
人机交互中的虚拟生物特征模糊判定系统设计
2018-03-08 08:53马媛媛
计算机测量与控制 2018年2期
马媛媛,陈 鹏
(1.中国人民解放军第四二二医院 经济管理科,广东 湛江 524000;2.中国人民解放军第四二二医院 信息技术科,广东 湛江 524000)
0 引言
对虚拟生物特征进行判定是研究计算机图形学和生命学的重要内容。虚拟生物是虚拟现实系统中不可缺少的部分,它具有沉浸感、智能性和交互性等特征[1]。为了提供一个可交互的、生动的、真实的判定空间,需要对虚拟生物特征模糊判定系统进行深入研究[2]。虚拟生物特征模糊判定系统一经提出,便引起了很多专家学者和业内人士的关注。传统基于区域特征映射的虚拟生物特征模糊判定系统[3],根据图像模糊原理,建立等价模型,获取虚拟生物模糊纹路进行处理,完成虚拟生物特征的模糊判定,该系统效率较低,判定结果准确度低。基于特征模糊识别的虚拟生物系统[4],对虚拟生物识别算法进行改进,引入模糊数学方法,模糊识别特征量,完成虚拟生物特征的模糊判定,该系统实时性较低。现使用计算机构造虚拟现实世界的人机交互技术,可对虚拟生物特征进行精准模糊判定,提高虚拟生物特征模糊判定系统的判定结果准确度[5]。为解决以上系统存在的问题,提出通过人机交互技术对虚拟生物特征模糊判定系统进行优化设计。实验结果表明,该系统的效率高、判定结果准确度高、实时性高。
1 系统硬件结构及原理
要对人机交互中的虚拟生物特征模糊判定系统进行设计,先要对系统硬件结构及其工作原理进行分析。给出系统硬件结构图如图1所示。
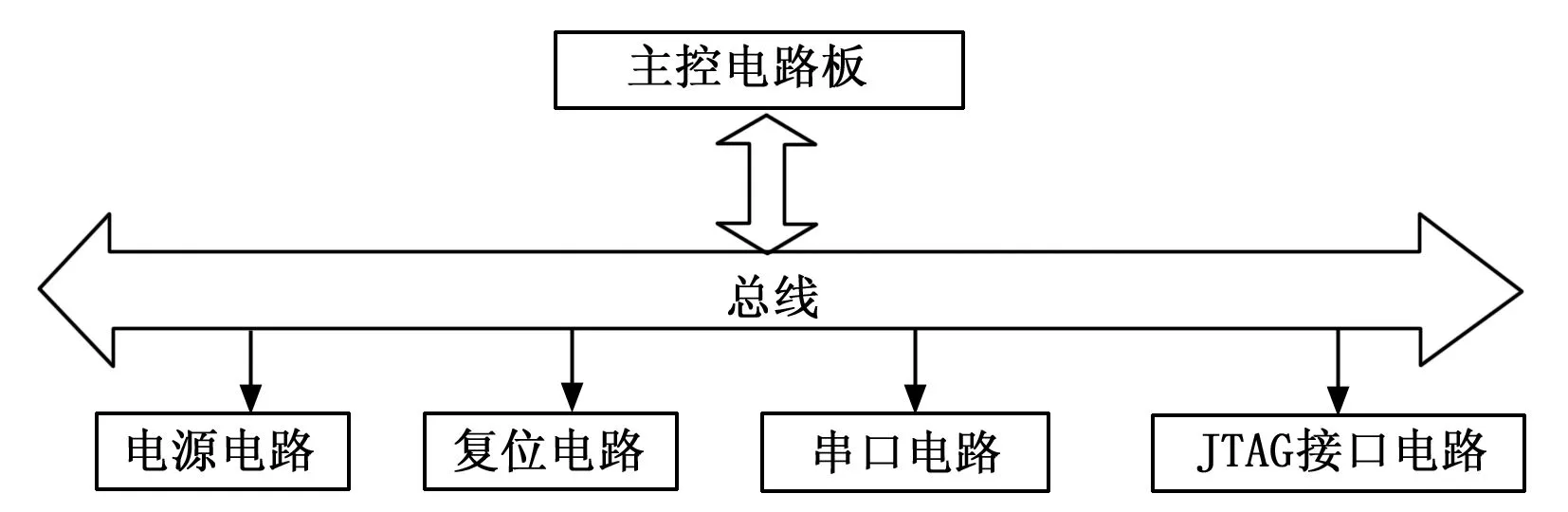
图1 系统硬件结构图
由图1可知,人机交互的俄虚拟生物特征模糊判定系统的硬件结构以总分形式构建。主控电路板起到整体电路调控作用,是硬件结构的核心。由总线连接各子电路,起到数据接收、传输、发送等作用。电源电路为系统提供持久供电,是系统稳定安全运行的保障,复位电路对启动信号进行监控处理;串口电路主要负责片选控制,JTAG接口电路对兼容仿生器进行调试,以上硬件的合理配置,协同作业完成生物特征的模糊判定。
