
基于三维视觉的高速公路视频检测技术
2018-03-03 13:12孙周曹爱辉
数字技术与应用 2018年11期
关键词:高速公路
孙周 曹爱辉

摘要:针对高速公路基本不能主动发现交通异常的现象,开创性的提出构建基于三维立体视觉的高速公路交通异常智能识别系统。开发的系统在巡视过程中能自动侦测、识别交通异常事件,并及时予以预警。
关键词:双目视觉;三维视觉;高速公路;交通异常
中图分类号:TP29 文献标识码:A 文章编号:1007-9416(2018)11-0074-03
0 引言
高速公路的交通异常(违章停车、交通拥堵、交通事故、车辆抛锚及各类抛洒物等)时常会引发重特大交通事故,事故发生的概率、数量和交通异常生成至被消除的时间长短直接关联,基本呈现时间越长概率越高,数量越大的规律,尽快发现交通异常成为迅速消除交通异常的重要前提。实时检测路面突发的交通异常是确保道路安全畅通的有效手段[1]。
利用三维视觉原理进行高速公路交通异常智能检测,是对交通异常发生现场进行三维空间场景构建,从而实现对造成交通异常的因素进行检测和分析。本文针对基于三维立体视觉的高速公路交通异常智能识别方法展开深入研究,解决目前交通事件检测中存在的问题,提高交通异常检测的精度,降低实际检测中的误报率,通过研究交通异常现场的三维空间形态,可以更加直观准确地进行交通异常检测。
1 三维立体视觉智能识别技术方案
三维立体视觉就是用各种摄影摄像系统代替视觉器官获取立体图像,由计算机来代替大脑完成处理和解释,又称为计算机视觉。计算机视觉的研究目标就是使计算机能够模拟人脑通过视觉观察和理解世界,具有自主适应环境的能力[2]。给定一个场景的两幅及两幅以上图像录像,根据场景重建为该场景建立一个计算机模型(三维模型)[3]。简单的讲,就是生成一组三维空间点,更复杂的情况会建立起完整的三维表面模型。
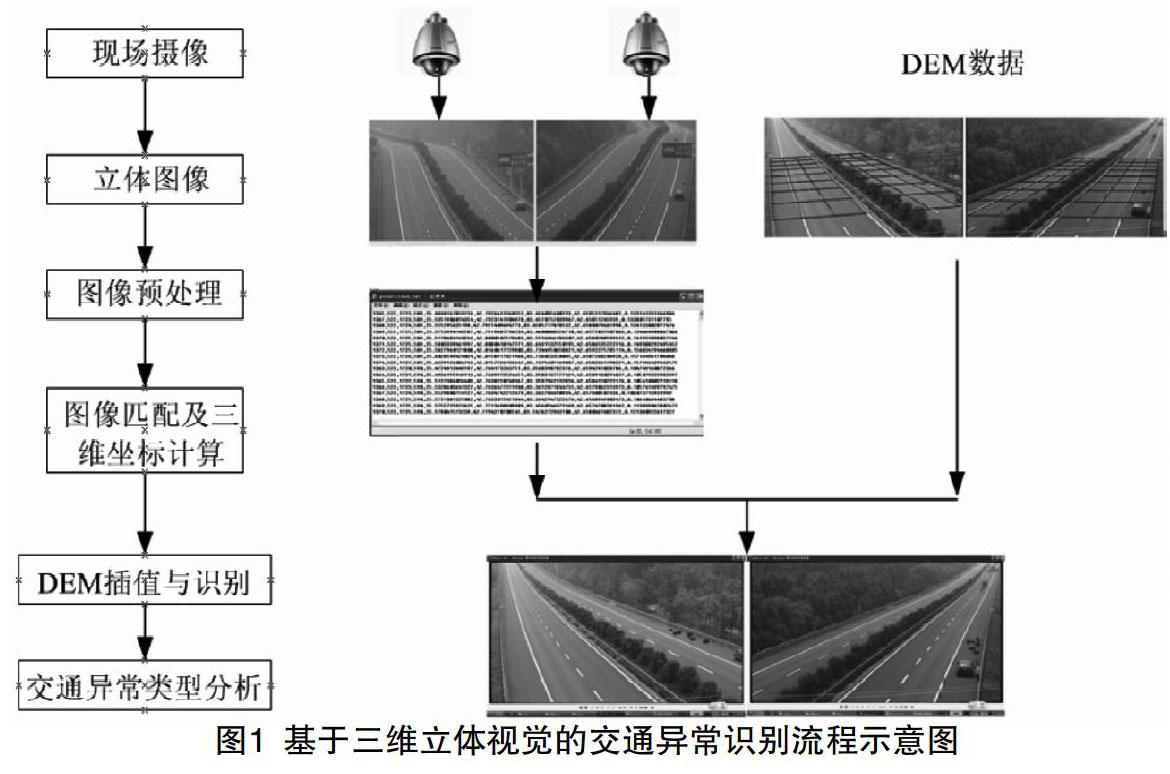
利用三维立体视觉进行高速公路交通异常识别的优势在于将高速公路运营过程的视频图像进行实施采集与传输,开发专门的软件计算检测图像内目标的三维空间坐标,并将三维坐标与路面三维数字高程模型相比较,与路面高程一致的静止目标可能是阴影、光影、纸片等非障碍目标,高出路面高程的就初步判定为交通异常,然后根据目标高出路面高程的程度进一步判断其交通异常类型。
基于三维立体视觉智能识别主要包括以下主要工作:
(1)建立原始路面三维数字地面模型;(2)摄像机位置设计与摄像机布设;(3)同步监控图像获取与传输;(4)图像预处理;(5)图像匹配与监测点计算;(6)异常点提取与识别;
其主要技术方案如图1所示。
2 基于三维立体视觉的高速公路交通异常智能识别系统构成
本系统由至少两台具备PTZ功能的摄像机、双目智能事件监测器、双目智能事件监测服务器、 视频事件监测终端软件及相应的通讯、供电等部分组成,如图2所示。
利用两台具备PTZ功能的摄像机进行视频采集和图像获取;利用IP网络连接视频矩阵,通过矩阵对摄像机云台进行控制,完成分时检测功能;事件检测主机进行云台控制,视频采集,图像获取和分析,当发现交通事件时通过语音进行报警,并录制分析的视频。具体地,外场摄像机拍摄道路交通情况,将采集的视频信息通过光纤发送给视频监控平台,通过视频矩阵传输给光端机利用服务器对信息进行处理,输出视频便于掌握交通信息并进行调控。
3 试验环境建设
