磁致伸缩位移传感器的设计与实现
2018-03-07 01:33:53李学胜魏韶辉孙颖奇卢欣春
水电与抽水蓄能 2018年1期
李学胜,魏韶辉,孙颖奇,卢欣春
[南瑞集团(国网电力科学研究院)有限公司,江苏省南京市 210003]
0 引言
位移测量是目前最基本的监测量,已经渗入到各行各业。通过位移监测可以为工程安全预警、水库水坝液位预警、污水处理等提供可靠的依据,进而减少经济损失、人员伤亡和不必要的资源浪费。随着我国位移监测技术的发展,各行各业对位移传感器的测量要求越来越高,不仅要求其测量精度高、使用寿命长、稳定性好,而且要求其测量范围大,环境适应性强。目前,常用的位移传感器有电阻式、电容式、电感式、光栅式、超声波、雷达式等[1]。
本文设计的位移传感器是基于磁致伸缩效应的磁致伸缩位移传感器,可以实现非接触、绝对式测量,具有测量精度高、量程大等特点,由于磁铁和传感器可以实现无接触测量,因此传感器可应用于易燃、易爆、易挥发、有腐蚀等恶劣的环境下,此外,传感器能承受高温高压和高振荡的环境。因此,目前已被广泛应用于冶金、化工、环保、制药等民用领域以及舰船、飞机、导弹等军事领域[2-3]。
1 传感器的工作原理
磁致伸缩位移传感器是在法拉第电磁感应定律、铁磁体磁致伸缩效应、超声波传输原理等基础上,配合现代电子技术和半导体工艺研制的高精度位移测量装置,其工作原理如图1所示。当传感器工作时,脉冲发生器将一个问询脉冲加载到波导丝上,该脉冲会以电磁波速沿波导丝向前传播,由电磁场理论可得,在问询脉冲的影响下,波导丝周围会产生一个垂直于波导丝的环向磁场。当环向磁场与活动磁铁产生的轴向磁场相遇时,就会互相叠加产生螺旋形磁场,由磁致伸缩效应可得,该螺旋形磁场使波导丝在活动磁铁当前位置处产生瞬时扭转形变,形成扭转应变脉冲,应变脉冲是一种机械波,沿着波导丝向两端传播,当扭转波传播到波导丝末端时,被阻尼器吸收,防止波的反射干扰信号检测。当扭转波传播到波导丝顶端时,检测线圈能感应到由扭转波所引起的波导丝磁场强度的变化,于是在线圈两端就有感应电压输出。根据脉冲发射与电压信号输出的时间差计算活动磁铁的位置,从而得到待测物体的位移量。