2 系统硬件设计
在人机交互中的虚拟生物特征模糊判定系统中对核心主板功能进行支撑的是判定系统的扩展板。扩展板由电源电路、复位电路、串口电路和JTAG接口电路构成,系统根据这些接口外接与设备进行连接。
2.1 电源电路
人机交互中的虚拟生物特征模糊判定系统的基础是电源部分,电源部分对判定系统的稳定起到关键作用,改进系统对用电量进行优化控制,满足系统低功耗和高性能的要求。
人机交互中的虚拟生物特征模糊判定系统的内核电压为1.3 V,储存器需要的电压为3.3 V。人机交互中的虚拟生物特征模糊判定系统中包括图像采集,选择适当的光源电路进行图像采集,采用正负12 V的直流稳压接口[6]。
总电源采用220 V转正12 V的外界电源。总电源12 V共分为两支,第一支与DLM05-12D12电源相连为图像采集的电路提供电源接口,第一支电路的输出正负电压为12 V。第二支与系统电源稳压芯片的输入端相连为LCD和摄像头供电,第二支电路的输出端产生+5DC。通过将第二支电路产生的+5DC分流到人机交互中的虚拟生物特征模糊判定系统电源稳压AMS1117芯片的输出端,产生的+3.3 VDC为系统的储存器供电。
2.2 复位电路
人机交互中的虚拟生物特征模糊判定系统中复位的设计是定位系统在一个可知的状态,复位电路的信号需要与时钟电路的信号保持一致要求复位电路能够可靠的、快速的工作[7]。判定系统中的复位电路是整个系统运行的开端为ARM的启动提供信号。RESET是判定系统中ARM的复位信号,当复位信号有效时,判定系统的复位将由系统的内部产生,将RESET挂起程序放在人机交互中的虚拟生物特征模糊判定系统ARM的复位状态中,当电源稳定时,RESET的周期不能少于4,且必须保持低电平。
图2为人机交互中的虚拟生物特征模糊判定系统的复位电路图,人机交互中虚拟生物特征模糊判定系统中复位电路的工作原理如下,将判定系统通电,电容C20通过电阻R7进行充电,电容C20未达到门限电压的高电平时,RESET端输出的电压为低电压,此时判定系统为复位状态。当电阻C20在门限电压中达到高电平时,RESET端输出的电压为低电压,此时判定系统的状态为工作状态。
