
驴头焊接变位机设计研究与仿真
2018-03-05 11:42:42李相国李明浩姜学田姜源孙庆
机械工程师 2018年2期
李相国,李明浩,姜学田,姜源,孙庆
(大庆油田装备制造集团抽油机制造分公司,黑龙江大庆 163255)
0 引言
驴头作为游梁式抽油机四大结构件之一,外形不规则,焊道分布复杂;焊接过程需对其进行多次翻转,在翻转过程中存在安全隐患[1]。目前,现有的驴头焊接变位机,更多是与焊接机器人配套,一次定位不能完成所有焊道的焊接。如图1所示,一次定位无法焊接定位侧驴头侧板上定位轴、调整螺母及定位管等焊道。

图1 一种驴头焊接变位机
根据我集团生产现状及驴头结构特点,需要研发出一种适用于手工焊接,且能实现驴头全部焊道焊接的焊接变位机。焊接变位机可将工件任意一条焊缝转到平焊或者船焊位置[2],可提高焊接效率、产品焊道质量,而且可以改善操作者工作环境,降低劳动强度,消除翻转驴头时存在的安全隐患[3]。
1 焊接回转平台结构设计
目前,焊接变位机主要分为三种结构类型:伸臂式、倾翻回转式和双立柱单回转式。笔者所设计的焊接变位机属双立柱单回转式,根据驴头的结构及焊道分布特点,综合考虑焊接变位机的通用性、定位方式,焊接回转平台采用“鱼骨”式结构[4]。通过设计配重块使焊接回转平台的重心在两旋转轴轴线处,提高结构稳定性的同时,可有效降低驱动力矩。
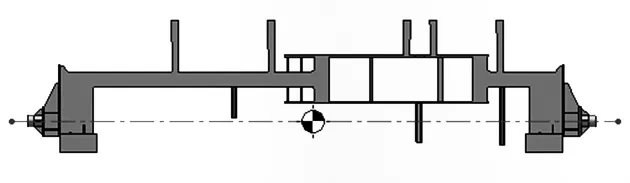
图2 焊接回转平台结构图
该焊接回转平台所用材质为Q345,应用SolidWorks软件对其结构进行了有限元分析。分析之前首先要对焊接回转平台进行网格划分,SolidWorks Simulation网格处理功能可对复杂的结构模型进行高品质的网格处理,计算结构能反映出实际受力情况[5]。为了验证自身结构安全性,在重力的作用下对其进行了受力分析,分析得最大应力及最小安全系数4.35位于旋转轴加强筋板连根部,最大位移为1.9 mm在允许变形范围内,不影响其结构稳定性。
将14型抽油机驴头固定在焊接回转平台上,同时在驴头上方施加0.25倍驴头重量的均布载荷,分析情况如图4所示,最大位移为1.37 mm,最大安全系数为3.35,焊接回转平台满足工作要求。焊接回转平台除了满足结构稳定性外,还要设置焊接导电装置,防止焊接电流对齿轮副和轴承等回转副造成损伤[6]。

图3 焊接回转平台有限元分析云图

图4 施加载荷后综合分析云图
2 驴头定位方式
设计驴头在回转平台的定位装置时,充分考虑定位快捷与稳定性,采用四点定位方式,对其进行定位。根据驴头侧板的外形尺寸,设计专用夹具限定驴头空间6个方向自由度。定位装置由一组圆弧定位装置和一组滑块式定位装置组成;通过定位装置上压紧机构,限定Z轴方向移动和绕X轴、Y轴旋转,3个方向自由度;滑块定位装置可沿Y轴移动,与侧板边缘接触部位呈斜面状,倾斜角度与侧板相同;圆弧定位装置相对固定,滑块定位装置向圆弧定位装置移动至与驴头侧板斜面完全接触,可限定驴头沿Y轴方向移动和绕Z轴旋转;而滑块定位装置内部斜面可限定驴头沿X轴方向的移动,如图5所示。