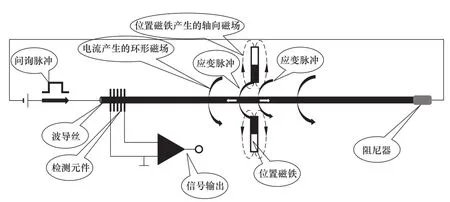
图1 传感器工作原理图Fig.1 Sensor working principle diagram
2 传感器结构设计
传感器结构如图2所示,主要包括密封堵头、挡圈、位置磁铁、波导丝保护管、测量电路密封壳体、密封电缆接头等,仪器内部设有波导丝、波导丝屏蔽层、消回波装置、波导丝直线度调节装置、测量线圈、测量电路板等。
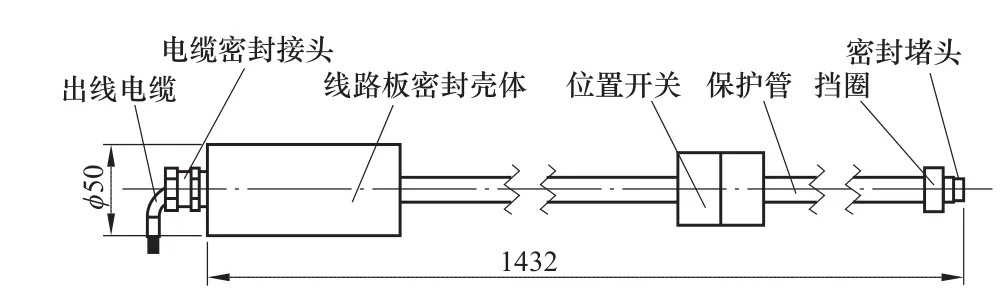
图2 传感器结构图Fig.2 Sensor structure diagram
根据传感器测量原理可知,应变脉冲是由问询脉冲产生的磁场与位置磁铁产生的磁场相互叠加致使波导丝发生变形而产生,然后通过检测此脉冲,从而得到位置磁铁的位置。目前市场上销售的该类传感器大多采用圆环或半圆环形状的永久性磁体作为位置磁铁,其磁场沿波导丝方向,再加上磁铁的厚度,相当于磁场有一定的长度。所以,当位置磁铁沿波导丝从左向右移动与从右向左移动,位置磁铁产生的磁场与问询脉冲产生的磁场叠加产生应变脉冲的位置出现偏差,从而导致传感器的回差增大。为了减小仪器的回差,将位置磁铁设计为沿圆周均匀分部的多个磁钢,且磁钢的磁场方向垂直与波导丝。
为了保证波导丝在其保护管中的直线度,提高传感器的测量精度,该传感器设置有波导丝拉紧装置,安装时通过调节该装置,可以保证波导丝的直线度,提高仪器的测量精度。