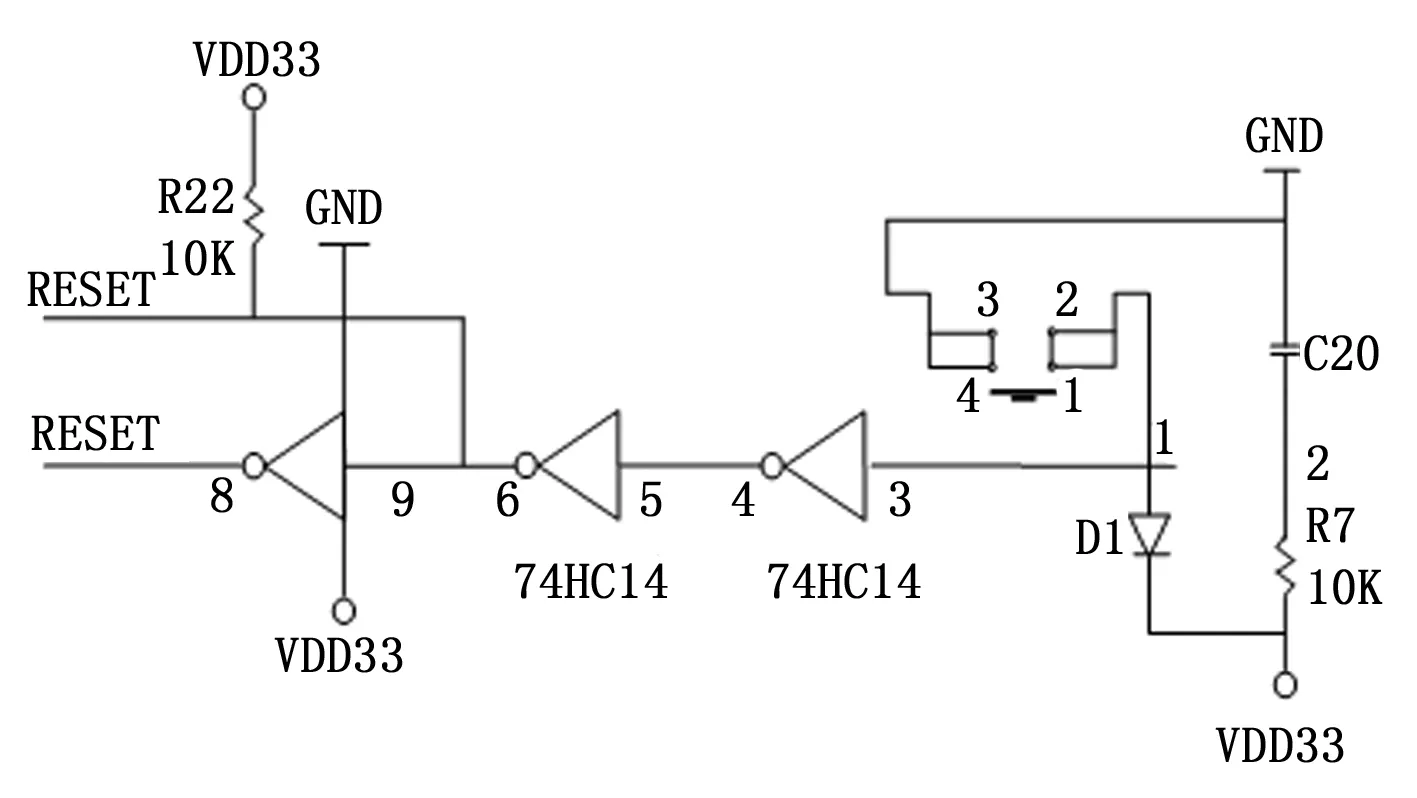
图2 系统复位电路图
复位电路主要是在CPU正常工作的情况下,对复位计时器进行定时,设置复位计时器的上限值,以确保在CPU出现故障,不能正常工作时,复位计数器不会超过这个上限值,从而降低复位电路出现故障的风险。提高复位电路的可靠性,主要取决于复位芯片的选取。同样专业的复位芯片也有助于复位电路可靠性的分析。所设计的人机交互中虚拟生物特征模糊判定系统的复位电路选用MAX813L复位芯片,其功能十分强大,主要包括上电复位、看门狗输出、电压监视、手动复位四大功能。合理利用MAX813L复位芯片的各项功能,通过分析每一项功能的工作原理,对复位电路进行优化。
2.3 串口电路
人机交互的虚拟生物特征模糊判定系统的必要措施是调试阶段中的串口通信,当前最广泛的串行标准是ARM和PC机进行通信[8]。低速率串行通信的单端标准为RS-232,人机交互中的虚拟生物特征模糊判定系统为两路串口,人机交互中的虚拟生物特征模糊判定系统中MAX3232ECAE芯片组合成的串口电路如图3所示。
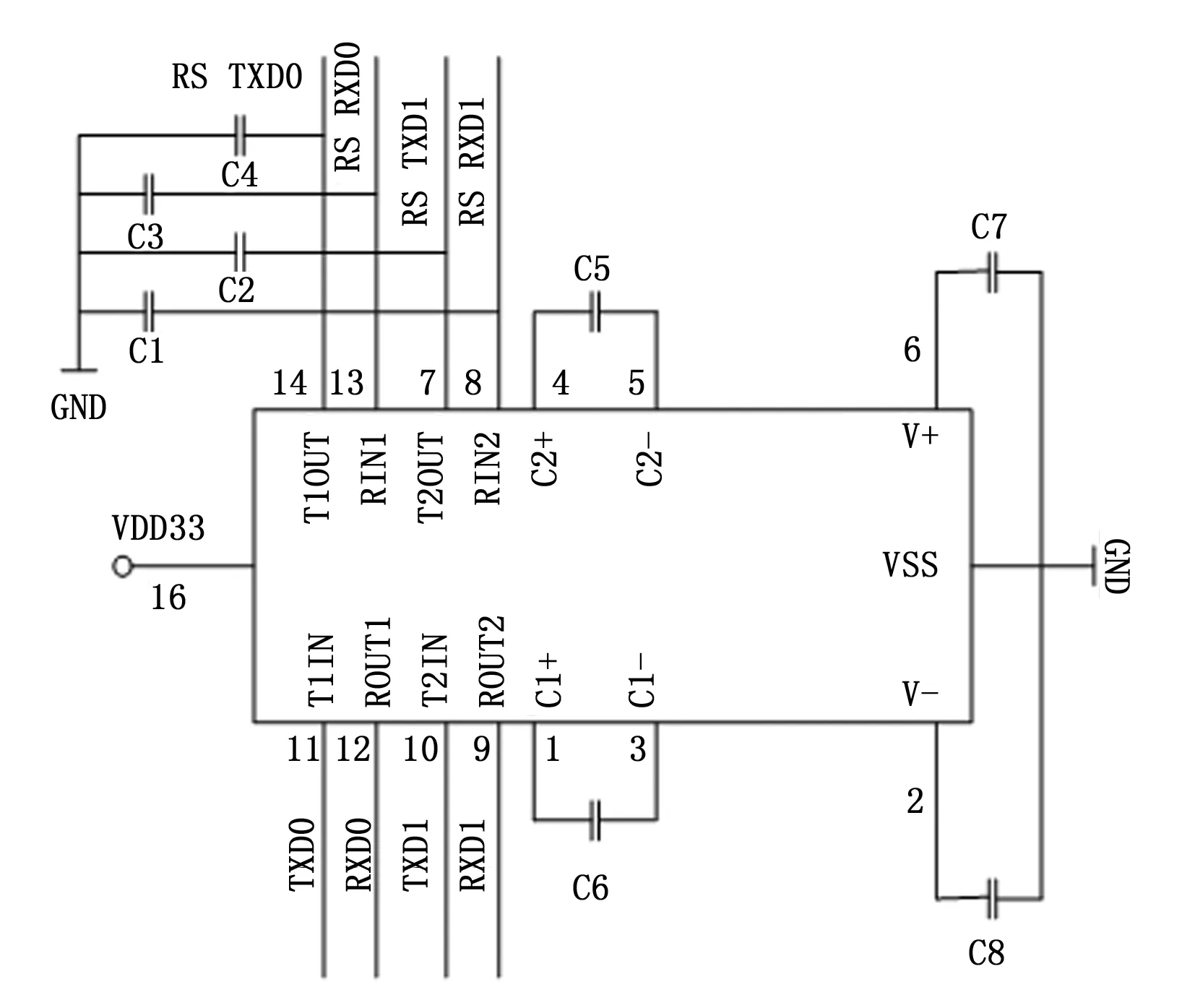
图3 串口电路
串口电路主要负责片选控制,采用微处理器作为中断,使人机交互中虚拟生物特征模糊判定系统的两路串口能够共用一个中断。当出现有效中断使能信号时,将中断是能信号发送给处理器。系统硬件的驱动层在处理器接收到中断使能信号时,做出实时响应。整个中断服务过程,处理器会按照接收中断使能信号的顺序,逐个地检查来自串口的中断源。因此对人机交互中虚拟生物特征模糊判定系统硬件部分的串口电路进行优化设计至关重要。
2.4 JTAG接口电路
在人机交互中的虚拟生物特征模糊判定系统中IEEE的标准为JTAG,JTAG的扫描链判定系统ARM的内部,可以对判定系统的ICE-RT逻辑进行配置和调试。为了对判定系统中的Multi-ICE兼容仿真器进行调试,需要在判定系统的目标板中安置20芯的JTAG接口,JTAG端口的定义如表1所示。
