航母编队航渡时反潜巡逻机前方反潜防护搜索方法及其效能评估
2018-03-01 01:42:22丛红日
海军航空大学学报 2018年6期
丛红日,金 添,褚 政
(海军航空大学,山东烟台264001)
航母编队是当今海军最重要的兵力之一,在航母编队航渡过程中,通常会面临来自敌潜艇的严重威胁。为此,航渡中的航母编队需要建立由多种反潜兵力共同构建的完整反潜防御体系,以应对敌潜艇的威胁[1]。其中,反潜巡逻机是建立航母编队反潜防御体系的主要兵力之一[2],其作战效能的发挥,对航母编队的对潜防御有重要影响。对于航渡中的航母编队,其前方和侧前方通常是敌潜艇(尤其是常规潜艇)威胁的主要方向[3],反潜巡逻机通常配置在航母编队航向的前方或侧前方进行搜索警戒。因此,研究航母编队航渡过程中反潜巡逻机前方反潜防护搜索方法,并对其搜索效能进行仿真评估,对于指导航母编队的反潜防御,确保航母编队的对潜防御安全具有重要意义。
1 航母编队航渡时反潜巡逻机使用声呐浮标搜潜方法
航母编队航渡至敌方潜艇重点威胁海区时,通常由反潜巡逻机与核动力攻击潜艇协同建立外层反潜防护区。根据反潜巡逻机的性能特点以及航母编队航渡过程中的反潜防御需要,通常在航母编队航向前方一定距离上配置2架反潜巡逻机,建立前方反潜防护搜索区进行反潜巡逻警戒[4]。
1.1 基本搜索方式及其主要任务
反潜巡逻机可以使用机载搜索雷达或红外探测仪等搜索设备进行大面积警戒搜索,以发现处于水面、半潜或通气管状态或使用潜望镜进行观察的敌潜艇。但敌潜艇一般处于水下航行状态[5],对于反潜巡逻机来说,声呐浮标是其搜索发现水下航行状态敌潜艇的主要搜索器材。因此,反潜巡逻机通常使用声呐浮标在反潜防护搜索区设置声呐浮标阵,对敌潜艇进行搜索警戒。这种方法是反潜巡逻机为航渡中的航母编队提供反潜防护的主要搜索方法,称之为基本搜索方式,如图1所示。此外,反潜巡逻机还可以根据需要参与应召搜索。

图1 反潜巡逻机使用声呐浮标在航母编队前方搜索警戒示意图Fig.1 Anti-submarine patrol aircrafts use sonar buoys to search for warning sketches in front of aircraft carrier formation
采用基本搜索方式主要解决2方面的问题:一是搜索发现并进而阻止敌潜艇穿越设置的反潜防护搜索区(这种情况我们称之为穿越搜索区),从而接近我航母编队并对我航母编队构成威胁;二是搜索发现并进而阻止敌潜艇占领导弹攻击阵位(这种情况我们称之为占领导弹攻击阵位),并发射潜射反舰导弹攻击我航母编队,威胁我航母编队的安全。为此,反潜巡逻机的反潜搜索区一般应设置在敌潜艇可能的导弹攻击阵位区域。
对于基本搜索方式来讲,除我反潜巡逻机的性能、敌潜艇噪声特性及其作战使用以及海战场环境等客观因素外[6],主要有2方面的因素影响作战使用效果:一是反潜防护搜索区的位置及其大小[7];二是如何合理布设、监听声呐浮标阵[8]。
1.2 反潜防护搜索区的位置及其大小
1)反潜防护搜索区的位置。反潜巡逻机主要负责外层反潜防御区的对潜警戒,一般在我航母编队航向前方一定距离上设置反潜防护搜索区,该距离称为前出距离D前出,主要根据2方面因素确定:一是反潜巡逻机所在外层反潜防护区与相邻的中层反潜防护区之间的协同要求[9],从而保证整个航母编队反潜防御体系的完整性和有效性;二是阻止敌潜艇占领导弹攻击阵位。综合考虑以上2方面的因素,并参考美军经验,前出距离D前出一般为100km至200km为宜。
2)反潜防护搜索区的大小。采用基本搜索方式为航渡中的航母编队进行护航反潜搜索时,需要合理确定反潜防护搜索区的范围(即大小)。通常情况下,为保证航母编队航行安全,反潜巡逻机需结合自身留空时间及航母编队航行速度,布置矩形反潜区域,如图2所示。
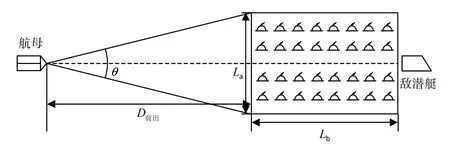
图2 反潜巡逻机搜索区域示意图Fig.2 Search area sketch of anti-submarine patrol aircraft
①搜索区宽边的确定。搜索区宽边是指矩形反潜搜索区垂直于航母编队航向的那条边,其大小(边长)La为反潜防护搜索区的防护宽度,主要取决于敌潜艇的威胁扇面角θ(通常由反潜指挥中心根据判断分析得出)、反潜巡逻机的前出距离D前出,如图2所示。显然:

