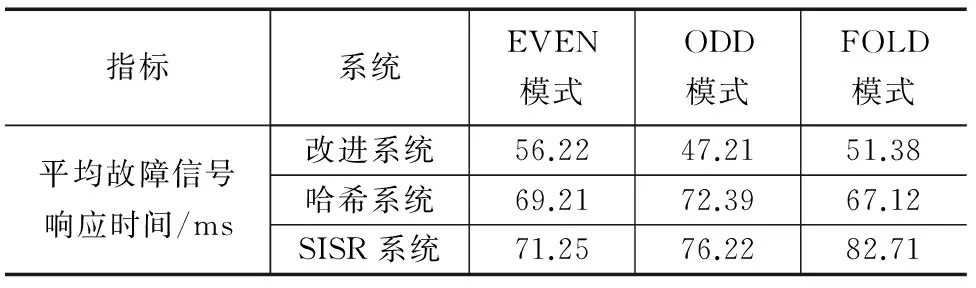
表1 3种系统3种模式下平均故障信号响应时间对比
由图5可知,在EVEN模式下,哈希系统的平均故障信号响应时间为69.21ms,SISR系统的平均故障信号响应时间为71.25ms,改进系统的平均故障信号响应时间为56.22ms。在ODD模式下,哈希系统的平均故障信号响应时间为72.39ms,SISR系统的平均故障信号响应时间为76.22ms,改进系统的平均故障信号响应时间为47.21ms。在FOLD模式下,哈希系统的平均故障信号响应时间为67.12ms,SISR系统的平均故障信号响应时间为82.71ms,改进系统的平均故障信号响应时间为51.38ms。对比三种模式下,三种系统的平均故障信号响应时间,哈希系统的响应时间比SISR系统的响应时间短,而改进系统的响应时间远远小于这两种系统的响应时间,实验结果充分说明,改进系统的平均故障信号响应时间更
短,故障检测实时性更好,故障检测效率更高,验证了改进系统的有效性。
综合以上实验结果得出,改进设计的机电类特种设备启动装置故障检测系统具有检测精度高、CPU使用率低、检测效率高等优点,具有一定的实用性和可行性。
4 结论
为解决传统故障检测系统检测精度低、效率低、内存占用率高等问题,提出设计一种机电类特种设备启动装置故障检测系统。改进硬件部分的故障检测指示单元和数据传输处理单元;以骨架理论为依据,对故障检测指标进行提取,计算故障检测频率,实现软件部分的故障检测功能,完成机电类特种设备启动装置故障检测系统设计。通过实验验证,该系统检测精度高,CPU使用率低,且效率高。但在系统稳定性方面,仍需深入研究,改进系统稳定性,以满足故障检测系统的需求。
[1] 武唯强, 闫 杰, 温 琦. 基于广义似然比的冗余惯组故障检测方法研究[J]. 电子设计工程, 2015, 23(5):64-66.
[2] 王博磊, 崔彦平, 鲁朝静. 基于传动误差检测法的齿轮故障测试系统设计[J]. 机械传动, 2017(2):157-160.
[3] 唐金城, 缪希仁, 张丽萍. 基于DSP的低压配电线路电弧故障检测系统[J]. 电工电能新技术, 2015(2):72-75.
[4] 施一新, 杨 林, 杨 坤. 电动汽车高压电连接电阻故障测试系统开发[J]. 汽车技术, 2016(8):48-52.
[5] 史 珂. 航天器发动机故障信号的有效检测仿真[J]. 计算机仿真, 2015, 32(7):19-22.
[6] 王 焘, 张文博, 徐继伟,等. 云环境下基于统计监测的分布式软件系统故障检测技术研究[J]. 计算机学报, 2017, 40(2):397-413.
[7] 何华锋, 王 彬, 张晓雨,等. 某型导弹标调瞄组合智能故障检测系统设计[J]. 电光与控制, 2016(6):77-79.
[8] 乔恕立, 闫文吉, 李仙丽,等. 航空发动机电气故障检测系统设计[J]. 燃气涡轮试验与研究, 2016, 29(4):43-46.
[9] 李志军, 梁乐乐, 韩存武,等. 基于PLS的多采样率过程故障检测及其仿真[J]. 计算机仿真, 2016, 33(10):445-449.
猜你喜欢
江苏安全生产(2022年9期)2022-11-02
起重运输机械(2021年16期)2021-12-31
中国科技纵横(2020年10期)2020-10-27
综艺报(2019年5期)2019-03-18
劳动保护(2018年8期)2018-09-12
魅力中国(2017年30期)2017-08-17
魅力中国(2017年1期)2017-05-08
汽车文摘(2015年11期)2015-12-14
中国新技术新产品(2013年4期)2013-08-15
