
PHEV动力系统参数匹配及Cruise性能仿真研究
2018-03-01 00:32崔淑华马煜森
重庆理工大学学报(自然科学) 2018年1期
崔淑华,马煜森
(东北林业大学, 哈尔滨 150040)
插电式混合动力汽车集合了传统内燃机和纯电动汽车的优点,当行驶里程短时采用纯电动模式,行驶里程长时采用混合动力模式[1-2]。它可在晚间低谷时使用外部电网对车载动力电池进行充电,不仅可以削峰填谷缓解电网供电压力[3],而且可以降低对石油的依赖,是一种有较好发展前景的混合动力汽车,也是向最终的清洁能源汽车过渡的最佳方案之一[4-5]。插电式混合动力汽车需求功率的大小直接影响了车辆的能量消耗,因此准确地计算出需求功率并进行匹配是合理使用PHEV电能、提高PHEV使用性能的基础。
1 整车参数和动力系统构型
在开发初期,插电式混合动力汽车动力总成设计取决于车辆设计目标的设定,即在进行动力系统参数匹配时应充分考虑目标车型中发动机和电机的工作模式。图1所示为实际研发项目中的某PHEV的动力传动系统布置,发动机与发电机/电动机以转矩方式进行耦合,其整车基本参数见表1,制定目标车型PHEV的动力性和经济性性能指标如表2、表3所示。
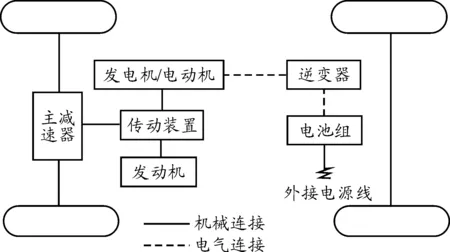
图1 插电式混合动力电动汽车动力传动系统布置
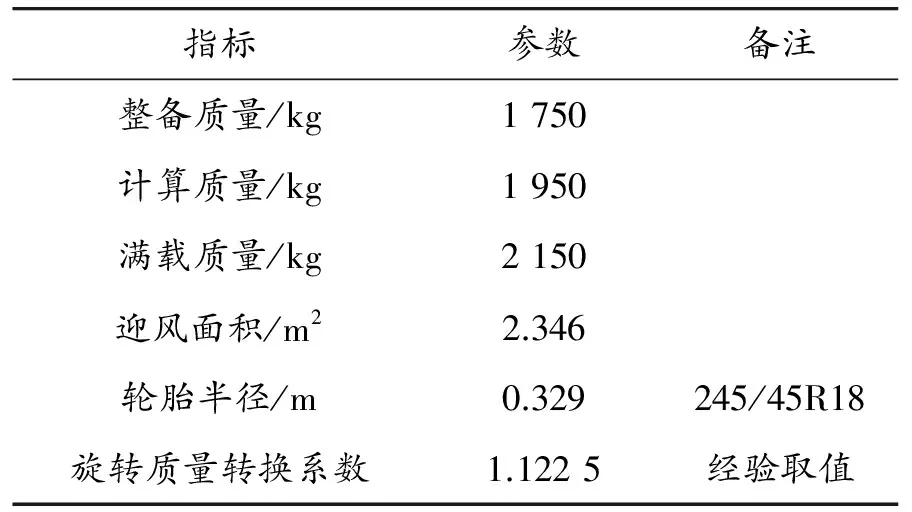
表1 整车基本参数
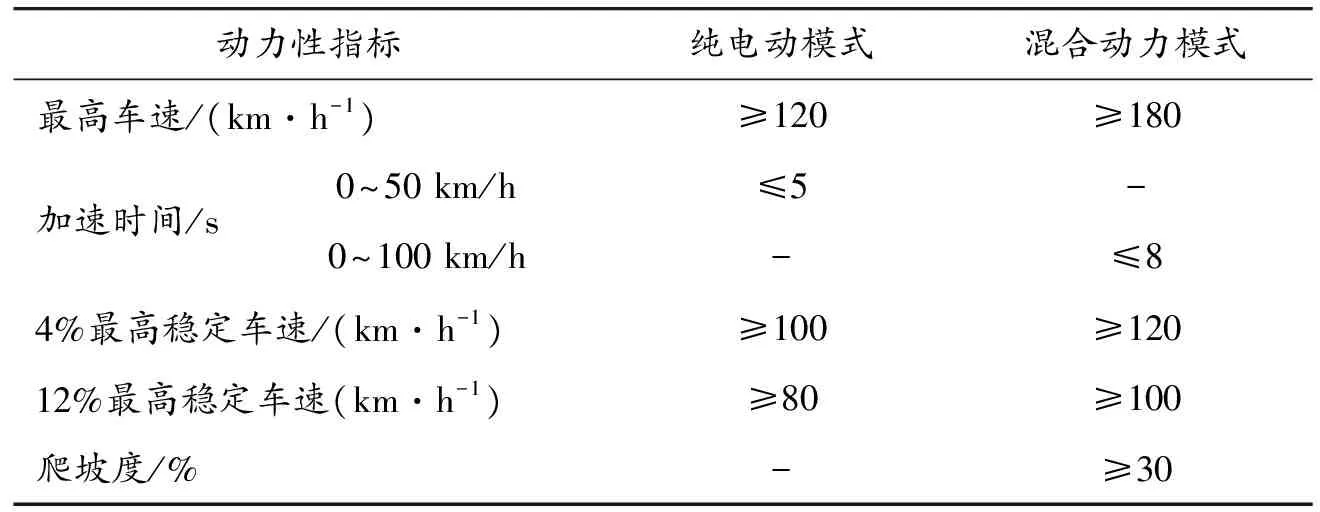
表2 目标车型动力性能指标

表3 目标车型经济性能
2 整车动力系统参数计算
2.1 电机参数设计
为了改善整车经济性和排放性,插电式混合动力汽车一般由包含电动机的电驱动系统起步,通过消耗动力电池内部的电能来驱动汽车行驶,在电池荷电状态下降到设定的阈值之前一直工作在纯电动驱动模式下。因此,插电式混合动力汽车电机应具有启动整车能力、以一定车速在纯电动模式下行驶的能力和一定的爬坡能力。
