
南海张力腿平台集成监控系统设计
2018-03-01 02:46:53,,,,
船海工程 2018年1期
,,,,
(海洋石油工程股份有限公司,天津 300451)
随着近海油气资源的愈发枯竭,南海300 m水深以深勘探开发近年来已成为热点。南海环境条件恶劣,近年来超强台风等极具破坏力的极端海况频繁出现,对平台安全性提出了严峻挑战。与其他深海浮式平台相比,张力腿平台(tension leg platform,TLP)因其适用水深范围广、耐波性能优良.可干式采油等优点在国际上得到了广泛应用,虽起步较晚,但发展迅速,有望成为南海深水油气田开发的重要装备之一。张力腿平台需要一直在位抵抗恶劣的环境载荷,为其配备一套科学的集成监控系统(integrated marine monitoring system, IMMS),是对其最直接的研究方法和安全保障措施,也是完整性管理技术中的核心部分。目前在与南海环境条件类似的墨西哥湾,几乎所有的大型浮式平台都已经安装了现场监控系统。
在IMMS概念诞生之前,包括环境监测,应力监测,姿态监测等子系统已经存在。实际使用过程中伴随着硬件配置的共用,数据交互和操作便利化的需求,逐渐出现了集成的产品和专门进行系统集成的厂家,他们会针对海洋环境条件进行特殊设计,如一些高湿、高盐、防火、防爆等的考虑和系统的冗余设计。
国外已经开展过一些类似的工作,BMT 公司在1987 年最早尝试在一座服役的TLP 平台上进行现场监测,对风速、波浪、海流等要素,以及浮体的运动情况进行了尝试性的测量。由此,海洋平台现场监测工作迅速展开[1],2H Offshore、Fugro、Insensys、RTI、StainStall等公司[2]积累了大量的成熟经验并开发了许多实用的监测设备或仪表及评价软件;其主要用于风、浪、流、立管涡激振动/疲劳、立管/锚链张力等数据监测,通过实测数据与设计数据的对比,评估设施的完整性,为油气田正常安全运营提供保障。Radboud和Henk[3]对在Marco Polo TLP上得到的原型监测数据进行分析,并将数值和水池模型试验的结果进行对比。R.N.Perego等[4]通过对Marlin TLP在飓风Ivan下的测量数据进行分析,在监测数据的数值应用方面进行了有益的尝试。Edwards[5]等通过对近年来安装在墨西哥湾的17座深水浮式平台的IMMS系统的回顾,从功能上和技术上对IMMS系统进行了总结。
国内最早由中海油和大连理工大学在渤海的多条FPSO如明珠号、HYSY112,HYSY113上安装了环境监测、应力监测和船体姿态监测设备,可看作是IMMS系统雏形。近年来随着系统的日趋完善和监测数据的积累,取得了众多研究成果并培养了大批的工程科研人员[6- 7],有效地指导了工程实际。
目前国内惟一一条半潜式生产平台“南海挑战号”上同样安装有简易的监测系统,获得了大量宝贵的数据,在深海平台现场监测领域迈出了重要的一步。
1 系统组成及参数选取
1.1 主要监测功能
1)监测风、浪、流、气压、能见度等环境参数。
2)监测张力腿张力。
3)监测顶张式立管(top tensioned riser,TTR)的受力和冲程。
4)监测平台方位、朝向、运动和气隙等。
5)根据监测数据计算平台重量重心,指导海上操作。
分别对应于环境条件监测系统、张力监测系统、TTR监测系统、运动监测系统和载荷管理系统。系统组成见图1。

图1 IMMS系统功能组成
1.2 监测参数选择