机械波在波导丝中的传播速度不仅与波导丝的密度、应力、材质等物理量有关,而且与环境温度也密切相关。为了减少温度对传感器测量精度及长期稳定性的影响,仪器设置有校准装置,通过测量位置磁铁与校准装置之间的距离差来测定位置磁铁的相对位移,可以提高仪器的性能。
另外,为了减少回波对测量的影响,在波导丝两端均设置有消回波的材料。
3 测量电路设计
磁致伸缩位移传感器测量电路硬件原理如图3所示。可以看出,测量电路主要由MCU模块、问询脉冲加载模块、回波信号检测模块、TDC模块等构成。MCU模块用于协调各芯片工作,产生相应的激励信号,将测量结果通过串口发送。问询脉冲加载模块包含了一个高阶的电荷泵储能电路以及一个放电控制场效应管。高阶电荷泵用于在充电电容Ccharge两端产生高达36V以上的激励电压,放电控制场效应管受MCU控制,导通后的瞬间将充电电容上储存的电量经由波导丝泄放,以产生所需要的高幅值问询电流脉冲。回波信号检测模块包含了一个电压放大倍数约几千倍的窄带放大电路以及由高速比较器和施密特触发器构成的比较整形电路。回波脉冲检测模块用于将同轴线圈接收到的回波信号提取出来,并整形成时间测量所需要的陡峭边沿信号。TDC模块主要包含了时间数字转换芯片GP22以及其外围电路。GP22拥有45ps的时间测量分辨率,可大幅度提高传感器的位移检测分辨率[4]。
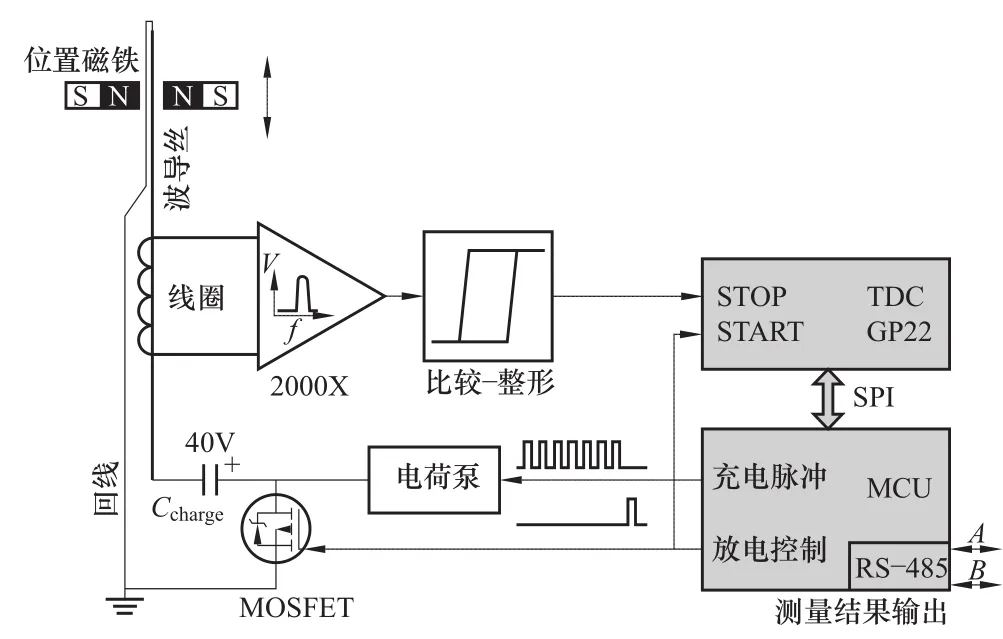
图3 磁致伸缩位移传感器测量电路原理图Fig.3 Schematic of magnetostrictive displacement sensor
4 软件设计
磁致伸缩位移传感器测量程序流程如图4所示。测量电路上电后,MCU首先通过SPI总线完成对TDC芯片GP22的初始化设置。完成初始化后,MCU通过数字I/O向电荷泵电路输出充电脉冲(Charge Pulse),在几万个充电周期后,充电电容Ccharge两端的电压约可达到36V以上。