基于体感识别的学生引体向上训练系统
2018-03-03 18:30李文博周磊
物联网技术 2018年2期
李文博+周磊

摘 要:学生体质状态一直以来都是社会关注的热点,其中力量问题尤为明显,而目前尚未有合理有效的办法改善这一状况。文中提出的引体向上训练系统,结合物联网技术和机器视觉中的体感识别技术,利用云服务搭建了完整的解决方案架构,实现了学生日常引体向上训练的自动化和数据化,同时使得管理更科学、简单。系统主要运用Kinect V2智能摄像头传感器提取运动骨骼数据,使用步态识别算法与设计的有限状态机运动模板匹配进行引体向上运动识别,将用户个人信息以及运动结果在Web端显示。研究工作也为日常运动识别和训练提供了新的研究角度和方向。
关键词:物联网;体感识别;Kinect V2;引体向上;步态识别
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2018)02-00-03
0 引 言
随着经济的飞速发展,我国的GDP总量已位居世界第二,人民生活质量得到了很大改善。但安逸的生活方式背后却隐藏着严重的健康隐患,其中学生的体质问题尤为突出。学生是21世纪我国发展的中坚力量,学生体质关系到祖国的未来,党和政府一直都非常重视学生的体质问题。
基于2000~2014年我国四次国民体质健康监测数据资料,结合历年《全国学生体质与健康调研》和《全国学生体质健康监测》报告及前人研究文献[1],使用文献分析和数理统计方法对近15年我国青少年体质状况进行分析。研究发现:我国青少年身体形态呈现持续增长趋势,肥胖检出率持续上升;肺活量和绝大多数身体素质指标在2005年以前持续下降,2010年开始止“跌”回升。
近年来,国家对青少年体质的高度重视与体育事业的蓬勃发展,尤其是2008年阳光体育运动的开展,使学生耐力素质得到了极大改善,但学生的力量、爆发力、平衡等问题却仍止步不前。当前,各校都在采取相应的措施和方案来鼓励大学生在体育课外,利用业余时间积极投入到体育锻炼中,但尚未找到行之有效的办法。
随着机器视觉技术的崛起,采用智能摄像头结合适用于相应应用的识别算法高效解决生活、生产中出现的问题前景广阔[2]。
依据《国家学生体质健康标准》,本系统运用微软KinectV2智能摄像头开发出了一套解决学生日常引体向上运动训练难以管理、指导的问题,可有效改善学生上肢力量差的现状。
1 关键技术介绍
1.1 机器视觉
机器视觉作为人工智能领域的一个分支,即机器模拟人类的视觉认知处理能力,将摄取的图像信息传送至图像处理系统,在无需人为干预的情况下挖掘处理图像视频中低层次的数字化数据,并转译为高层次信息输出,以达到近似人类对视觉信号的理解能力。该技术起源于上世纪60年代,但由于图像采集和计算机计算能力的局限性,直到2010年才迎来爆发式的增长,目前在智能化视频监控、基于内容的视频检索、医疗领域、人机交互、体育领域等行业中有着广泛的应用前景和价值,国内外众多知名高校以及研究机构进行了大量研究,同时科技公司也积极投入人力物力挖掘其市场应用场景和社会价值[3,4]。
1.2 Kinect V2
2014年10月微软发布了Kinect for Windows新一代产品Kinect V2[5]。与2012年发布的第一代产品相比,有了重大的性能提升。Kinect是一种3D体感摄影机,主要包含麦克风阵列、深度图像所使用的红外线发射器和红外接收器及RGB摄像头。Kinect V2组成如图1所示。
Kinect运用分隔策略将人体从背景中分离出来,并将分离出的人体部分图像再通过一个由微软开发的以TB计的数据输入到集群系统训练出的人体各部位识别模型中,生产出25关节点的人体骨架模型,以约30 f/s的速度输出骨骼数据,最多可同时识别6人[5,6]。Kinect智能摄像头所输出的骨骼关节数据为人体动作识别提供了基础,解决了计算机视觉对于人体运动时空序列数据提取的难题。