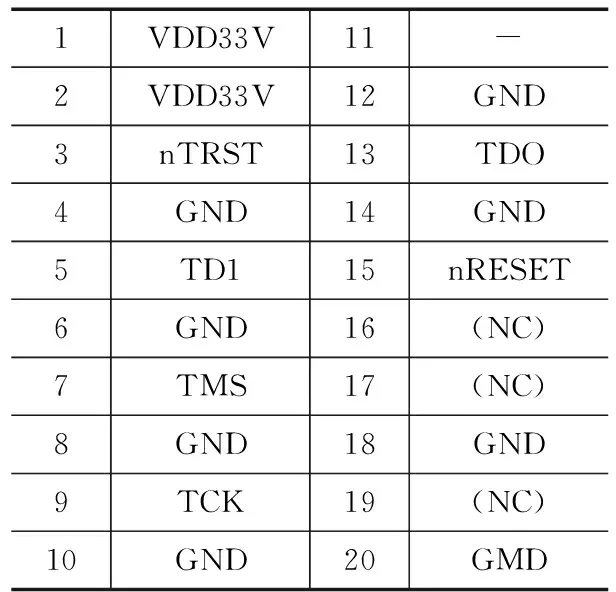
表1 JTAG端口定义
人机交互中的虚拟生物特征模糊判定系统中U-Boot目标板中的启动代码主要由JTAG编写[9]。
综上所述,对各电路进行优化,完善其功能,实现人机交互中的虚拟生物特征模糊判定系统硬件部分的设计,为系统软件设计提供良好的硬件环境。
3 系统软件设计
引入模糊识别算法对人机交互中的虚拟生物特征模糊判定系统软件部分进行设计。图像预处理和虚拟生物特征模糊恢复是软件设计过程中最关键的两个部分。图像的预处理为虚拟生物特征模糊恢复奠定良好的基础,加快恢复速率。对虚拟生物特征进行模糊恢复可有效提高系统软件判定结果的准确度。
3.1 图像预处理
在人机交互中的虚拟生物特征模糊判定系统中图像预处理的主要功能是对虚拟生物图像进行灰度化,是虚拟生物图像去模糊的基础。造成图像模糊化的主要原因是成像设备存在的相机抖动、散焦等问题。将模糊图像复原的方法颇多,例如信息叠加法、正推迭代法、递进复原法等等。在人机交互中的虚拟生物特征模糊判定系统中的彩色图像转换为灰度的图像称为虚拟生物图像的灰度化处理。R、G、B三个分量分别在彩色虚拟生物图像中的像素中存在,R、G、B三个分量分别可以取255种值[10]。
在对图像进行去模糊的过程中,先要设计图像模糊点扩散函数,计算图像模糊点的扩散值,依据模糊点的扩散值,基于模糊识别算法构建图像去燥模型。对去燥模型进行重构,需要模糊图像和真实图像,模糊核矩阵,噪声干扰强度及卷积运算综合处理。图像的去模糊过程可以理解为,利用卷积运算将一幅图像的模糊信息转换成模糊核矩阵,根据模糊核矩阵,进行深入去模糊计算。图像去模糊的本质就是图像模糊的反过程。
在人机交互中的虚拟生物特征模糊判定系统中的灰度化处理分为两种。一是平均值法,对虚拟生物图像中每个像素点的R、G、B分量进行平均求值,得到的平均值作为虚拟生物图像的灰度值。二是利用YUV编码规则,其中Y代表的是虚拟生物图像像素的亮点,通过虚拟生物图像像素中的亮点进行灰度值的表示。
3.2 虚拟生物特征模糊恢复