对过往平台的失效模式进行系统的总结和分析,是IMMS系统选取监测参数的基础。根据2009年英国健康与安全执行署HSE 2009年发布的数据,将浮式平台的失效模式概括如下[8]。
1)平台总体失效:包括总体失稳后翻沉和倾覆、结构的疲劳和屈曲等。
2)平台系泊失效:包括走锚、系泊腿断裂和浮体位移过大等。
3)立管失效:包括立管泄露和受损等。
张力腿平台的IMMS系统最主要的作用是对日常操作提供参考和记录,如实时记录张力筋腱(tendon)和顶张式立管(TTR)受力,装载工况等;指导现场操作和辅助决策,如TTR监测系统就会在液缸压力低或超出冲程限值时报警。除此之外,对环境条件的监测包括风速、风向、流速、流向、波高、周期、浪向等数据也可作为当地水文气象积累,并为后续实施项目提供参考。在极端环境条件下的平台位移、气隙和tendon受力等时历数据是进行总体性能评估和修正数值模型的重要依据,IMMS系统的主要监控参数见表1。
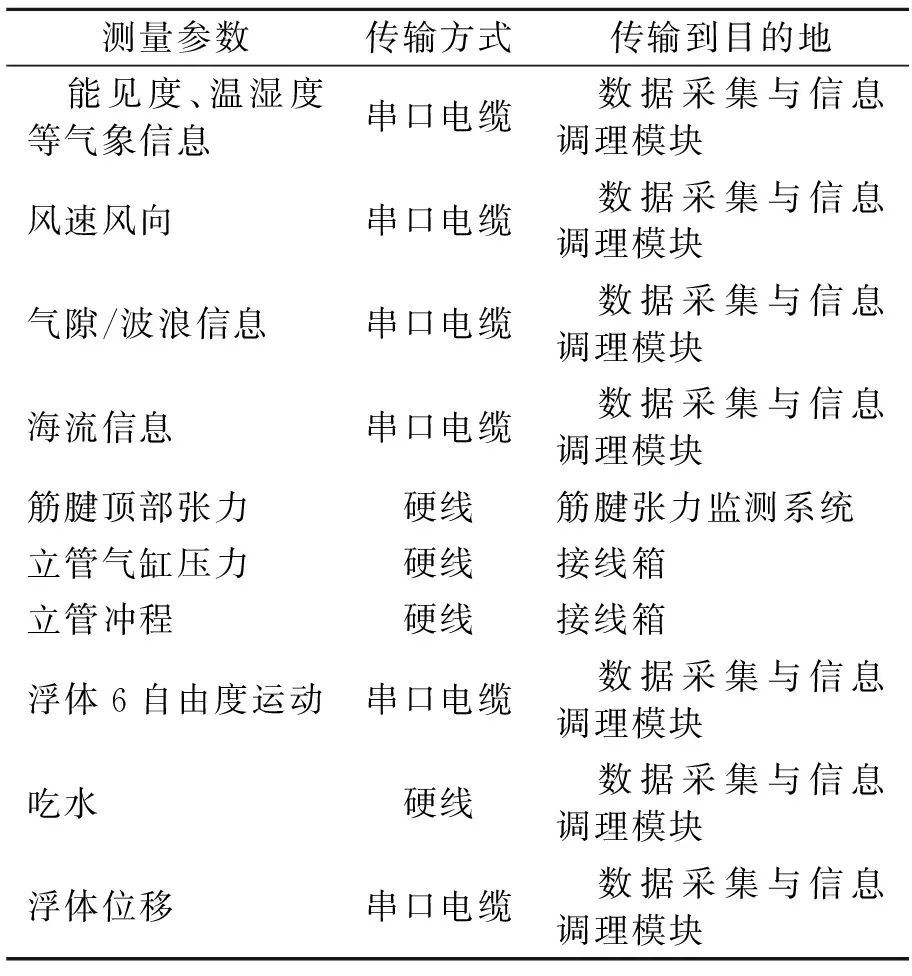
表1 IMMS系统主要监控参数
2 系统构建及布置方案
2.1 系统构建
2.1.1 海洋环境监测系统(weather monitoring system,WMS)
深海环境监测的内容主要包括风、浪、流、大气4类信息,其中气温、相对湿度、大气压、降水量、能见度等气象数据属于常规监测范畴。
对于风要素的监测,一般采用超声波风速仪和机械式风速仪来测量风速,测量手段成熟,两类设备同时采用可互为补充和校验。
对于波浪要素的监测,在海洋环境中相对困难。目前使用较多的是压力式波浪仪、声学波浪仪和雷达波浪仪。在测量的过程中,根据需求的不同选择测量方法。对于TLP平台,关注重点在于波面与平台底部气息,推荐采用雷达测波仪进行波浪参数测量。
对于海流要素的监测,需要兼顾流速、流向及其在水深范围内的分布,由于南海内波的存在,流剖面的监测具有更大的现实意义。非机械式海流传感器一般采用声学多普勒流速剖面仪(acoustic Doppler current profilers,ADCP),它能测出不同水层的流速,符合浮式海洋平台的测量要求,具有量程大、历时短、分辨率高、测量时流场不被扰动的特点,较为适合张力腿平台使用。
2.1.2 平台位置和运动监测系统(MMS)
由于受到风、浪、流等环境荷载的作用,张力腿平台在海上做6个自由度的运动,在恶劣海况下,平台可能会发生较大的摆动,超出安全区,造成事故,因此需要对平台的位置和运动情况进行监测。MMS包括惯性测量单元、吃水监测及差分GPS定位,其中惯性测量单元解算出的纵横倾可用于对吃水测量进行验证。
1)位置监测。比较普遍应用的测量方法是GPS或DGNSS测量方法。常规的GPS定位无法满足浮式海洋平台位移测量精度的要求。RTK(Real time kinematic)是基于载波相位差分的实时动态定位技术,定位精度可达到厘米级。由于张力腿平台具有深吃水的特性,在特定流速诱导下可能发生涡激运动现象,位置监测数据可为这种复杂水动力现象研究提供数据支持。
2)运动姿态监测。使用惯导和GPS的组合系统测量张力腿平台的运动姿态。惯性导航具有全天候工作、不依赖外界信息、抗干扰强、隐蔽性好等优点,但它长时间工作会有累积误差。而GPS导航精度很高,但由于载体的运动常使接收机捕捉不到卫星信号。INS/GPS组合导航系统具备2种技术的优点,可充分发挥惯性产品能自主工作、抗干扰性强、动态性能好的优势,与GPS无飘移和无累积误差,系统地实时跟踪对准性能、导航精度和整体方位姿态测量精度得到提高。