结合敌潜艇威胁扇面的研究,并参考美军等的经验,搜索区宽边边长La一般为40km至100km为宜。注意的是:一般情况下,反潜防护搜索区通常由2架反潜巡逻机通过区域协同共同建立,如图1所示。对于其中单架反潜巡逻机而言,其所承担的反潜防护搜索区的宽边边长La单为La的一半。即:

②搜索区长边的确定。搜索区长边是指矩形反潜搜索区平行于航母编队航向的那条边。航渡过程中的航母编队处于持续的运动过程之中。因此,搜索区长边的大小(边长)Lb不但能提供反潜防护纵深,而且决定了所能提供的反潜防护时间。
由于航母编队需要长时间进行航渡,因此,在条件许可的情况下,应在尽可能长的时间内为航渡中的航母编队提供反潜防护。反潜巡逻机的反潜防护区使用声呐浮标建立,根据反潜巡逻机使用声呐浮标搜索的特点,其所能提供的反潜防护搜索时间主要取决于声呐浮标阵的最大监听时间T监听。设航母编队在航渡过程中的航速为v航母,则

1.3 声呐浮标阵的布设及其监听
1.3.1 布设与监听声呐浮标阵的方法
使用声呐浮标阵进行搜索,主要包含布设声呐浮标阵与监听声呐浮标阵这2个方面的工作[10],这2方面既相互联系又相对独立。如何处理两者之间的关系,是使用声呐浮标阵搜索时首先需要解决的问题。
主要有边布设边监听和先布设后监听这2种方法[11],其中,最常用的方法为先布设后监听。即首先把声呐浮标阵内的所有声呐浮标全部布设完成后,再集中进行监听。本文采用先布设后监听的方法。
1.3.2 声呐浮标阵阵型
布设声呐浮标阵的基本原则是以尽可能少的声呐浮标,取得尽可能大的搜索效能[12]。为此,需要科学设计声呐浮标阵的阵型。
声呐浮标阵阵型是指声呐浮标阵内各枚声呐浮标之间的位置关系[13]。结合航母编队航渡时反潜防护的需要,基本阵型为多列拦截型直线浮标阵,具体来说,就是在所确定的反潜防护搜索区内,沿航母编队航向的方向由近至远(以航母编队为基准)依次布设若干道拦截型直线形声呐浮标列,而每列声呐浮标,则是沿垂直于航母编队航向的方向(即平行于反潜防护搜索区宽边的方向)布设。
由于基本搜索方式既要搜索发现穿越搜索防护区的敌潜艇,还要搜索发现占领导弹攻击阵位的敌潜艇,这两者之间并不完全一致。因此,一般情况下,需要综合这2种情况来科学布设声呐浮标阵。但同一声呐浮标阵,在这2种情况下其搜索效能并不相同。因此,实际作战使用时,应根据所承担的主要任务是阻止敌潜艇穿越搜索区还是阻止敌潜艇占领导弹攻击阵位,来科学确定声呐浮标阵。一般情况下,应优先考虑阻止敌潜艇穿越搜索区。以下就以这种情况为例来讨论如何科学布设声呐浮标阵。
1)直线形声呐浮标列内左右间距的确定。每道声呐浮标列内左右间隔距离La间隔主要取决于声呐浮标的有效探测距离d浮标[14],为了保证足够的搜索效能,相邻声呐浮标之间的间距应小于2倍d浮标。实际使用时,单列浮标阵中相邻浮标之间的距离通常取1.8倍的d浮标。
2)相邻声呐浮标列间距的确定。阻止敌潜艇穿越搜索区和阻止敌潜艇占领导弹攻击阵位,这2种不同的任务,相邻各列声呐浮标之间距的确定有所不同。
①敌潜艇穿越搜索区时。声呐浮标阵布设完成后,需要长时间对声呐浮标阵进行监听,以搜索发现敌潜艇。对于敌潜艇穿越所设定的反潜防护搜索区的情况而言,在监听声呐浮标阵的过程中,敌潜艇一般从航母编队航向的前方或侧前方相对航母编队航行,即沿航母编队航向大致相反的航向航行,以便迅速接近航母编队,设敌潜艇的航速为v敌潜艇,监听声呐浮标阵的最大监听时间为T监听,则相邻各列声呐浮标之间的间隔距离Lb间隔为