2 硬件组成
本系统硬件设备包括Kinect V2摄像头传感器、计算机、RFID读卡器、显示设备及云服务器。硬件连接组成如图2所示。
本系统使用的Kinect V2传感器已包含电源线和USB 3.0数据线。待连接的计算机需满足以下条件[7]:
(1)CPU必须支持64位系统。
(2)USB需满足USB 3.0的要求,USB 3.0可以通过PCIE扩展口安装。
(3)显卡需支持DirectX 11。
(4)操作系统为64位,Win8版本及以上。
(5)内存需达到4 G以上。
计算机为处理前端读卡器和Kinect摄像头所需的硬件平台,可方便用户输入数据,也可通过与自行开发的配套软件相结合,实时检测用户引体向上的情况,同时还可将用户数据上传至云端服务器进行处理。
本系统硬件CPU采用英特尔7代G-4600处理器,主频为3.6 GHz,搭载64位Windows10操作系统,核显支持DirectX 11,满足Kinect设备运行的硬件要求,极具性价比。主板采用技嘉 GIGABYTE B85-HD3,可满足文中对USB提出的要求。
3 軟件设计
3.1 系统架构及开发平台的选择
本系统软硬件通过USB 3.0进行数据交互,客户端和云端通信采用TCP/IP通信协议,软件整体设计流程如图3所示。
本系统设计基于.NET平台。.NET平台是微软公司开发的技术平台,主要运行在Windows 操作系统上,可与同为微软旗下的Kinect兼容[8]。此外,.NET平台还支持多种开发语言,如C#、C++、F#、Python等,在编译时期,.NET平台会将这些语言编译成统一的CLR(Common Language Runtime,CLR),可无差别地运行在.NET平台上。微软还推出了被誉为世上最好用集成开发环境(Integrated Develop Environment,IDE)的Visual Studio,使得.NET平台极具吸引力。其中客户端的设计开发采用C#,云端服务器的开发采用Python。endprint
3.2 客户端软件设计
3.2.1 客户端功能
客户端具有如下功能:
(1)使用者信息的采集。学生训练系统采用学生日常最常用的校园卡作为信息采集源,包含學生卡号,可通过USB读取学生信息,显示并保存。
(2)通过USB 3.0连接Kinect采集运动数据,客户端识别运动,判断使用者的使用情况,并记录保存。
(3)客户端连接前端显示设备将用户信息和实时运动情况反馈至各使用者,实现良好的交互效果。
(4)客户端可将使用者的信息和运动结果上传至云端服务器。
3.2.2 引体向上识别算法
本系统最核心的部分是对于引体向上运动的识别算法,运动识别流程如图4所示。
采用步态识别算法提取骨骼特征和运动特征[9],并将这两种特征序列数据分别与标准骨骼数据、标准运动数据相匹配。骨骼特征主要计算多个骨骼点在三维空间的相对角度。Kinect V2坐标系如图5所示。
本系统中的骨骼特征提取以Kinect坐标系中的计算为基础。假设运动的肩膀、肘部、手部姿势如图6所示,那么映射到Kinect 坐标系时如图7所示。
只需要通过计算向量,的夹角θ即可得到空间坐标中肘部所成的夹角。计算公式如下:
在骨骼特征提取过程中,每个骨骼特征序列都由通过上述骨骼角度方法计算得到的一系列相对角度组成,以表示当前某一时刻用户运动姿势的特征点。运动特征提取是在骨骼特征提取的基础上针对运动的识别与检测,目的在于提高针对引体向上运动识别的准确性和运动完整度。
引体向上状态机[10]描述如图8所示。
直臂悬垂状态的姿势即两手用宽握距正握单杠,略宽于肩,两脚离地,两臂自然下垂伸直。这是引体向上每一个运动周期的起始姿势。