2.1.3 张力筋腱的张力监测系统(TTMS)
张力筋腱在极端载荷的作用下可能会发生强度失效,此外涡激振动以及平台在海浪作用下的不规则运动均会引起张力筋腱内的交变应力,在交变应力作用下,结构中的微小缺陷可能发生疲劳扩展,因此,TLP张力筋腱的疲劳损伤同样是一个关键问题。
为确定张力腿的受力状态以及平台上部荷载的分布情况,进行TLP张力腿张力测量。当张力接近0甚至为负,或者超过其张力的许用值时,表明上部荷载或环境荷载超过设计许用值。TTMS通过对张力筋腱的张力、弯曲载荷的监测,提供实时和历史数据的查询并提供报警功能,并结合特定算法,分析并辅助调整平台的重量分配。
2.1.4 顶部张紧立管监测(TTRMS)
典型的生产TTR 系统包括:表面采油树、柔性跨接管、张紧器、张力节点、标准立管节点、立管连接器、应力节点、水下回接连接器和水下井口。
对于TTR立管,一般要对其顶部的拉力、弯矩、立管冲程和TTR的涡激振动(VIV)进行监测。它可以通过立管与平台间的相对位置来判断其是否在可允许范围之内,还反映出立管浮筒是否提供了适当的浮力。冲程的测量一般通过安装在平台底部与立管间的一个位置转换器进行,每个立管应该安装多个压力传感器和电位计来测量每个立管的受力和冲程。
2.2 布置方案
监测设备的安装位置既要考虑监测数据的准确性,同时也要兼顾设备安装和操维的便利性。
1)对于能见度监测(visibility measurement),云层监测(ceilometer),温度气压湿度监测,风速风向监测的统一要求为室外开阔无遮挡,不受工艺设备及直升机起降、空调、通风口等影响的区域,如可布置在吊机/钻机平台上;考虑冗余原则,选取的两个风速探头应布置在相似高度上,布置方位适当考虑当地海域主环境方向。 对应的记录器应就近配置。由于航空管理要求,如果直升机甲板处的风速、风向、气压等数据与邻近区域有显著差别,应在直升机甲板附近补充安装探头。
2)测波雷达布置在组块甲板上,靠近甲板外沿以保证波束不受遮挡;为保证雷达波束达到要求的扇形区域,安装高度建议在25~80 m之间。
3)ADCP流速仪贴近平台立柱固定在船体基线附近;为避免海生物对测量精度的影响,设备表面应进行防海生物涂装,同时要求安装配套的ADCP流速仪布置和回收装置。流速仪应与平台结构保持一定距离以避免局部结构、船体或系泊系统对测量结果可能造成的影响。
4)筋腱张力监测位于可位于抱紧器(tendon porch)或筋腱本身,视设备类型而定。
5)立管冲程测量传感器安装分别在井口区最外围四角的张紧器(Tensioner)上。
6)惯性运动测量单元安装位置一般在中控附近,布置时方向与浮体的轴线一致。
7)吃水测量设备布置在平台立柱顶端,靠近平台外侧。
8)GPS天线布置在室外开阔处,两组天线保证与平台轴线平行布置。
2.3 系统界面
完整的监控系统应是硬件设备与配套软件的集成,获取的硬件信息通过软件和终端进行直观的显示和操作。作为底层数据与顶层用户间的纽带,软件系统的友好程度直接决定着IMMS的用户体验,图2是某张力腿平台的IMMS界面。由图2可见,综合运用图形化和数字化的显示方法,监控信息可以较为完整地再现。

图2 某张力平台的IMMS界面
3 结论
张力腿平台的半顺应式特性,使其兼具固定式和浮式平台特征,其监控系统也需要结合自身特点进行设计。
建议结合以往项目经验,在系统设计时重点关注以下几个方面。
1)IMMS设备的可维护性,前期设计阶段需考虑服役期操维的便利性。