特征模糊恢复是人机交互中的虚拟生物特征模糊判定系统软件部分的核心,可将原始无法识别的虚拟生物模糊特征进行正确的判定,可将通过灰度化处理的虚拟生物图像变为清晰虚拟生物图像。图4为引入模糊识别算法的虚拟生物特征模糊恢复流程图。
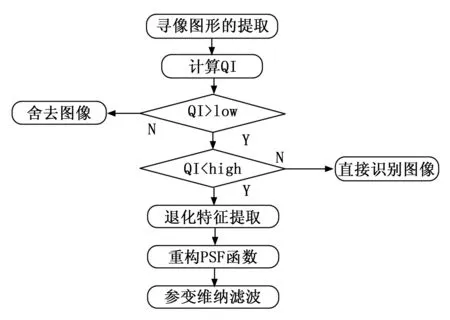
图4 虚拟生物特征模糊恢复流程图
分析图5可知,采用模糊识别算法,首先对虚拟生物图像的寻像图形进行提取,对提取后的虚拟生物图像寻像图形区域的QI值进行计算,根据QI值的大小评估虚拟生物图像的特征模糊程度,若虚拟生物图像中的QI值小于下限阈值,舍去图像;若虚拟生物图像中的QI值大于上限值,对虚拟生物图像进行直接识别;若虚拟生物图像中的QI值在上下阈值中,对虚拟生物图像中的退化特征信息进行提取,重构PSF函数,采用参变维纳滤波算法对虚拟生物图像进行去卷积的操作,得到清楚的虚拟生物图像。
3.2.1 灰度方差算法
人机交互中的虚拟生物特征模糊判定系统的虚拟生物特征模糊图像的灰度方差定义如下式所示:
(1)
其中:g代表的是虚拟生物模糊图像的灰度平均值,s代表的是虚拟生物图像的灰度值平均差,灰度方差算法参考虚拟生物图像的像素灰度平均值,对虚拟生物图像中每个像素点的灰度值进行平均差的计算,当虚拟生物图像的灰度值平均差越大时,虚拟生物图像越清晰,当虚拟生物图像中的灰度值平均差越小时,虚拟生物图像越模糊。
3.2.2 灰度差分的绝对值之和算法
如公式(2)所示,将x方向、y方向虚拟图像差分绝对值的和作为人机交互中的虚拟生物特征模糊判定系统中模糊度的度量,虚拟生物图像的特征模糊程度用灰度差绝对值表示:
(2)
在人机交互中的虚拟生物特征模糊判定系统中虚拟生物图像的模糊程度越深,梯度变化越慢,选用参数梯度设计判定系统中的模糊估计函数,每个虚拟生物图像中像素点的梯度公式如下:
G(x,y)=(f(x+1,y),f(x,y+1))
(3)
在人机交互中的虚拟生物特征模糊判定系统中梯度模的公式为:
Mg=[f(x+1,y)2+f(x,y+1)2]
(4)