完成充电过程后,MCU给出脉宽的放电脉冲信号(Discharge Pulse),放电脉冲信号亦用作GP22时间测量的开始信号进入START端。放电控制场效应管在接收到放电脉冲信号后对地导通,将充电电容上储存的电量加载到波导丝上,产生瞬间问询电流脉冲。问询电流脉冲在波导丝上产生环向磁场,沿波导丝以电磁波波速向前传播,与位置磁铁的轴向磁场相互作用,在波导丝中产生应变脉冲,应变脉冲以机械波速在波导丝中传播,传播至同轴线圈处时产生感应电压。感应电压通过仪表放大器进行放大,再由双运放构成的带通滤波器进行放大,放大后的回波信号峰值为1.5~3V。放大后的回波信号再经过高速比较器与施密特触发器以整形成陡峭的脉冲信号作为时间测量终止信号。时间测量终止信号进入时间测量芯片进行测量。为了消除问询电流脉冲在线圈处产生的干扰,MCU设定延时后再接收回波脉冲信号。在获取时间测量结果后,MCU将时间测量结果乘以标定系数作为位移测量结果,通过串行通信接口,经由RS485芯片MAX3741向外发送。为了消除液面抖动对测值的影响,软件中加入了滤波算法。
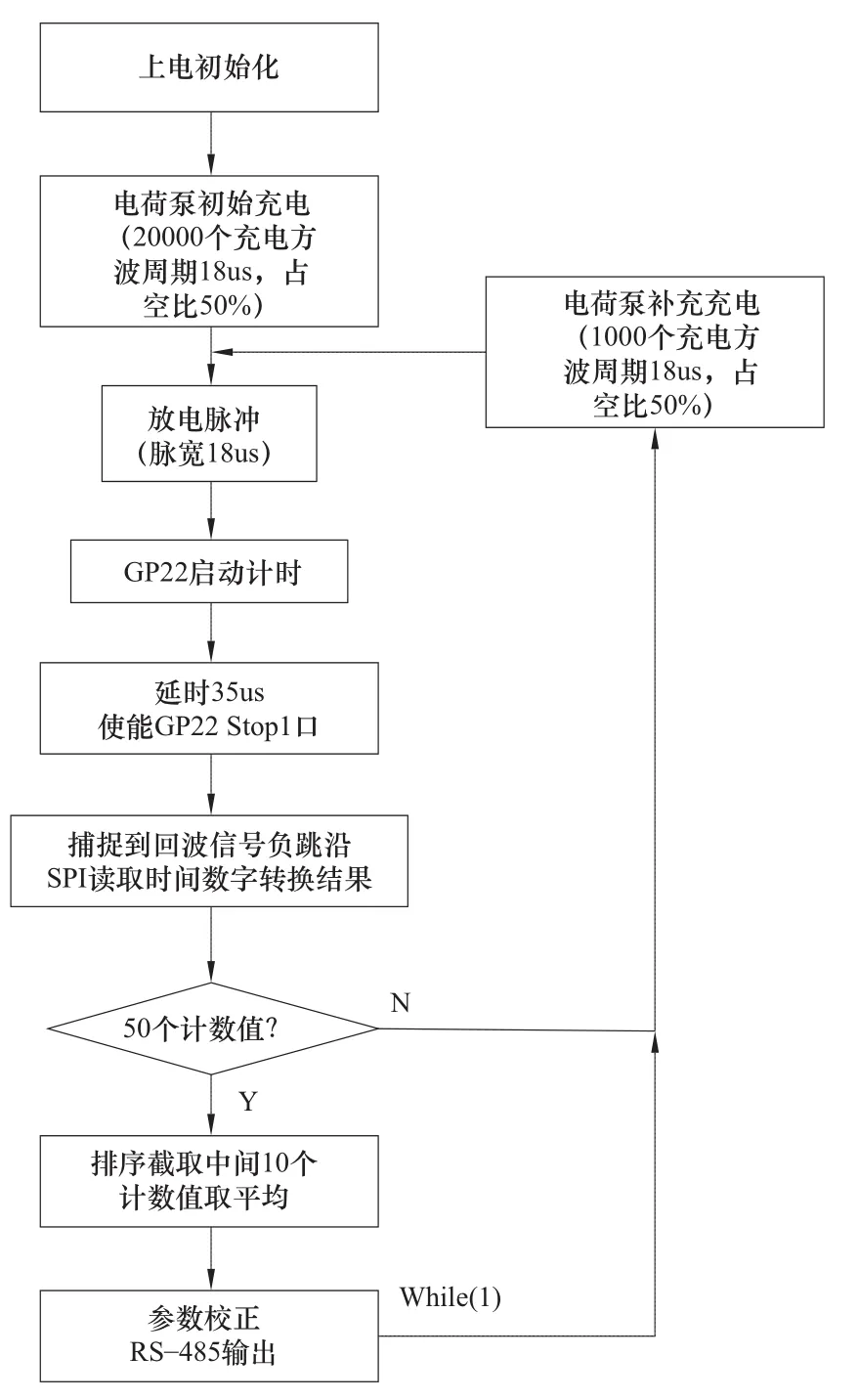
图4 测量程序流程图Fig.4 Flowchart of measurement program
5 技术指标
(1)测量范围:0~1000mm;
(2)示值误差:≤±0.1%FS;
(3)重复性:≤±0.02%FS;
(4)回差:≤ 0.02%FS;
(5)环境温度:-25℃~+55℃
6 试验
6.1 性能试验
对自行设计的两台仪器进行了性能测试,依次将仪器安装在标定架上,位置磁铁固定在移动平台上,通过移动移动平台使位置磁铁随之运动,每100mm一个挡位,每只仪器进行3个正返程测量,记录数据如表1~表4所示。
从表1、表2的数据可知:试验数据分别对示值误差、重复性误差和回差进行了考核,其性能指标如表5所示。