引体向上的姿势为头部上升至单杠上方,双手和双臂之间成弯曲角度。这是整个运动过程中的上升和下降转折点。
(1)引体向上特征提取
引体向上的运动姿势转化如图9所示。
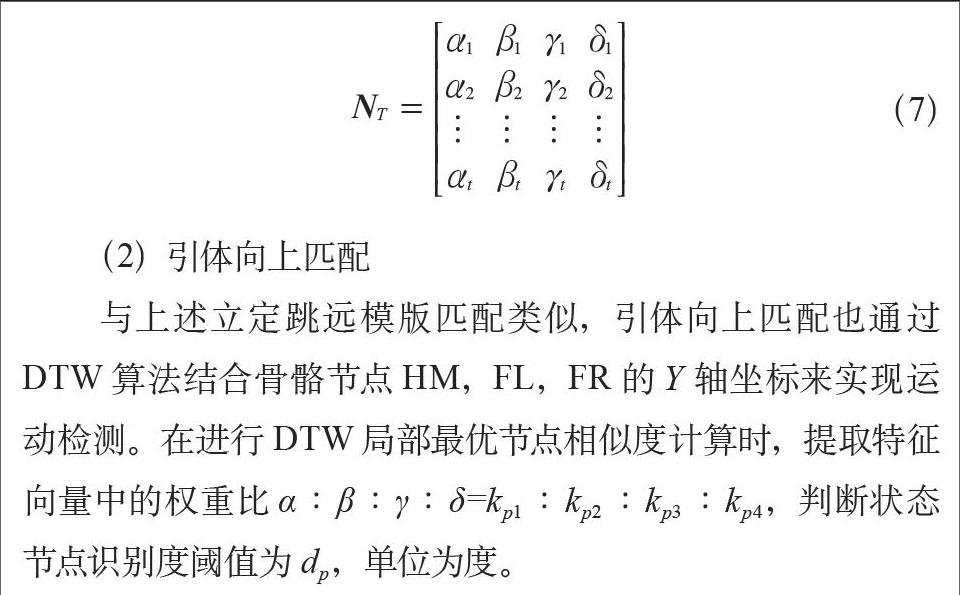
本系统设定与的夹角为α,与的夹角为β,与的夹角为γ,与的夹角为δ。其中,β和δ指肩膀的旋转角度。骨骼特征提取矩阵见式(7),其中T,t分别表示引体向上的运动周期,即完成一次引体向上的时间。
(2)引体向上匹配
与上述立定跳远模版匹配类似,引体向上匹配也通过DTW算法结合骨骼节点HM,FL,FR的Y轴坐标来实现运动检测。在进行DTW局部最优节点相似度计算时,提取特征向量中的权重比α∶β∶γ∶δ=kp1∶kp2∶kp3∶kp4,判断状态节点识别度阈值为dp,单位为度。
3.3 云端软件设计
为了完善该系统,还为系统加入了云端服务系统,使得运动数据可被使用者更方便地利用与保存,为系统的扩展和实用增加了更多可能。本系统云端采用由Python语言和Django框架结合而成的MySQL数据库,从而成功搭建了一个完整的Web平台。Python是目前最流行的编程语言之一。Django是Python语言编写的最优秀的Web框架之一,采用的MVC框架模式[3]具有易开发,便于更新维护,移植性好等特点。将终端发送的用户信息和引体向上运动数据上传存储,主要实现数据预处理、Web端交互、查询与导出数据等功能。
4 结 语
本文介绍的基于体感识别的学生引体向上训练系统,运用现有技术手段解决了社会实际中遇到的学生健康运动问题,实现了科学管理学生引体向上运动的目标。结合当下物联网技术,文中介绍的全新解决方案为类似运动检测与管理的实现提供了新的角度。
本系统已在一家学校使用,运行状态良好,深得师生喜爱,证明了本文提出的基于体感识别的学生引体向上训练系统具有可行性。
参考文献
[1]张洋,何玲.中国青少年体质健康状况动态分析——基于2000—2014年四次国民体质健康监测数据[J].中国青年研究,2016(6):4-12.
[2]李拟珺.基于计算机视觉的人体动作识别技术研究[D].南京:东南大学, 2015.
[3]胡琼,秦磊,黄庆明.基于视觉的人体动作识别综述[J].计算机学报,2013,26(12):2512-2524.
[4]胥磊.机器视觉技术的发展现状与展望[J].设备管理与维修,2016(9):7-9.
[5]李诗锐,李琪,李海洋,等.基于Kinect v2的实时精确三维重建系统[J].软件学报,2016,27(10):2519-2529.
[6]王梅,于远芳,屠大维,等.基于Kinect的环境平面特征提取与重构[J].计算机应用, 2016, 36(5):1366-1370.
[7] Abhijit J. Kinect for Windows SDK Programming Guide[M].UK:Packt Publishing,2012.
[8]余涛.Kinect应用开发实战:用最自然的方式与机器对话[M].北京:机械工业出版社, 2013.
[9] Kastaniotis D, Theoharatos C, Theoharatos C, et al. A framework for gait-based recognition using Kinect[J].Pattern Recognition Letters, 2015,68(2):327-335.
[10]吴进.机器视觉中快速模版匹配算法研究[J].新型工业化,2014 (1):65-69.endprint
猜你喜欢
体育教学(2016年10期)2016-12-01
中国新通信(2016年16期)2016-10-18
科学与财富(2016年28期)2016-10-14
环球时报(2016-08-01)2016-08-01