当虚拟生物图像窗口的高为H,宽为W时,虚拟生物图像灰度梯度模的平均值计算公式为:
(5)
在人机交互中的虚拟生物特征模糊判定系统中虚拟图像的寻像图形为固定的,虚拟图像不会产生三个寻像区域的变化,所以将该区域中的像素集作为人机交互中的虚拟生物特征模糊判定系统模糊函数的判定标准。
综上所述,通过对电源电路、串口电路等硬件部分进行设计,引入模糊识别算法对软件部分进行完善,完成人机交互中虚拟生物特征模糊判定系统的设计。
4 实验结果分析
本次实验在Matlab7.1平台中完成,Windows7为本次实验的操作系统,为了验证人机交互中的虚拟生物特征模糊判定系统的性能,需要对人机交互中的虚拟生物特征模糊判定系统进行测试。
所设计的人机交互中虚拟生物特征模糊判定系统在进行虚拟生物的特征模糊判定时,根据灰度值的不同将虚拟生物图像分为不同的区域,对虚拟生物的模糊特征进行校正,采用参变维纳滤波算法建立虚拟生物模糊特征集,对虚拟生物特征模糊判定的效率进行大幅度的提升。分别采用改进系统和传统系统进行判定效率测试,多次试验记录两种不同系统的判定时间,对比两种不同系统的判定效率,对比结果如图5所示。

图5 两种不同系统的对比结果
分析图6可知,传统系统的判定时间平均保持在60s左右,在第10次实验时,出现了最大判定时间,为65s。在第2次实验时,判定时间最小,为55s。改进系统的判定时间平均保持在18s左右,在第6次实验时,出现了最大判定时间,为21s。在第5次实验时,判定时间最小,为5s。对比改进系统和传统系统的实验结果,改进系统的判定时间远远少于改进系统的判定时间,充分说明改进系统的判定效率更高。
s代表的是虚拟生物图像的灰度值平均差,当虚拟生物图像的灰度值平均差越大时,虚拟生物图像越清晰,判定的结果越精准。为了测试人机交互中的虚拟生物特征模糊判定系统的判定准确度,通过参数s对人机交互中的虚拟生物特征模糊判定系统进行测试,分别采用改进和传统系统进行对比,对比结果如表2所示。
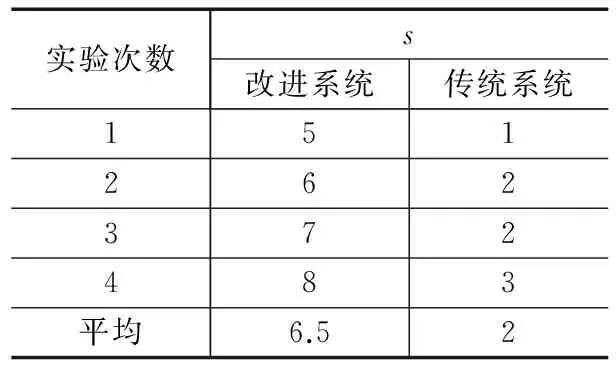
表2 两种不同系统的对比
