
穴盘苗移栽机漏苗检测及补苗控制系统的设计
2018-03-06 05:48梅李爽常晨哲郑义洪蔡华强梁开放
新疆农机化 2018年6期
梅李爽,任 玲,常晨哲,郑义洪,蔡华强,梁开放
(石河子大学机械电气工程学院,新疆 石河子 832000)
0 引言
移栽作业是农业生产中的一个重要环节,研究移栽机漏苗及补苗系统可以制造出相应的移栽机,完善全自动移栽机性能[1],大范围使用移栽机可以解放生产力,提高工作效率和经济效益[2],对经济发展及机械化水平的提高有重大的意义。
欧美的一些发达国家依靠其本身的技术与资金方面的优势,已成功研制出多种类型的穴盘苗自动移栽机系统,并广泛用于生产实践,研制移栽机自动化程度较高,但其通用性比较差,整体结构,控制部分复杂,价格昂贵[3-4],对操作人员素质要求较高,难以适应我国目前的农业发展水平。国内的漏苗检测系统已较为成熟,但补苗系统仍有缺陷,目前已研制出基于机器视觉的穴盘苗定位检测系统,以及基于Delta并联机构用于快速移栽系统[5]。
1 整体系统设计方案
1.1 整体设计方案
本设计提出利用光电传感器检测移栽机接苗带上是否漏苗,由51单片机作为控制器控制步进电机进行补苗并由光电传感器检测是否补苗成功的控制系统。利用光电传感器检测接苗带上是否漏苗[6],如果没有苗,传感器开关发出信号给单片机,同时单片机上的蜂鸣器报警,单片机将漏苗信号传给LED灯显示并控制数码管显示漏苗数量加1,然后单片机驱动步进电机转动补苗带进行补苗并检测是否补苗成功,补苗检测成功传感器将信号传给单片机控制数码管显示缺苗数量减1,单片机控制数码管显示最终的缺苗数量。
1.2 工作流程图
该系统整体工作流程见图1。

图1 整体系统工作流程图
2 系统主要环节设计
2.1 检测环节设计说明
检测环节分为两步:(1)检测接苗带穴孔中是否有苗,如果没有苗将该缺苗信息由传感器传给单片机控制中心,由控制中心做出相应处理;(2)第二次检测是在步进电机补苗之后,在补苗处进行是否补苗成功的检测,补苗成功或失败会将相应的信号传给单片机控制中心的数码管,点亮数码管以此作为显示装置。
2.1.1 检测传感器安装位置及选型
为使检测环节实现精准检测避免无关干扰,本设计安装光电传感器检测幼苗茎部,选择型号为E18-D80NK型的光电传感器,根据不同幼苗以及苗间距调节光电传感器的灵敏度和检测距离实现对接苗带上漏苗数量的精准检测。
本文以辣椒幼苗做为检测对象进行相关模拟实验[7],根据对辣椒幼苗生长状态的实验观察以及查找相关资料得到辣椒幼苗最宜移栽时间为幼苗露地50~70天。此时幼苗较壮,苗高15~20cm,茎粗3.7~3.9mm,有6~10片叶,单叶面积平均700 mm2,已经现蕾开花,根系发达。
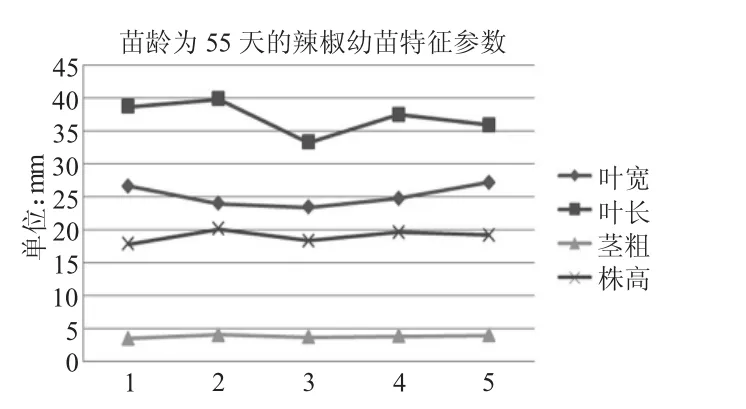
图2 辣椒幼苗生长形态参数
由以上数据可得出幼苗生长过程中幼苗的茎部变化不明显,以茎部作为检测部位检测结果数据最为可靠[8-9]。
2.2 控制环节设计
2.2.1 系统组成及硬件选型
根据所设计的系统,由两个传感器进行漏苗检测和补苗检测,当一个传感器在接苗带检测到漏苗后单片机控制步进电机动作并控制单片机自带的数码管加1同时控制蜂鸣器发声;当另一个传感器在补苗带检测到苗落下后单片机控制步进电机停止动作并控制单片机自带的数码管减1,当数码管显示数值为零即所有漏苗处全部补上苗时控制蜂鸣器不再发声。硬件部分主要由单片机,传感器,数码管,蜂鸣器和步进电机组成。单片机型号采用STC90C516RD+系列单片机。
2.2.2 精准补苗控制
为保证补苗过程的精准性,需要依靠公式及数据和一系列仿真的支撑。由实验需要结合实际得出如下公式:
(1)输苗带部分
步进电机的齿轮数为Z,步进电机通电一个循环,转子转动一个齿距,相当于空间上转过360/Z,即每运行一拍,转子转过的角度只是齿距的1/N,N为拍数,因此歩距角A为:

式中 N=Cm,C—通电状态系数,当采用单拍或双拍时,C=1,而采用单、双拍时,C=2,m 为相数。
给步进电机通电来控制输苗带和补苗带运动时,可认为是速度控制,给步进电机送入的是连续脉冲,各项绕组轮流通电,步进电机连续运转,它的转速与脉冲频率成正比。由公式(1)可知,每输入一个脉冲,转子转过的角度是整个圆周的N/Z,也就是转过N/Z转,因此每分钟转子所转过的圆周数即转速为:

式中 n—转速,r/min;f为控制脉冲频率,即每秒钟输入脉冲数。
输苗带上的传送速度v为:

式中 v—输苗带运动速度,m/s;R为步进电机转子部分的半径,m。
(2)补苗带部分
建立在理想及实际无法得知准确数据的情况下,计算时忽略各类运动阻力,如空气阻力;选取理想的情况进行计算。
补苗带是建立在输苗带上方H高度的地方,当补苗时,苗在空中需要一段时间的运动才能落进输苗带上的苗坑里。

式中 t—苗下落时间,s;H—补苗带与输送带之间的高度差,m;g为重力加速度,m/s2。
为保证补苗精确性,因为在补苗下落的过程会有一个水平方向上的位移,而又因为补苗带和输苗带是同样的电机,在理想情况下,补苗水平速度是v,即在补苗下落时间t时间内,补苗的水平位移为加上漏苗坑的位移X,公式表达如下:

式中 X—漏苗检测传感器与补苗带出苗处之间的水平距离,m。
为保证实验中补苗的精准性,根据公式(5)来设置距离X,由公式(5)亦可看出,在步进电机确定的情况下,X是根据补苗带与输苗带之间的高度差H的变化而变化的。
3 软件部分
3.1 使用的软件
使用proteus(整体设计的仿真)和MATLAB(抛物线的图)两种软件来进行仿真。通过MATLAB对补苗过程中忽略空气阻力和一定摩擦的理想情况下苗的轨迹进行研究,从而得到较为精准的苗的轨迹图和苗的下落点及下落时间。通过使用proteus软件,对整体设计进行合理的仿真,并可以通过proteus的仿真检查出一些不必要的错误,从而进行改正,避免了不必要的麻烦,提高了项目的准确性,可靠性和实际性。
3.2 控制流程图
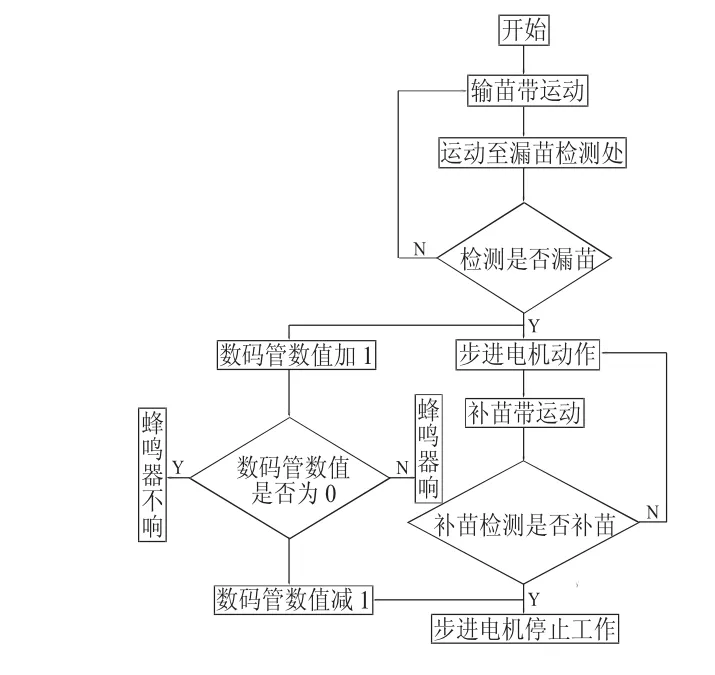
图3 控制流程图
3.3 MATLAB仿真
补苗过程中苗的轨迹如图4,在忽略阻力的理想情况下为一个平抛运动。0点为苗刚飞出补苗带的位置,高度为补苗带与输苗带间的距离H。
3.4 Proteus仿真
Proteus仿真图如图5。系统开始工作时,光敏传感器开始进行漏苗检测,当有漏苗信号传递给单片机时,图5中的控制台开始给单片机信号,从而控制步进电机工作并控制数码管显示屏显示数值加1,步进电机控制补苗带进行运动,进行补苗,同时进行补苗检测,检测到需要进行补苗时,将有补苗信号控制电机工作,数码管显示屏数值减1。
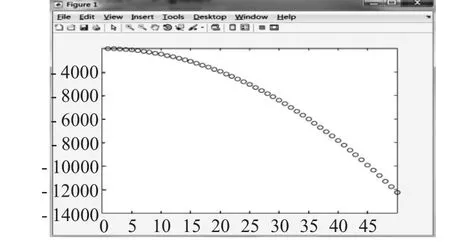
图4 抛物线图
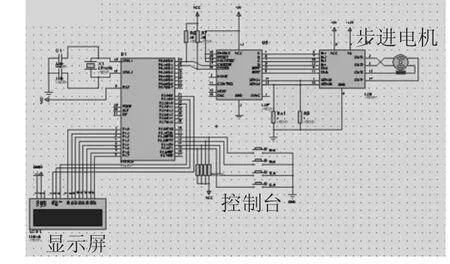
图5 proteus仿真
4 单片机试验验证结果
试验开始时漏苗检测的传感器处于被遮挡的状态,传感器的镜头对准移栽幼苗的茎部。实验开始后,随着接苗带的运动,传感器由被遮挡的状态变为不被遮挡的状态并保持一定的时间,这段时间为苗与苗的间隔,同时也是程序中的延时时间。当这段时间过去后,如果缺苗,那么程序就会接收到缺苗的信号,单片机就会控制数码管数值加1并控制蜂鸣器发声,同时控制步进电机动作一下,实现漏苗检测以及补苗控制。对于补苗检测试验,试验开始时补苗检测的传感器处于不被遮挡的状态,传感器的镜头位于移栽幼苗在补苗带上的位置的前方,同时补苗带的前方有一个圆筒将补苗带包起来,只要有苗通过,则苗必然通过圆筒到达指定的补苗点。试验开始后,随着补苗带的运动,传感器由不被遮挡的状态快速变为被遮挡的状态并保持一定的时间,这段时间为通过苗的高度所用时间,因为苗是躺在补苗带上的,因此时间较长。传感器的镜头再次由被遮挡的状态变为不被遮挡的状态并保持一定的时间,这段时间为苗与苗的间隔的一半,同时也是程序中的延时时间,当这段时间过去后,如果有这两个过程,那么程序就会接受到补苗的信号,同时单片机就会控制数码管数值减1并控制步进电机停止动作。
5 结语
本设计研究的移栽机漏苗检测及补苗控制系统可以制造出相应的移栽机,完善全自动移栽机的性能,大范围使用移栽机可以解放劳动力,提高工作效率和经济效益[10],也可为以后全自动移栽机的发展与完善提供参考。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
四川党的建设(2022年13期)2022-07-07
农业工程技术·温室园艺(2021年3期)2021-07-08
农业工程技术(2021年7期)2021-05-31
农业工程学报(2021年3期)2021-04-15
科教导刊·电子版(2021年36期)2021-01-02
电脑报(2020年12期)2020-06-30
电脑报(2019年2期)2019-09-10
科技风(2019年13期)2019-06-11
时代农机(2019年2期)2019-04-24