表1 1号仪器测试数据Tab.1 Test data of the fist instrument
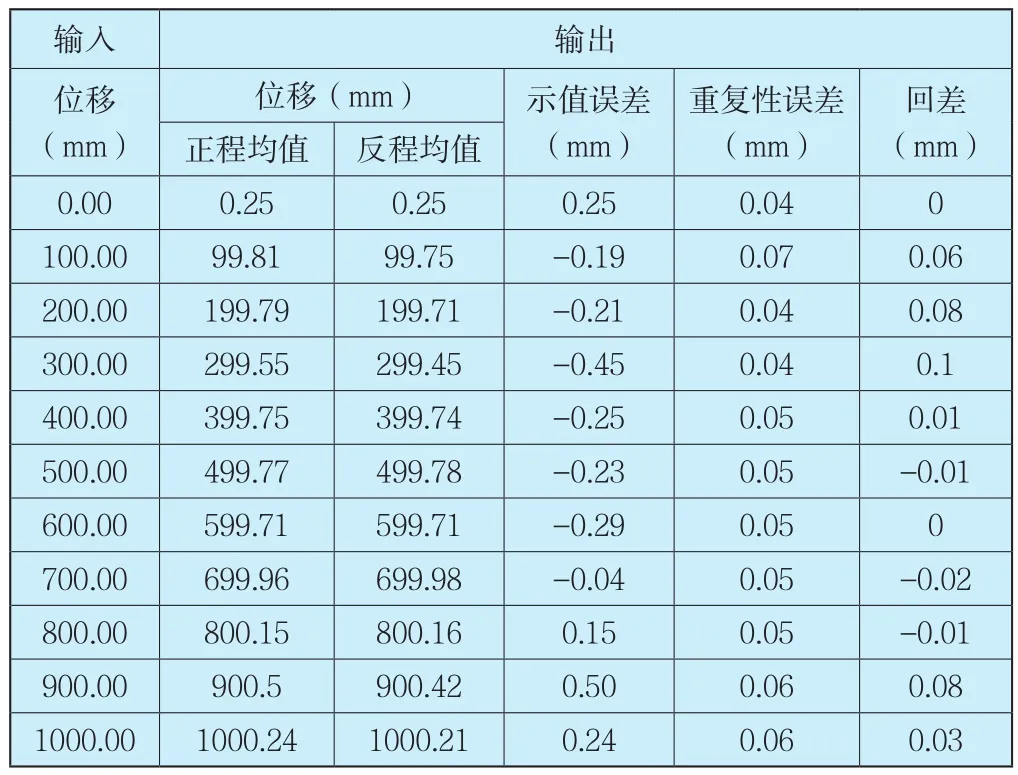
表2 1号仪器数据分析Tab.2 Data analysis of the fist instrument

表3 2号仪器测试数据Tab.3 Test data of the second instrument
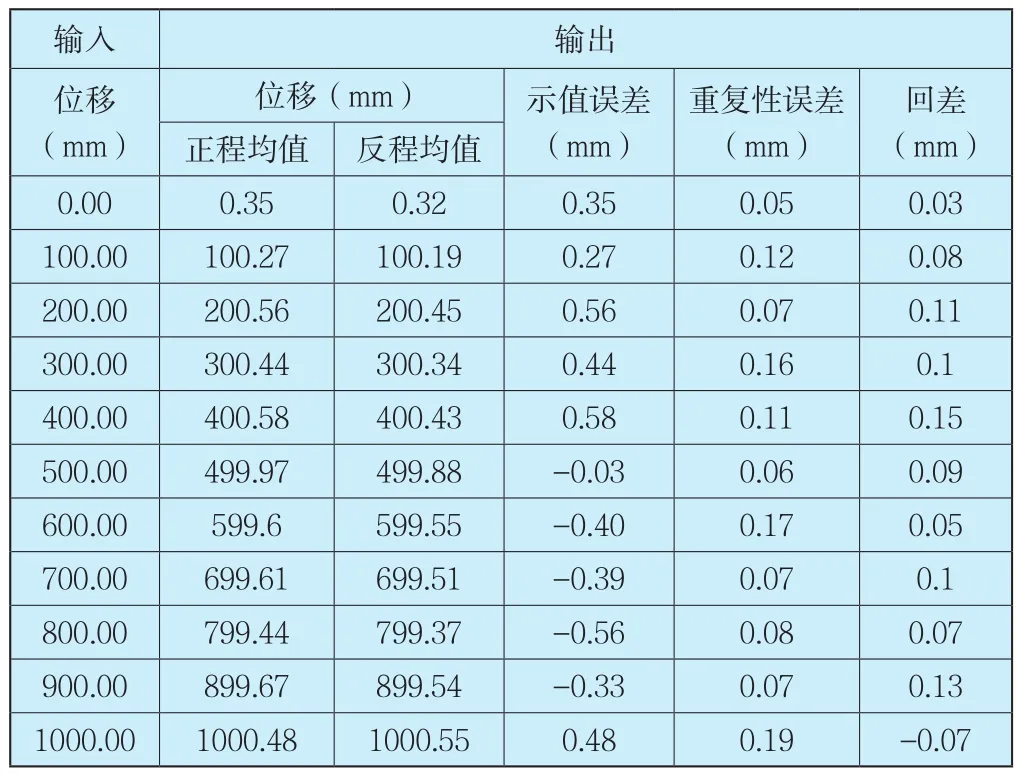
表4 2号仪器数据分析Tab.4 Data analysis of the second instrument
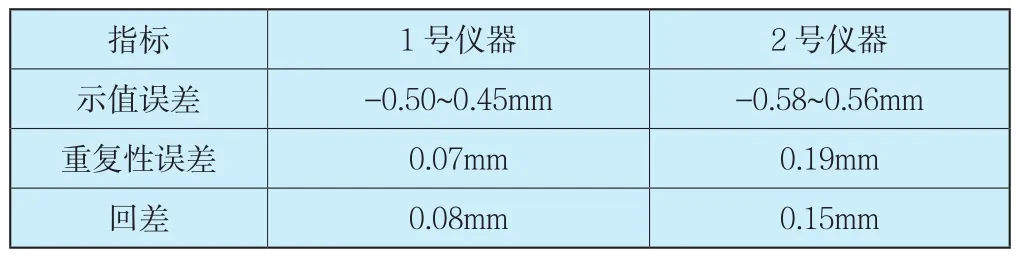
表5 1、2号仪器性能指标总结Tab.5 Summary of performance indicators for the two instrument
由试验数据可知,在测量范围内,仪器的示值误差、重复性误差、回差均在仪器设计要求范围之内。
6.2 稳定性试验
试验条件,在大气条件下,夜晚温度较低为5℃左右,白天房间开有空调,温度较高为25℃左右,温度变化范围为20℃左右。
将仪器与位置磁铁同时固定在一试验平台上,保证两者之间不出现相对移动,通过RS485通信线与电脑连接,接通电源,1号仪器拷机时间为2015/03/17~2015/3/26,历时9天,2号仪器拷机时间为2015/03/18~2015/3/26,历时8天,测量频率均为1h/次,试验数据如图5、图6所示。
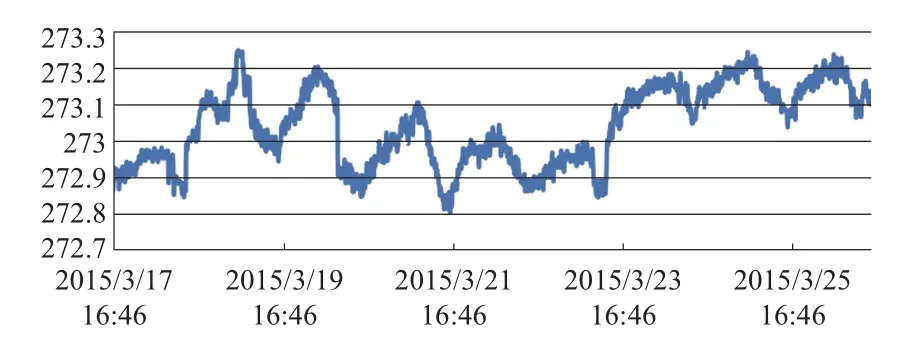
图5 1号样机稳定性试验数据曲线图Fig.5 Diagram of stability test data of the first instrument