分析表2可知,在四次实验中改进系统的参数s平均值为6.5,传统系统的参数s的平均值为2。对比两种系统的测试结果可知,改进系统的参数s要远远高于传统系统的参数s,因为虚拟生物图像的灰度值平均差越大时,虚拟生物图像越清晰,判定的结果越精准,验证了改进系统的判定准确度更高。
实时性是衡量人机交互中虚拟生物特征模糊判定系统运行速度的一个重要指标,决定着系统能否得到广泛应用。对人机交互中的虚拟生物特征模糊判定系统的实时性进行测试,在各种条件都相同的条件下,分别采用改进系统和传统系统进行测试,记录两种不同系统的判定信号情况,对比两种系统的实时性对比结果如图6所示。
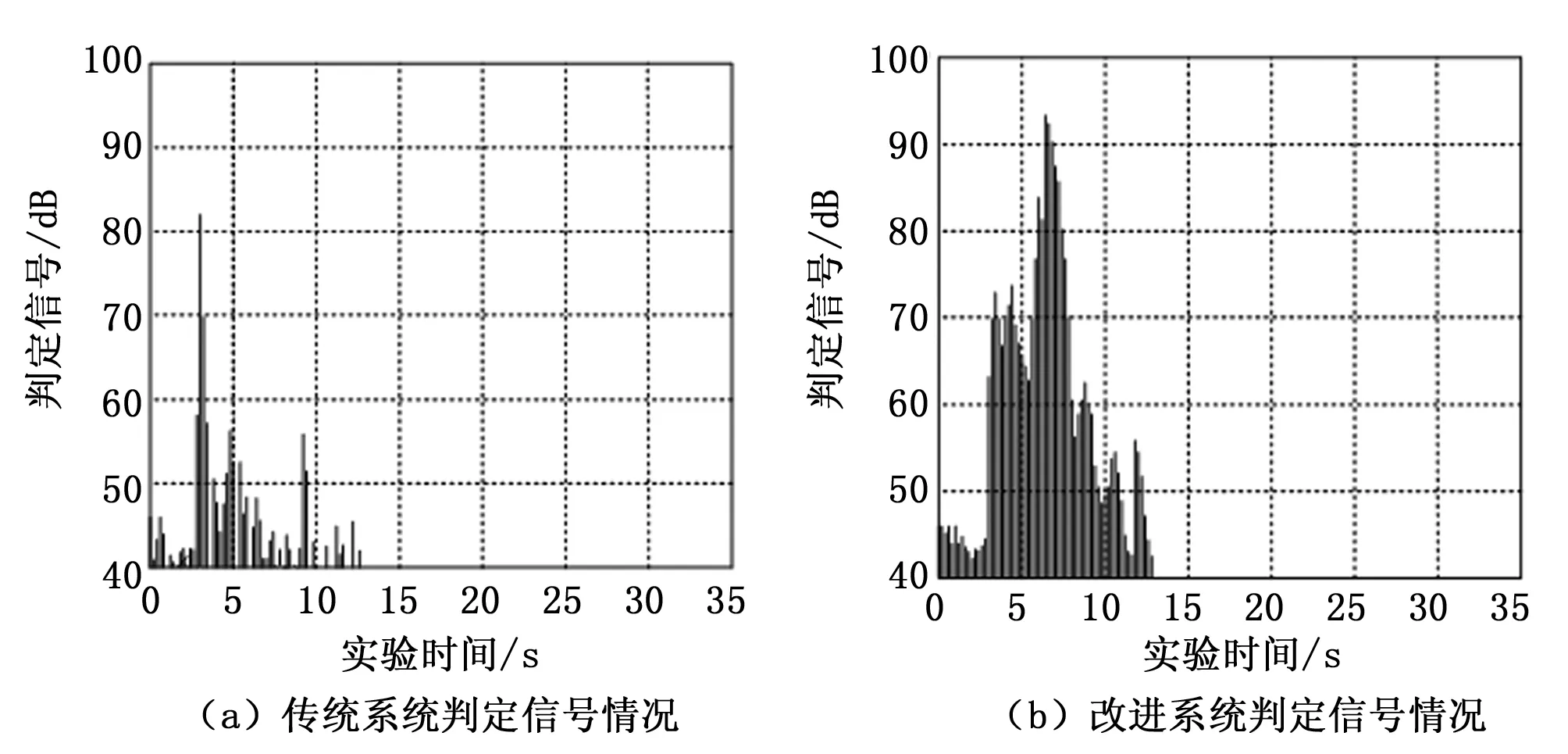
图6 两种不同系统的实时性测试结果
观察图6可知,图6(a)为传统系统的判定信号情况,改进系统的判定信号整体较弱,其平均信号值约为45dB,当实验时间为4s时,判定信号达到最大值是82dB。且实验过程中,常出现判定信号为零的现象,系统的实时性较低。图6(b)为改进系统的判定信号情况,传统系统的判定信号整体较强,平均判定信号值约为75dB,当实验时间为7s时,判定信号达到最大值是93dB。对比传统系统和改进系统的测试结果,相较于传统系统,改进系统的判定信号大幅度增强,充分说明改进系统的实时性更高,验证了改进系统的实用性。
综合以上实验结果可知,所设计的人机交互中虚拟生物特征模糊判定系统效率高、判定结果准确度高、实时性高,具有一定的有效性和实用性,满足虚拟生物特征模糊判定系统的设计需求。
5 结论
提出设计了一种人机交互中虚拟生物特征模糊判定系统,经过实验验证,该系统效率高、判定结果准确度高、实时性高,充分解决了当前虚拟生物特征模糊判定系统存在的种种问题。具有较好的实用性。但在判定系统的运行能耗方面,还存在一些不足,未来将针对系统运行能耗的问题进行深入研究,对人机交互中虚拟生物特征模糊判定系统进行完善,为虚拟生物特征的模糊判定提供参考。
[1]王 伟,徐平平,王华君. 基于生物特征识别和一次性口令的电子商务安全交易方案[J]. 电子设计工程,2016,24(9):24-27.