本系统构建方案由以下几个方面组成,第一步,安装外场摄像机,现场设置标志点并测量现场标志;第二步,利用光端机等设备将外场视频传输至监控中心,并从视频矩阵或视频分配器中将视频采集到交通事件检测服务器上;第三步,构建检查区域的DEM;第四步,编写和安装软件系统,进行检测区域检测,并在检测区域内检测停车、抛洒物等交通异常事件。
因高速公路交通异常是与空间位置相关的事件,通过地面空间形态——路面三维模型的动态变化识别交通异常事件的发生。高清相机在空中不可能拍摄范围很大,通过改变相机的姿态角度及焦距拍摄不同的路段,根据数字摄影测量的原理需要确定相机在拍摄瞬间的空中姿态,此外需对相机要进行校正,这些都需要一个基准——空间三维坐标系。
路面三维模型即路面三维立体是本项目的工作基础,建立路面三维模型是本项目实施过程中的一项重要工作。路面三维模型是在特定三维空间(参考)坐标系下描述路面的空间状态或确定路面上任意点在设定坐标系下的三维坐标。
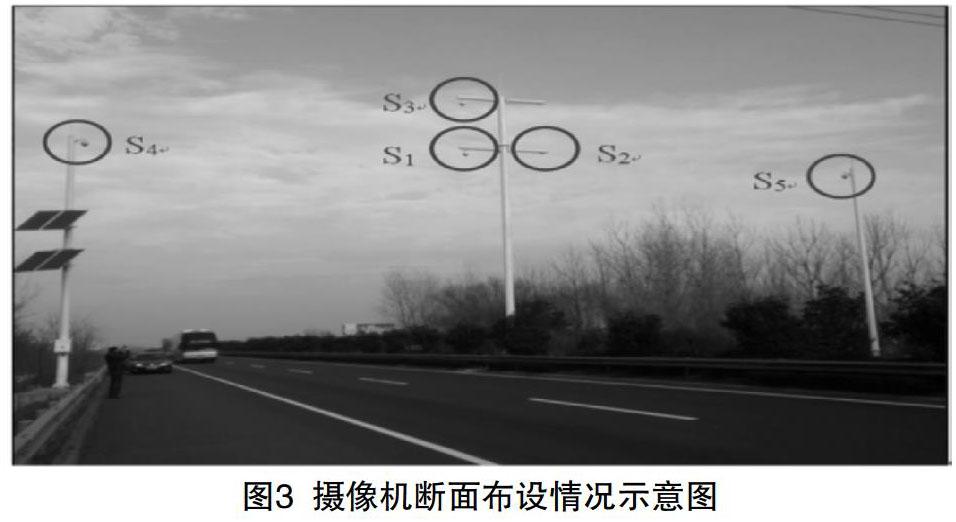
实验区选择在宁杭高速公路溧水东收费站与东庐山服务区之间,处于从平原路段到丘陵地区的过渡区间,地形分布复杂,行驶环境困难,在现有的摄像监控基础上进行改造,增设部分摄像设备以及路面标志,达到交通异常智能检测的科研条件。
如图3所示,S4为原先设置在南京往杭州方向右侧的摄像头,根据科研研究内容的需要,与2013年增加了左側的S5摄像头,2014年又增加了位于中央分隔带的S1、S2和S3的摄像头,构成了多机位、多组合的五摄像头实验环境。S4和S5,组成“长基线摄像机对”;中分带布设四个摄像头,组成“短基线摄像机对”。
4 试验系统分析
监控区间分布在摄像机断面的两侧,从摄像机位置起,分别向杭州方向和南京方向各布设了3个检测区间。如图4所示,往杭州方向由近至远分别是区间1、区间2和区间3,往南京方向由近至远分别是区间4、区间5和区间6。
实验将5个摄像头进行不同组合分3个组合检测模式,其组合方式和监控区间如表1所示。
通过布设在路边和路中的测量标志,可以计算各张视频图像的内外参数,监控模式1各视频图像的内外参数如表2所示。
监控模式2、3各视频图像的内外参数(略)。
构建的试验系统对实验区域进行了长期的实验检测,实验系统中将5个摄像头进行不同组合构成了3个检测模式,在不同的气候条件、不同的时间段进行了测试,以验证系统可靠性。
4.1 交通異常智能检测误报率统计
首先对系统的检测误报率进行了统计,其结果见如表3所示。
产生误报的因素分析:①天气因素:阴雨天气造成地面成像不稳定,使得系统自动识别产生误匹配;②光照条件:由于路段为南北走向,早上和傍晚的光照方向使得路面白色行车线在图像上的成像差异造成误报;③硬件系统故障:预置位改变、摄像机断电等等。
4.2 交通异常智能检测漏报率统计
通过在路面上设置障碍物、车辆逆行和行人走动,对系统的检测漏报率进行了统计,其结果如表4所示。
产生误报的因素分析:①天气因素:雾霾、阴雨天气造成检测目标成像模糊,识别困难;②DEM因素;③标志牌遮挡;④硬件系统故障:预置位改变、摄像机断电等等。
(1)模式1由于基线较长,理论精度相对模式2、模式3较高,能够对高精度的物体进行检测。试验中,以0.0米的精度要求检测时,试验放置的障碍物都能被检测出来,但由于测量精度的限制,与路面同高度的地面点也出现了误报;以0.1米的精度要求检测时,大于0.1mm的障碍物能被检测出来,由于测量精度的限制,与路面同高度的地面点也出现了误报;以0.2米的精度要求检测时,较大障碍物能被检测出来,但低于0.2m的障碍物也会出现漏报。(2)模式2、模式3由于基线较短,理论精度较模式1低,试验中对移动车辆进行实验。实验中通行车辆能够实现准确的检测,可以用来检测违停或通行车辆。