2)监测数据的完整和准确性,通过冗余原则,用于设备之间的相互校验及避免单个探头损坏时造成数据缺失。
3)IMMS系统应具备自检功能。
4)注重对监测数据的挖掘,如环境条件的极值统计,风向/浪向相关性分析,平台总体性能后报,平台位移与受力的同步性分析等。
[1] 杜宇,武文华,王延林,等.“南海挑战号”半潜式平台原型测量系统[J].海洋工程,2014,32(3):1- 7,21.
[2] 于毅.海洋结构物环境和动力响应实时监测重要性分析[J].中国造船,2013,54(2):145- 150.
[3] DIJK V R, B H. Full scale monitoring Marco Polo tension leg platform[C].Proceeding of the 26th International Conference on Offshore Mechanics and Arctic Engineering, 2007:OMAE2007—29635.
[4] PEREGO R,N. L G. BEYNET P A, et al. The marlin TLP: measured and predicted responses during hurricane Ivan [C]. Proceedings of Offshore Technology Conference Houston,USA, 2005: OTC 17335.
[5] EDWARDS R, PRISLIN I, JOHNSON T, et al. Review of 17 real- time,environment,response,and integrity monitoring systems on floating production platforms in the deep waters of the gulf of mexico[C] Proceedings of Offshore Technology Conference Houston,USA,2005: OTC 17650.
[6] 杨小龙,蔡元浪,宋安科,等.塔架式单点系泊FPSO监测与预警系统开发[J].船舶工程,2014,36(增刊1):198- 201.
[7] 樊哲良,王延林,岳前进,等.软钢臂监测的设计验证[J].哈尔滨工程大学学报,2016,37(3):306- 312.
[8] 廖景胜,周道成,欧进萍.浮式平台失效模式分析和安全监测参数选择[J].低温建筑技术,2014(9):46- 49.
猜你喜欢
中国海上油气(2021年2期)2021-06-09 08:13:48
新世纪智能(高一语文)(2020年9期)2021-01-04 00:42:52
海洋工程装备与技术(2020年2期)2020-07-13 07:08:18
天津大学学报(自然科学与工程技术版)(2019年1期)2019-12-21 09:03:36
建材发展导向(2019年11期)2019-08-24 06:35:16
中华诗词(2018年4期)2018-08-17 08:04:12
宝藏(2017年6期)2017-07-20 10:01:02
宝藏(2017年6期)2017-07-20 10:01:01
舰船科学技术(2016年1期)2016-02-27 15:39:24
Beijing Review(2015年43期)2015-11-25 03:12:04