②敌潜艇占领导弹攻击阵位时。而敌潜艇占领导弹攻击阵位时,既可能从航母编队的前方或侧前方进入,又可能从与航母编队航向大致垂直的2个方向进入。因此,为了取得比较好的搜索效能,与敌潜艇穿越搜索区时的情况相比,应大幅缩小相邻声呐浮标列之间的间距,一般情况下,应为声呐浮标有效探测距离d浮标的2至4倍。

1.3.3 布设声呐浮标阵所需声呐浮标数量
反潜防护搜索区的宽边边长和直线形声呐浮标列内相邻声呐浮标的间距确定了,每列声呐浮标所需要的声呐浮标数量就相应能够确定,反潜防护搜索区的长边边长和相邻浮标列的间距确定了,所需要的声呐浮标列的数量也就确定了。综合这2方面的因素,就可以确定布设声呐浮标阵所需声呐浮标的数量:

实际布设声呐浮标阵时,还要考虑反潜巡逻机所携载的声呐浮标数量n携载浮标。如果

则按照所设定的声呐浮标阵布设即可。而如果

则反潜巡逻机所携载的声呐浮标不足以布设所设定的声呐浮标阵,由于反潜巡逻机数量有限,而且为航母编队护航时一般远离机场。因此,一般难以采取多架次接力式布设的方法,此时,一般情况下,应视情增大La间隔或Lb间隔的取值,或者缩小La单或Lb的取值,特别是增大Lb间隔的取值,直至满足式(7)的要求。
1.3.4 声呐浮标阵的监听
训练和作战的实践以及相关研究均表明,声呐浮标阵一旦布设,其搜索效能随着监听时间的增加而增加,或至少不会降低[15]。因此,在可能的情况下,应尽可能增加声呐浮标阵的监听时间,已取得尽可能高的搜索效能。
声呐浮标阵的监听时间T监听主要取决于反潜巡逻机的有效留空时间(即反潜巡逻机能用于监听声呐浮标的留空时间)以及声呐浮标的有效工作时间,一般情况下,反潜巡逻机的留空时间较长,一般能满足监听声呐浮标阵的需要,而声呐浮标的有效工作时间相对有限。因此,正常情况下,声呐浮标阵的监听时间T监听主要取决于声呐浮标的有效工作时间。
结合声呐浮标阵的阵型,监听时,反潜巡逻机一般应采用方形飞行监听或“8”字形飞行监听的方法进行监听,即反潜巡逻机在所布设的声呐浮标阵上空以一定的飞行高度和飞行速度沿方形或“8”字形飞行路径飞行,同时进行监听。
2 搜索效能模型
2.1 搜索效能指标
对于反潜巡逻机为航渡中的航母编队进行反潜防护搜索,最重要的是能够搜索发现进入到搜索区的敌潜艇[16]。因此,核心搜索效能指标为搜索概率,即在布设了声呐浮标阵的反潜防护搜索区内,如果有敌潜艇活动,则能够通过监听声呐浮标阵搜索发现敌潜艇的概率。