图5 驴头四点定位
3 焊接变位机动力学分析
考虑焊接时焊缝位置不宜过高,不便于操作者施焊,回转台不能整周旋转,旋转角度为0°~180°,再由180°至0°。运动仿真分析时,忽略调心滚子轴承产生的摩擦力矩。运动学分析目的在于准确选择驱动力矩及电动机功率,为此简化支撑立柱,建立动力学模型。为模型添加驱动马达,马达类型旋转距离,角度旋转180°,时间设定为12 s,为了实现焊接回转平台0°~180°~0°,需要为模型添加2个旋转马达,马达1为0°~180°提供动力,马达2为180°~0°提供动力。通过设置马达键码来实现其运动过程,为模型添加引力,在算例类型中选择Motion,开始进行动力学分析[7]。分析得马达1和马达2的力矩及能源消耗如图6~图8所示。马达1和马达2最大力矩为6479 N·m,消耗能源为3393 W。将驴头固定在焊接回转平台上,在0°和180°时,整个回转平台需要制动力矩才能保持在工作位置,为了确保安全性,需增设机械锁紧装置。

图6 马达1力矩

图7 马达2力矩
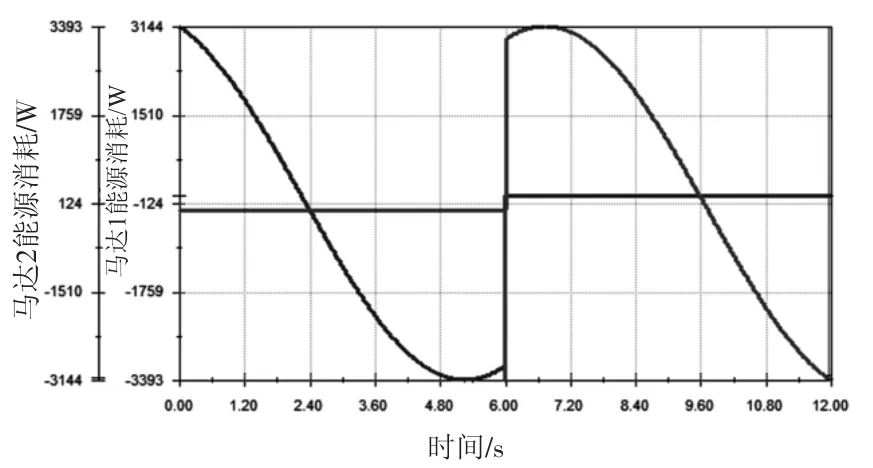
图8 马达1和马达2能源消耗
4 结语
综上所述,通过分析驴头的结构及焊缝分布,以SolidWorks软件的有限元及运动学仿真分析分析结果为参考,可有效优化其结构,准确选择其驱动力矩和传动系统。
通用驴头焊接变位机,可以很好改善焊接操作者作业环境,有效提高工作效率及产品焊接质量,消除驴头翻转过程中潜在的安全隐患。
[1] 李相国.基于有限元理论优化设计梁式抽油机结构件[J].机械工程师,2015(9):201-203.
[2] 翟浩,孟国强,王彩凤.常用焊接变位机种类及其选用原则[J].工程机械与维修,2013(11):179.
[3] 林尚扬,陈善本,李成桐.焊接机器人及其应用[M].北京:机械工业出版社,2000.
[4] 李相国,李明浩.通用驴头焊接变位机:CN201520736974.6[P].2015-09-22.
[5] 陆宗学,崔世义,刘勇.基于SolidWorks Simulation的重载机械手主梁的有限元分析[J].机械工程师,2013(11):129.
[6] 谭湘夫.焊接变位机[J].机械工程师,2001(3):58-59.
[7] DS SolidWorks公司.SolidWorks Motion运动仿真教程[M].北京:机械工业出版社,2012.
猜你喜欢
中国科技博览(2017年19期)2017-07-19 22:04:12
小学生导刊(2017年15期)2017-05-17 05:44:09
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00
云南畜牧兽医(2015年4期)2015-02-28 21:26:12
建筑机械化(2015年7期)2015-01-03 08:09:02
当代畜禽养殖业(2014年5期)2014-08-31 02:50:56
当代畜禽养殖业(2014年2期)2014-08-22 02:38:52
法人(2014年2期)2014-02-27 10:41:33
大灰狼(2009年7期)2009-08-26 05:59:32