1) 电机转矩计算

图2 纯电动模式不同车速下电机转矩与起步加速度关系
对中国、美国、欧洲和日本主要循环工况下的车辆加速度值进行统计,可知PHEV的最大起步加速度在2.0~2.5 m·s-2范围时即可满足车辆在绝大部分情况下以纯电动模式起步的要求[6]。在车辆传动系统参数不变的情况下,车辆纯电动起步加速度取决于电机转矩,见式(1)。纯电动模式不同车速和不同电机转矩下的纯电动起步加速度如图2所示,当电机转矩为300~350 N·m时,满足PHEV起步加速度需求。
(1)
式中:m为整车质量;δ为旋转质量转换系数;Tm为电机转矩;im为电机合成箱速比;io为主减速器速比;ηtm为电机到车轮端的传动效率;r为车轮滚动半径;CD为空气阻力系数;A为迎风面积;f为摩擦阻力系数;g为重力系数;v为时间为t时的当前车速。
2) 电机转速计算
整车性能目标要求最高车速180 km/h时,对应电机转速为9 433 r/min。因此,要求电机的最高转速为10 000 r/min,这属于高速电机,采用交流感应电机是比较容易实现的。
3) 电机峰值功率计算
对于大多数汽车,动力源的最大功率通常由加速性指标决定,即加速阶段的功率足以满足最高车速和爬坡要求[7]。汽车在水平路面上加速时,根据整车加速过程动力学方程,其瞬态过程总功率如下:
(2)
汽车起步加速过程车速曲线可以按式(3)来近似表示[8]。
(3)
由式(1)和(2)可得汽车在加速过程中所需的总功率为
(4)
其中:x为拟合系数,一般为0.5左右;tf、vf分别为加速过程的时间和末车速;t为时间;v为时间为t时的当前车速;Pall为加速过程总功率;δ为旋转质量转换系数。
代入相关参数,可得此时电机峰值功率约为170 kW。
2.2 电池参数设计