5 结语
两台高清摄像头组成的实验系统已具备智能化的工作模式,可通过预先植入的巡航预案,控制摄像头同时自动巡摇,对路段实施高速公路道路交通异常的自动识别,检测范围可有效覆盖1.6公里的范围;自动发现交通异常时间可小于5分钟;正常光照情况下检测范围内最远端可检测的最小异物物理尺寸在18cm左右,能有效、及时地检测、识别多种道路抛洒物(交通异物);系统也可识别违停、逆行、行人闯入等;可有效地工作在各种白天日光光照环境下,识别结果不受光影变化、风抖和车辆振动等自然环境因素的影响;可准确区分阴影、光斑、车辆、水痕、行人及抛洒物等三维立体视觉元素。系统将能在白天的不同时段、晴阴转换、阴雨天气等各种环境下实现高于85%的交通异常预警判断准确率。
本文构建了一种全新技术方法,可克服传统视频交通事件检测技术固有缺点,利用带云台的摄像机实现自动巡视,并在巡视过程中自动侦测、识别交通异常事件(包括违章停车、非法载客、交通事故、车辆故障停车、道路抛洒物等),及时予以预警,变被动式监控为主动式监控,达到进一步提升全程监控覆盖效率目的。
参考文献
[1]蒋新春,刘小明.基于视频检测的高速公路车辆交通行为安全状态分析[J].公路交通科技,2010,(27):122-125.
[2]赵亮亮.双目立体视觉中的图像匹配技术研究[D].南京:南京航空航天大学信息科学与技术学院,2007.
[3]燕磊.双目视觉三维重建技术研究[D].天津:天津理工大学,2017.
A Highway Traffic Anomaly Intelligent Recognition System Based on the Three-dimensional Vision
SUN Zhou1,CAO Ai-hui2
(1. JSTI Group,Nanjing Jiangsu 211112; 2.Jiangsu puce testing certification co. Ltd., Nanjing Jiangsu 210019)
Abstract:This project was aimed to solve problems that the highway monitor can not take the initiative to find abnormal traffic, and proposed building a highway traffic anomaly intelligent recognition system based on the three-dimensional vision. The developed system can automatically detect and identify abnormal traffic events during inspection and give timely warning.
Key words:binocular vision; three-dimensional vision;highway; traffic event
猜你喜欢
中国交通信息化(2020年8期)2021-01-26
中国交通信息化(2020年10期)2021-01-14
中国交通信息化(2019年6期)2019-08-23
中国交通信息化(2017年3期)2017-06-08
中国交通信息化(2016年9期)2016-06-06
河南科技(2014年18期)2014-02-27