2.2 搜索机理分析
由于采用先布设后监听的方法,反潜巡逻机布设完声呐浮标阵后,开始以一定方法对所布设的声呐浮标阵进行监听,通过监听搜索发现敌潜艇。根据声呐浮标阵的工作原理,当敌潜艇进入到组成声呐浮标阵的任意一枚声呐浮标的有效探测范围时,就认为搜索到了敌潜艇[17]。在监听声呐浮标阵的过程中,敌潜艇一般处于持续的运动过程中[18]。因此,在监听时间内,只要敌潜艇的航行轨迹经过了声呐浮标阵内任意一枚声呐浮标的有效搜索范围,如图3所示,则认为搜索到了敌潜艇。
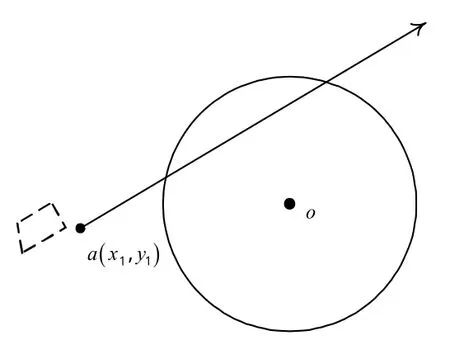
图3 声呐浮标搜潜机理示意图Fig.3 Diagrammatic sketch of Sonar buoy searching submarine Mechanism
2.3 敌潜艇运动模型
敌潜艇通常按固定航线航行,也就是说,在一定时间内,敌潜艇的航向、航速均保持不变。设敌潜艇在任意时刻的位置坐标为(x,y),敌潜艇在初始时刻(即刚开始监听声呐浮标阵的时刻)的位置坐标为(x0,y0),敌潜艇航行时间为t,敌潜艇的航向角为β,在不考虑敌潜艇航行深度的前提下,敌潜艇的运动可用二维平面坐标表示,如图4所示。
则敌潜艇运动方程为:

敌潜艇的航速v敌潜艇虽然未知但可以根据所掌握的情况进行合理假定。而敌潜艇的初始位置坐标(x0,y0)以及敌潜艇的航向角β是未知的,且服从某种概率分布。
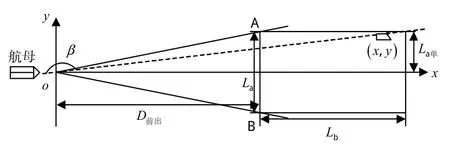
图4 敌潜艇二维空间坐标表示Fig.4 Enemy submarine two-dimensional space coordinate map
1)敌潜艇的初始位置分布,按照搜索效能仿真的需要,必须假定敌潜艇在所设定的反潜防护搜索区内。否则,就无法进行搜索效能仿真。敌潜艇的初始位置虽然是未知的,但一般认为服从均匀分布,设ξ1和ξ2为2个相互独立的服从均匀分布的随机数,且0≤ξ1≤1,0≤ξ2≤1,则敌潜艇的初始位置坐标(x0,y0)可表示为:

2)敌潜艇的航向分布。敌潜艇的航向分布与敌潜艇的意图密切相关,在穿越搜索区和占领导弹攻击阵位这2种情况下,敌潜艇的航向分布是不同的。
①敌潜艇穿越搜索区时的航向分布。当敌潜艇穿越所设定的反潜防护搜索区时,敌潜艇朝着我航母编队的方向航行,敌潜艇的初始位置一旦确定,则敌潜艇的航向角β就相应确定:

②敌潜艇占领导弹攻击阵位时的航向分布。敌潜艇占领导弹攻击阵位时,既可从与我航母编队航向大致相反的方向进入,又可从2个侧向进入,如图5所示。
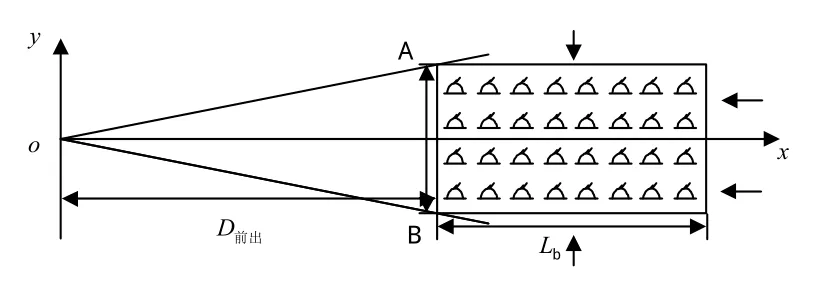
图5 敌潜艇占领导弹攻击阵位时的航向分布示意图Fig.5 Direction distribution diagram of submarine occupying missile attack position
在这180°的角度范围内,可以认为敌潜艇的航向服从均匀分布。设ξ3为服从均匀分布的随机数,且0≤ξ3≤1,则

3 搜索效能仿真分析
3.1 想定条件
某年某月某日,我航母编队在某海域航行,经判断,该海域有敌潜艇活动,对我航母编队安全构成重大威胁,为此,出动反潜巡逻机采用基本搜索方式为航渡中的航母编队进行反潜防护搜索。
我航母编队的航行速度v航母为××kn。
反潜巡逻机在航母编队航向前方建立反潜防护搜索区,搜索区距离航母编队的距离D前出为××km。
根据战场态势和敌情威胁分析,所设定的反潜防护搜索区的搜索防护宽度(即搜索区宽边边长La)为××km,出动2架反潜巡逻机通过上文所述的区域协同方法进行协同搜索,相应地,每架反潜巡逻机搜索区宽边边长La单为××km。
我反潜巡逻机在所设定的反潜防护搜索区内使用某型号被动全向声呐浮标按上述的方法布设声呐浮标阵进行搜索,该型号声呐浮标的有效作用距离d浮标为××km。监听声呐浮标阵的总时间T监听为××h。
经分析判断,敌潜艇为××型号常规动力潜艇,其航速v敌潜艇为××kn。
为了进行仿真分析,设定2个仿真变量:一是声呐浮标阵内相邻2列声呐浮标之间的间距Lb间隔分别按式(4)和式(5)进行设定,在想定条件下,Lb间隔的取值分别为37.5 km和4 km;二是敌潜艇的意图不同,分别是穿越搜索区和占领导弹攻击阵位这2种情况,在这2种不同情况下,如上文所述,敌潜艇的航向分布不同,在其他条件相同的情况下,搜索效能也不同。这2方面的因素进行组合,相应地,就有4种仿真想定,如表1所示。
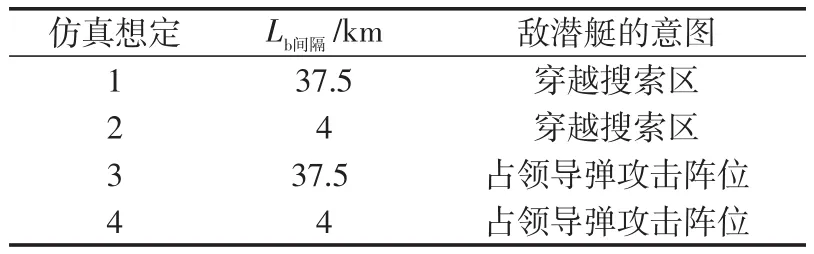
表1 仿真想定Tab.1 Simulation scenario
3.2 搜索效能仿真
使用蒙特卡洛法对搜索效能进行仿真。设搜索效能为P,仿真次数为N,搜索发现敌潜艇的次数为M,则