对于功率型电池,电池参数匹配一般要满足系统的电压等级、功率要求、最大充放电电流等限制。对于高速电动车辆动力电池系统的额定电压等级,参照GB/T31466—2005《电动车辆高压系统等级》,可选择144、288、320、346、400、576 V等。本文选定电池组的额定电压为346 V。

表4 纯电动模式不同工况下所需功率
电池组容量为电池组总能量与额定电压的比值,而电池组总能量需要根据纯电动模式下的续驶里程确定,即
(5)
(6)
其中:C为电池容量;Q为电池总能量;SOCH为电池承受较大充放电电流的SOC下限值;SOCL为电池承受较大充放电电流的SOC上限值;Ub为电池组额定电压;va为车辆纯电动恒速行驶的车速;Sa为纯电动行驶里程。
对于特定的容量和工作电压,电池组的充放电功率会随着SOC的变化而变化,SOC下降时,最大充电功率增大,而最大放电功率则减小。当SOC在30%~70% 时能够承受较大的充放电电流[9]。因此,车辆在纯电动模式下以60 km/h恒定车速行驶65 km时,所需电池总能量为6 kW/h,电池容量为27 Ah。
2.3 发动机功率与总功率需求
发动机功率的设计取决于PHEV混合模式下的控制策略。在车辆没有峰值电源的情况下,发动机应能供给足够的功率,以保证车辆可按一定的巡航车速运行于水路面上且有剩余功率为电池充电。
在发动机功率计算时,v的具体取值与车辆动力性能具体要求和整车的控制策略有关。若按最高车速vmax进行计算,则发动机的功率值偏大,在运行时会导致整车功率浪费;另一方面,我国汽车在城市主干路上行驶的平均行驶车速为16~30 km/h[10],若按行车的平均车速vave计算,则发动机的功率取值偏小,无法满足部分行驶工况,如急加速、爬坡等。结合我国车辆和路况的实际情况,v的取值应介于平均车速与最高车速之间,即:
vave≤v≤vmax
(7)
因此,如在6%坡度上以120 km/h巡航车速行驶时,发动机的功率P=70 kW。考虑18~20 kW的发动机所带附件功率及为电池充电预留10%余量[11],则发动机的功率应为96~99 kW。