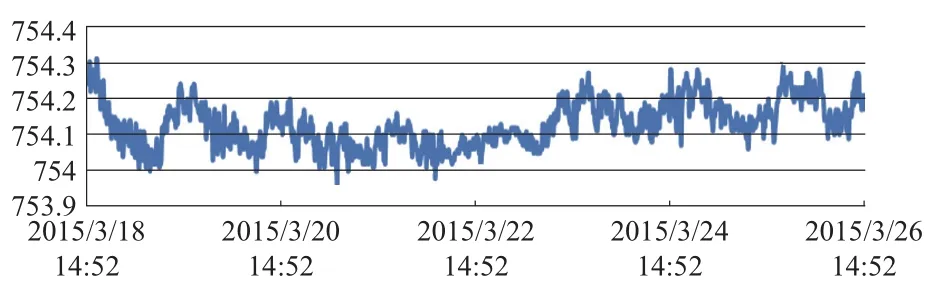
图6 2号样机稳定性试验数据曲线图Fig.6 Diagram of stability test data of the second instrument
从图5、图6的试验数据可知,通过对仪器进行长时间试验测试,即使在温度变化20℃左右的环境下,1号样机变化了0.45mm,2号样机变化了0.35mm,且两台样机均成周期性变化,由此可得仪器稳定性良好。
7 结束语
本文基于磁致伸缩原理设计实现了位移传感器,该位移传感器采用时间数字转换芯片进行回波信号的时间测量,显著提高了传感器测量分辨率。此外,传感器还通过特殊的结构设计,提高了测量性能。实验结果表明,本文设计的磁致伸缩位移传感器具有测量精度高、稳定性好、回差小等优点,可满足水利水电行业位移测量需求。
[1]吴蕊.磁致伸缩位移传感器[D].南京:南京理工大学,2011.
WU Rui. Magnetostrictive Displacement Sensor[D]. Nanjing University of Science and Technology,2011.
[2]李春楠,卢云,兰中文,杨邦朝.磁致伸缩位移传感器的研究进展[J].实验科学与技术,2008,1(6):10-12.
LI Chunnan,LU Yun,LAN Zhongwen,YANG Bangchao.Research progress of magnetostrictive displacement sensor[J].Experimental science and technology,2008,1(6):10-12.
[3]孙君文,李怀洲,潘日敏,杨永才.磁致伸缩位移传感器的研制[J]. 仪表技术与传感器,2006,6:1-5.
SUN Junwen,LI Haizhou,PAN Rimin,YANG Yongcai,.Development of magnetostrictive displacement sensor [J].Instrument technology and sensor,2006,6:1-5.
[4]徐国华,宋书锋,吕瑜.基于PIC单片机和TDC芯片的智能化磁致伸缩位移传感器[J].仪表技术与传感器,2004,5:34-36.
XU Guohua,SONG Shufeng,LV Yu. Intelligent magnetostrictive displacement sensor based on PIC MCU and TDC chip[J].Instrument technology and sensor,2004,5:34-36.
李学胜(1979—),男,工程师,主要研究方向:安全监测仪器的设计研发。E-mail:lixuesheng@sgepri.sgcc.com.cn
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
河北省科学院学报(2020年1期)2020-05-25 06:57:20
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
电子制作(2016年11期)2016-11-07 08:43:34
制导与引信(2016年3期)2016-03-20 16:02:00
Coco薇(2016年1期)2016-01-11 16:53:24
振动、测试与诊断(2014年5期)2014-03-01 01:14:34
少儿科学周刊·儿童版(2013年2期)2013-05-13 09:21:06
数理化学习·初中版(2011年3期)2011-04-14 07:23:00