使用Matlab编写仿真程序进行搜索效能仿真。仿真结果如图6所示。图6中所示的4种仿真结果,分别为上文所述的4种仿真想定条件下的仿真结果。
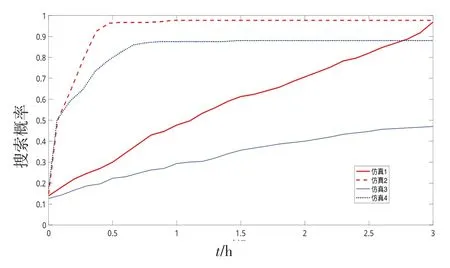
图6 仿真结果Fig.6 Simulation result
3.3 仿真结果分析
从仿真结果可以看出,本文所提的作战使用方法能够取得较高的搜索效能,证明了所提出作战使用方法的合理性和有效性。此外,通过对仿真结果进行分析,可以得出能够对指导作战使用有益的结论或启示。
从仿真结果可以看出,随着监听时间的增加,无论在哪种仿真想定条件下,搜索效能均不断提高或至少不降低。也就是说,搜索效能是监听时间的单调递增函数。但在不同情况下,其影响是不同的:当相邻声呐浮标列之间的间距较小(即声呐浮标阵内声呐浮标的密度较大)时,无论敌潜艇是穿越搜索区还是占领导弹攻击阵位,当监听时间超过某一数值时(分别大约为35min和45min)时,再增加监听时间,搜索效能基本不再提高。因此,如果声呐浮标阵密度足够大(相应地,所需要的声呐浮标数量增加),那么,用较少的监听时间就能取得较好的搜索效果;而当相邻声呐浮标列之间的间距较大(即声呐浮标阵内声呐浮标的密度较小,所需要的声呐浮标数量也较少)时,无论敌潜艇是穿越搜索区还是占领导弹攻击阵位,随着监听时间的增加,搜索效能持续提高。因此,为了能保证一定的搜索效能,声呐浮标数量与监听时间之间存在着负相关关系,即:如果使用较少的声呐浮标,则需要增加监听时间,而如果要减少监听时间,则需要使用较多的声呐浮标。
另一方面,敌潜艇的意图(也就决定了其活动规律)对搜索效能有显著影响:当敌潜艇意图穿越搜索区时,虽然相邻浮标列之间的间距对搜索效能有一定影响,但只要监听时间足够长,就能取得较为理想的搜索效能;而当敌潜艇意图占领导弹攻击阵位时,当相邻浮标列之间的间距较小时,能够取得较高的搜索效能,而如果相邻浮标列之间的间距较大,则搜索效能较低,难以对敌潜艇有效进行搜索,因此,为了保证足够的搜索效能,必须增加声呐浮标阵内声呐浮标的密度,或者采用更加科学的阵型。因此,在反潜巡逻机为航渡中的航母编队进行反潜防护搜索时,应尽可能准确地对敌潜艇的意图进行分析判断,从而有针对性地制定作战使用方案。
4 结束语
结合航渡中航母编队反潜防护的特点和要求以及反潜巡逻机使用声呐浮标搜索的作战使用特点,研究提出了反潜巡逻机使用声呐浮标为航渡中的航母编队进行反潜防护搜索的作战使用方法,并使用蒙特卡洛法在想定条件下对所提出的作战使用方法的搜索效能进行了仿真研究,进而通过仿真结果的分析,提出了对作战使用具有指导意义的意见建议。对于指导反潜巡逻机支援航母编队反潜的训练和作战使用,提供了理论依据和重要参考。
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
家庭影院技术(2020年6期)2020-07-27 01:37:58
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
现代防御技术(2019年1期)2019-03-12 02:35:14
数字海洋与水下攻防(2018年2期)2018-11-08 01:01:42
无人机(2018年6期)2018-09-10 02:09:40
无人机(2017年10期)2017-07-06 03:04:38
电子制作(2017年20期)2017-04-26 06:58:02
海军航空大学学报(2015年3期)2015-11-11 17:18:49