3 整车性能仿真分析
3.1 整车CRUISE仿真模型搭建
根据以上匹配参数,基于AVL CRUISE搭建的整车仿真模型,如图3所示。
3.2 整车控制策略模型搭建
基于Matlab/Simulink搭建整车控制策略模型,如图4所示。整车控制策略模型主要包括三大模块:整车工作模式判断模块、制动能量回收模块和扭矩分配模块。车辆运行模式主要依据驾驶员扭矩请求、电池SOC、油门开度及车速等信息选择纯电动和混合动力模式。制动能量回收模式主要根据制动踏板和加速踏板信息,结合车辆行驶状态,电机、电池的有效负荷计算制动减速度,当满足制动回馈条件时,将能量回馈给电池。扭矩分配模块,混合动力模式下扭矩分配主要涉及电机助力或发电工况扭矩分配。
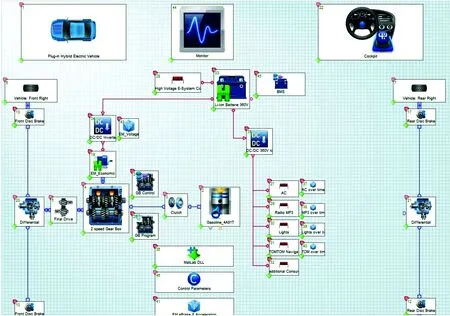
图3 整车仿真模型
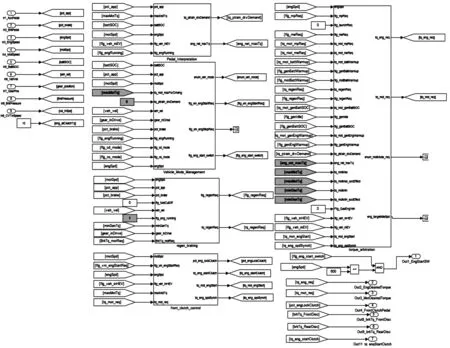
图4 整车控制策略模型
3.3 变速器换挡策略
进行整车动力性、经济性仿真分析时,需要考虑变速器换挡策略。文中采用Cruise自带的换挡规律,在仿真模型搭建时,GB Control模块设定车速或转速的换挡点。其换挡点设定和换挡控制原理分别如图5和6所示。
3.4 仿真结果及分析
基于模型分别进行动力性和经济性仿真,其中动力性仿真结果如表5所示,纯电动模式下0~50 km/h加速过程如图7所示,混合模式下50~100 km/h加速过程如图8所示。
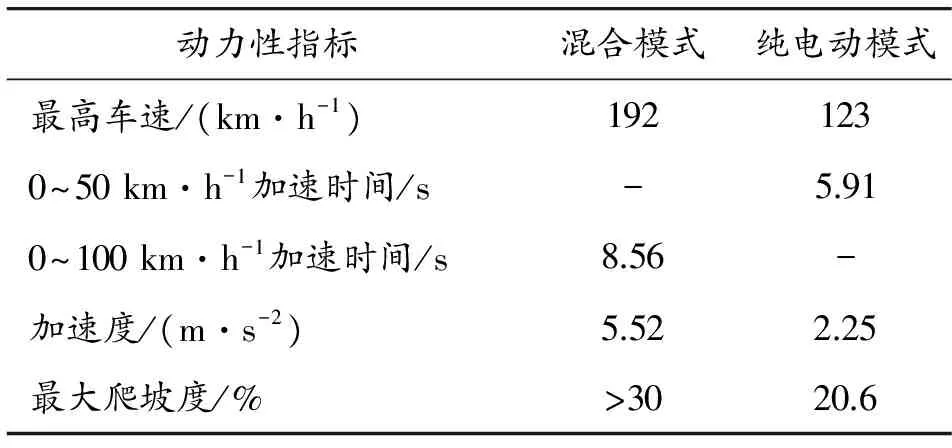
表5 整车动力性仿真结果

图5 变速箱换挡点设定
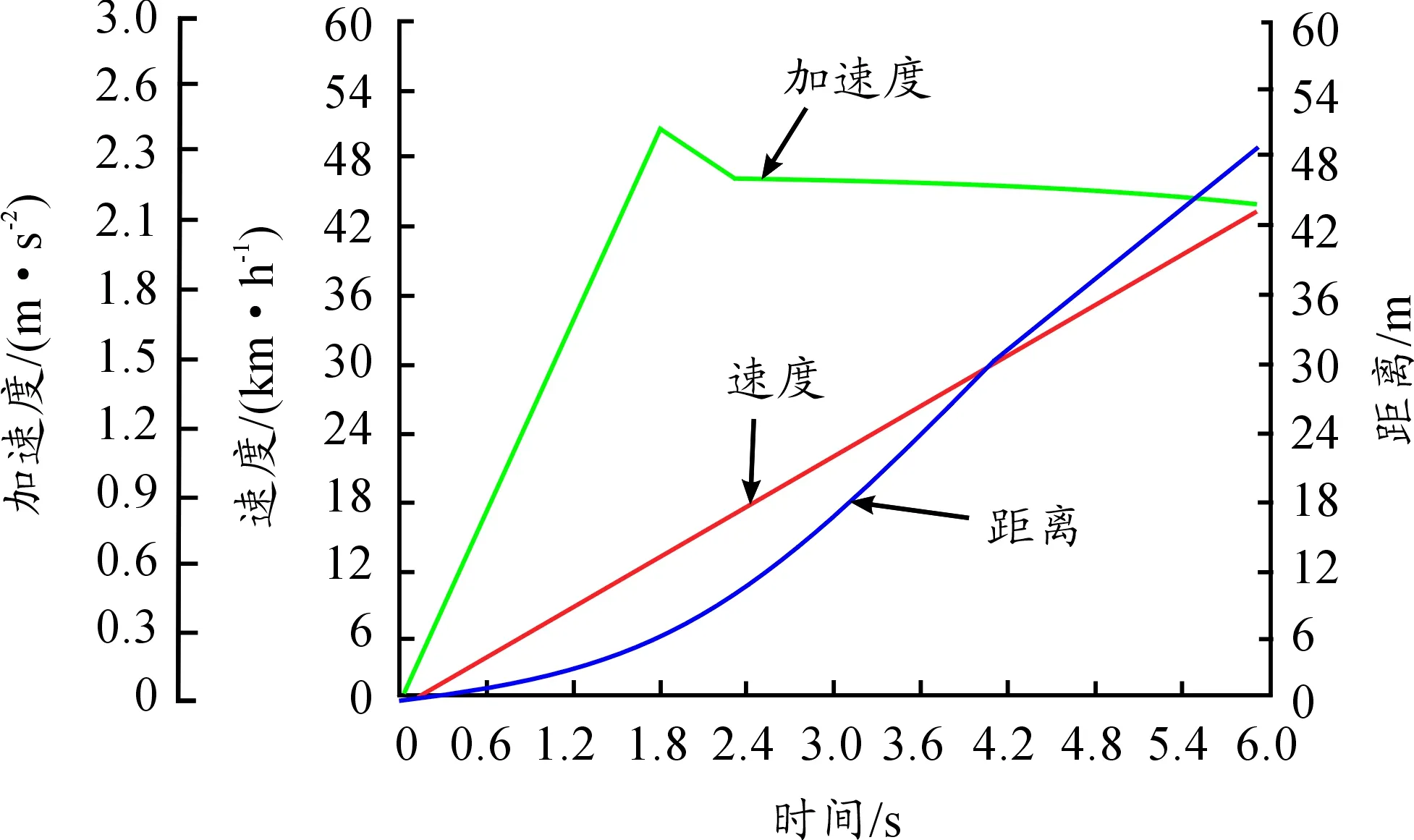
图7 0~50 km/h加速过程
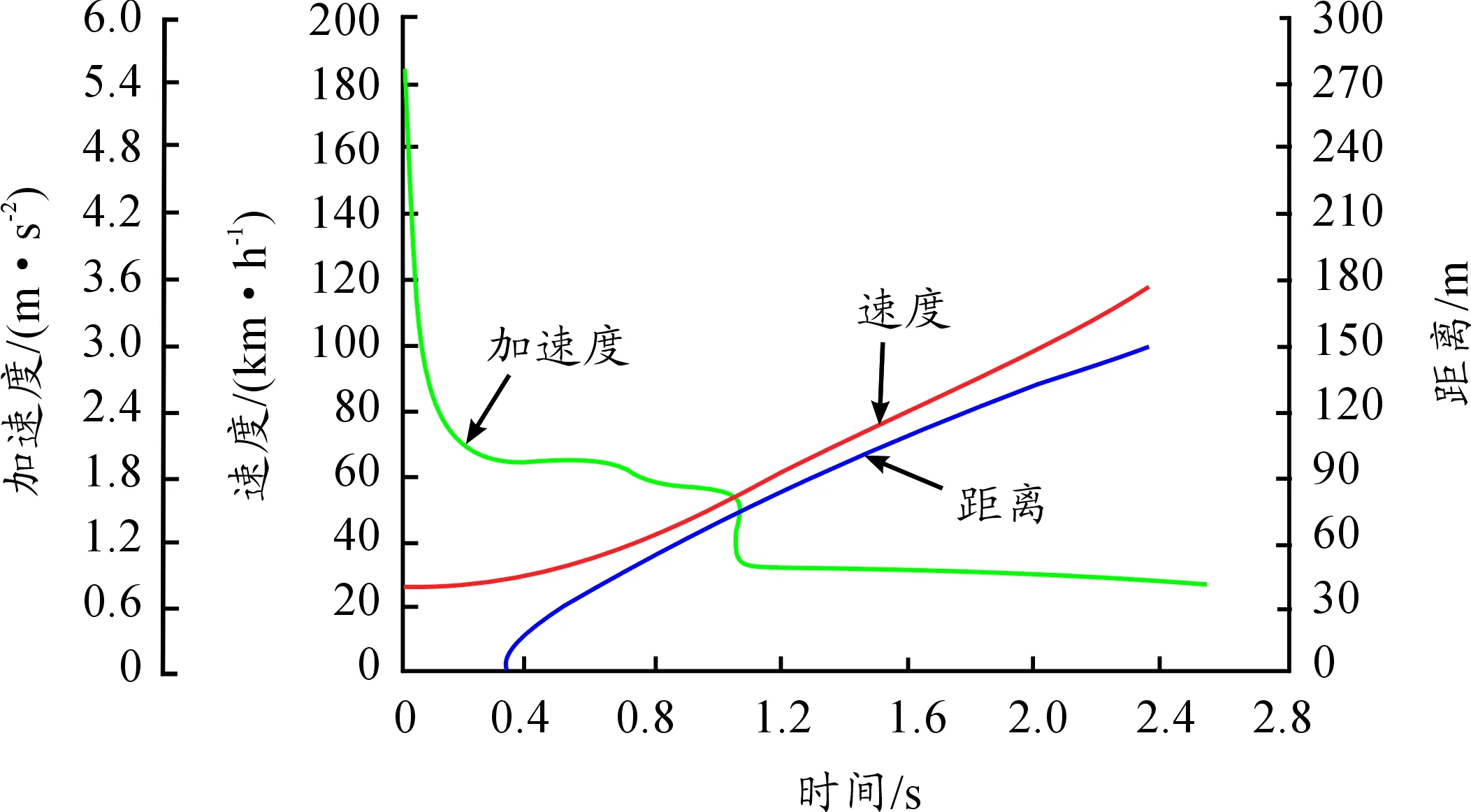
