
基于AgisoftPhotoScan的图像与三维激光扫描三维重建精度对比
2018-03-06 02:03:12吴超清张振华陶小明
建材与装饰 2018年6期
吴超清 张振华 陶小明
(江西理工大学建筑与测绘工程学院 江西赣州 341000)
1 基于图像的三维重建软件
影像数据的获取相对于三维激光扫描来说更加简单、拍摄手法也更加灵活,可以使用航拍亦或是无人机或者手持高分辨率数码相机并且成本也更低[1]。AgisoftPhotoScan是一款基于影像自动生成高质量三维模型的优秀软件。它无需设置初始值,无需相机检校,根据最新的多视图三维重建技术,可对任意照片进行处理,无需控制点,通过控制点则可以生成真实坐标的三维模型。照片的拍摄是任意的,无论是航摄照片还是高分辨率数码相机拍摄的影像都可以使用。整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化[2]。
2 基于图像的三维重建方法
选取一组名为“叶枝思根”的石质浮雕,使用数码相机环绕浮雕一周共拍摄126张高清照片。将所有照片载入软件中,通过“对齐照片”,将相邻照片重复率小于50%的伪片自动删除,此类照片由于缺少同名点参照,无法恢复出相机、照片和实物的相对位置,对齐照片中的同名点以像素形式显示真实位置,之后获取浮雕的稀疏点云模型,通过内插法建立密集点云,选择级别高后共生成1300万个空间像素点,生成网格并进行纹理映射[3],结果如图1所示。
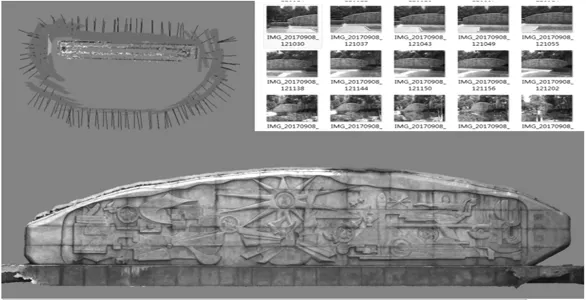
图1 密集点云模型
3 精度对比
数据采集时在浮雕的正面上布设10个靶标,其中4个是三维激光扫描系统的圆形靶标,6个是AgisoftPhotoScan提供的图形靶标。由于三维激光扫描获取到的三位激光点云具有较高的精度和可信度,因此将三维点云作为参考坐标。选取三维激光扫描系统的4个圆形靶标的点位数据作为控制点,在AgisoftPhotoScan软件中将多视图影像生成的点云数据的坐标系转换至三维激光扫描仪器坐标系下。将剩下的6个图形靶标的点位数据用作检核点与三维激光扫描仪实测坐标作比较。模型坐标与三维激光扫描坐标对比结果如表1所示。
4 结束语
虽然基于图像的三维重建精度还达不到很高的水平,但是其图像获取手段方便多样,测量时间相较于三维激光扫描大大缩短,建模过程高度自动化。非常适合于大型复杂场景尤其是异性物体的建模。
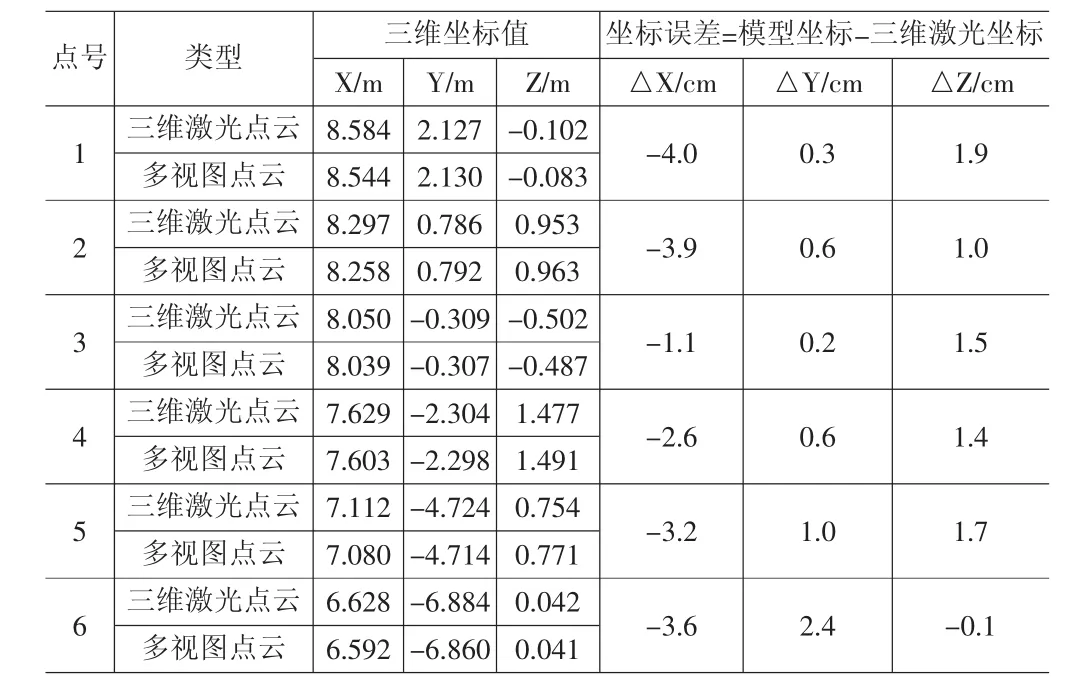
表1 检核点三维坐标值
[1]唐雪海,王田磊,袁进军,等.数字近景摄影测量辅助三维激光扫描用于森林固定样地测树原理探讨[J].安徽农业科学,2010(12):6095~6097.
[2]Perry,ToddSheridan.Agisoft’sPhotoScan[J].Animation,2013,27(2):38.
[3]缪盾,吴竞.基于AgisoftPhotoScan的图像三维重建及精度研究[J].测绘工程,2017,26(8):41~44.
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
智慧少年·故事叮当(2020年9期)2020-10-09 10:21:44
软件(2020年3期)2020-04-20 00:56:34
世界农药(2019年3期)2019-09-10 07:04:10
儿童故事画报·智力大王(2017年3期)2017-06-30 22:45:00
光学精密工程(2016年6期)2016-11-07 09:07:56
光学精密工程(2016年4期)2016-11-07 09:04:48
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
肿瘤影像学(2015年3期)2015-12-09 02:38:45
幼儿智力世界(2015年5期)2015-08-20 09:32:29