[2] 路晓亚,杜丽娟. 模糊生物图像特征优化提取仿真研究[J]. 计算机仿真,2017,34(5):397-400.
[3] 郑 杰,李建平. 一种基于生物特征匹配的未知协议比特流分类方法[J]. 科技通报,2016,32(11):214-217.
[4] 丁 佳,张 娟,王索刚. 基于视觉双特征的并行联合脑-机接口范式的研究[J]. 科学技术与工程,2015,15(10):37-41.
[5] 胡瑞钦,张立建,孟少华. 基于OpenCV的图像椭圆特征识别与定位研究[J]. 计算机测量与控制,2016,24(12):116-118.
[6] 林 森,吴 微,苑玮琦. 采用纹理近邻模式的掌静脉生物特征识别研究[J]. 仪器仪表学报,2015,36(10):2330-2338.
[7] 李海霞,张 擎. 结合并行融合的序列化多模态生物特征识别系统框架[J]. 计算机应用,2015,35(10):2789-2792.
[8] 魏伟波,洪丹枫,潘振宽,等. 基于区域特征映射的模糊掌纹识别方法[J]. 自动化学报,2015,41(2):386-395.
[9] 李怀俊,谢小鹏. 基于核特征模糊聚类及模糊关联熵的齿轮故障模式识别[J]. 仪器仪表学报,2015,36(4):848-855.
[10] 王玉坤,高炜欣,汤 楠,等. 基于模糊模式识别的人体姿态识别[J]. 计算机工程与设计,2016,37(6):1621-1625.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
初中生学习指导·中考版(2022年4期)2022-05-12
气象水文海洋仪器(2021年3期)2021-10-15
天津医科大学学报(2021年1期)2021-01-26
计算机技术与发展(2020年4期)2020-04-30
现代计算机(2020年3期)2020-03-05
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
电子制作(2018年14期)2018-08-21