图8 50~100 km/h加速过程
由表2可知:动力性仿真结果基本符合整车性能目标。百公里加速性能与目标设定值存在偏差。由图7与图8可见:在百公里高速段加速时,由纯电动模式转换到混合驱动模式,存在模式切换,动力合成箱中有动力中断,所以0~100 km/h加速性较差。
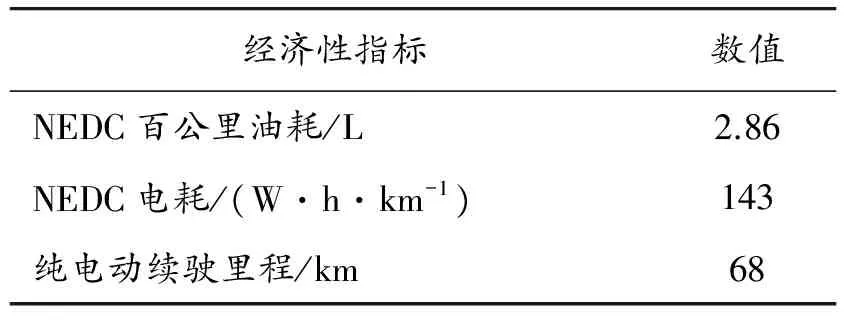
表6 整车经济性仿真结果
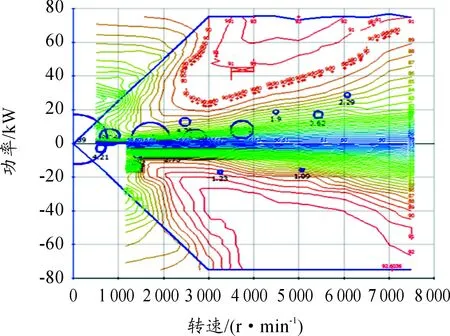
图9 NEDC工况下电机分布点
整车经济性仿真依据GB/T19753—2013《轻型混合动力电动汽车能量消耗量试验方法》进行NEDC油耗与电耗分析。纯电动续驶里程根据ECE R101-09版,SOC从90%降到20%的要求获得,仿真结果如表6所示,可见基本满足整车性能要求。图9为电机在NEDC工况下的工作点分布及效率区间图。由图可以看出:电机工作效率区间为80%~90%,导致电能损耗较大。
4 结束语
PHEV性能指标要求与传统内燃机汽车不同,在确定整车动力系统布置方案和运行模式的基础上,首先应参考相关标准制定合理的动力性与经济性指标,对动力系统各参数进行分析计算。其次,运用Cruise仿真软件进一步确定混合动力电动汽车动力系统匹配参数,并分析整车性能仿真结果是否满足设计要求,为产品开发提供依据。本文仿真结果中动力合成箱模式切换造成加速性能不良、电机运行效率偏低的问题,与动力与传动系统的控制策略有关,因此应在此基础上进行控制策略的优化研究,以提高整车性能。
[1] 张冰战.插电式混合动力电动汽车能量管理策略研究[D].合肥:合肥工业大学,2011.
[2] MASAYUKI K,TOSHIFUMI T.Development of Toyota plug-in hybrid system[J].Sae World Congress & Exhibition,2011,18 (11):1634-1641.
[3] 吴为理.插电式混合动力汽车动力耦合系统设计及应用研究[D].广州:华南理工大学,2012.
[4] 曹明轩.插电式混合动力电动汽车的运动过程控制策略研究[D].广州:华南理工大学,2013.
[5] 张亿.插电式混合动力汽车动力耦合系统设计与性能研究[D].重庆:重庆大学,2014.
[6] 李骏,赵子亮,刘明辉,等.插电式双电机强混合动力轿车的参数匹配[J].吉林大学学报(工学版),2011,41(2):298-302.
[7] 曾小华,王庆年,宋大凤.汽车功率需求的简单求解方法[J].吉林大学学报(工学版),2011,41(3):613-617.
[8] NG H K,VYAS A D,SANTINI D J.The prospects for hybrid electric vehicles,2005—2020:Results of a delphi study[C]//Argonne National Laboratory,ANL/ES/CP-99612,1999.
[9] 王芳,夏军.电动汽车动力电池系统设计与制造技术[M].北京:科学出版社,2017.
[10] 张开斌,阮廷勇.中国六城市汽车行驶工况的测试统计分析[J].汽车研究与开发,2005(12):33-36.
[11] HOWELL J R,BUCKIUS R O.Fundamentals of engineering thermo dynamics[M].McGraw-Hill Book Co,1992,82(7):9.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
电气技术(2016年7期)2016-09-06
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20
