滚球控制系统的设计
2018-02-25 14:27刘宝民方士博赵海博耿春丽
电子技术与软件工程 2018年12期
关键词:STM32单片机
刘宝民 方士博 赵海博 耿春丽
摘要 滚球控制系统以stm32单片机为主控模块,使用oled显示屏显示当前数据参数,使用openmv摄像头观察小球的运动,并将小球的实时位置传回主控,然后主控给予指令,舵机结合PD算法进行工作,使白板倾斜,从而让小球达到主控给定的位置。
【关键词】stm32单片机 openmv摄像头 舵机PD
随着当前科技电子的进步,逐渐兴起了一批新型电子。文献[1]进行了模糊控制和传统的PD和PID算法的研究;文献[2]研究了解耦自适应模糊多层滑模控制方法能够有效解决非线性系统的不确定性、强耦合和外部干扰等问题;文献[3]对视觉的板球控制系统进行研究,并取得了很好的控制效果。
基于2017年全国大学生电子设计竞赛的滚球控制系统的设计要求,该设计不仅可以调动大学生学习电子知识的积极性,而且可以普遍提高人们对电子商业的重视,还可以补充大学生动手实践能力不足的缺陷,最重要的是能够让大学生认识到团队的重要性,培养团队协作的意识。
1 系统总体设计
本系统首先给单片机一个指令,如将小球运动到白板某一位置,然后openmv摄像头锁定这个位置,再将这个位置返回给主控,主控给舵机指令,舵机运动,使小球运动,同时,PD算法也运行起来,使小球不会掉下白板,并最终稳定的停在指定位置。本系统经过软硬件实际调试之后,能够实现基本目标。
2 系统结构
2.1 系统机械结构
系统的底层支架是一块大木板,白板在木板的上15cm处,白板正中央由一支碳素杆加一个万向轮固定,一个舵机固定在碳素杆的左方(定为x轴),一个位于第一个舵机和万向轮的垂直平分线上(定为y轴),openmv摄像头固定在空心的铁棒上,距离白板大约60cm,下面用两根铁棒固定在木板上,按键、单片机和oled显示屏固定在木板上。
2.2 系统硬件结构
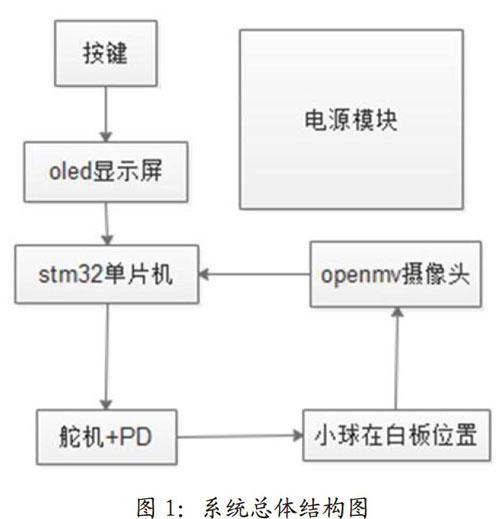
本文涉及的滚球控制系统包括单片机控制模块、openmv摄像头模块、显示模块、按键、舵机模块、电源模块等组成。如图1所示。
2.2.1 单片机控制模块
基于ARM系列32位stm32f103zet6单片机,此单片机功耗小,I/O端口速度快,12通道DMA控制器,调试方式简单高效,中断响应速度快、处理效率较高。
2.2.2 摄像头模块
openmv摄像头不止小巧,低功耗,还自带STM32F4的芯片,以致追踪和传送数据非常快速,而且这款摄像头是使用高级语言Python来书写,这使得更容易处理机器视觉算法的复杂输出,他不仅可以进行图像捕获,还可以进行脸部检测,颜色跟踪,QR码读取等。
2.2.3 显示屏
oled显示屏具备有构造简单、响应速度快,图像稳定;亮度高、色彩丰富、分辨率高。对比度高、厚度薄、视角广、反应速度快、可用于挠曲性面板、使用温度范围广,驱动电压低、能耗低等优点。
2.2.4 动作模块
舵机可以根据你的指令旋转到任意的角度并精准的停下来,反应快,扭力大,具有较强的过载能力,控制精度高,运转非常平稳,并具有共振抑制作用,可涵盖机械的刚性不足,便于系统调整,响应速度快。
2.3 系统软件结构
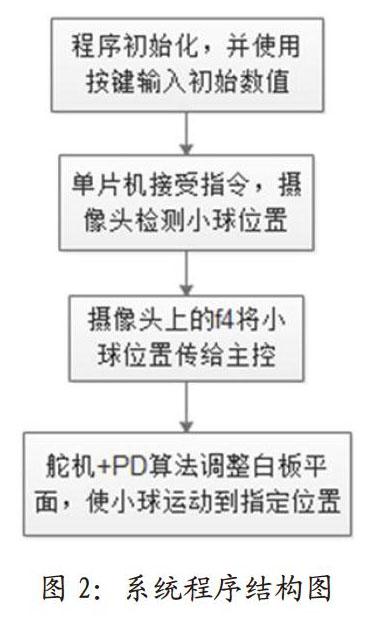
本文主要由初始化程序,oled显示程序,舵机+PD算法,openmv摄像头识别小球的运动程序等构成。如图2所示。
2.3.1 PD算法
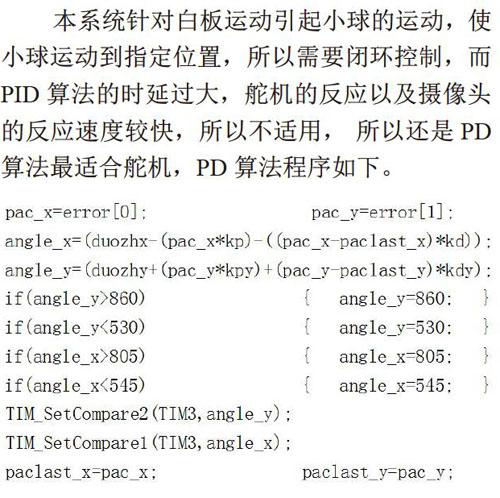
本系統针对白板运动引起小球的运动,使小球运动到指定位置,所以需要闭环控制,而PID算法的时延过大,舵机的反应以及摄像头的反应速度较快,所以不适用,所以还是PD算法最适合舵机,PD算法程序如下。
参考文献
[1]孟廷豪.王忠庆.温志芳,板一球系统的经典控制和模糊控制的研究[J].科技信息.2011 (15).
[2]韩京元.田彦涛.孔英秀.张英慧.李津淞.板球系统自适应解耦滑模控制[J].吉林大学学报,2014 (15).
[3]赵艳花,邵鸿翔,基于视觉的板球控制系统研究[J].自动化技术与应用,2011(25).
[4]王赓.孙政顺.板球控制系统的PD型模糊控制算法研究[J].电气传动,2004 (20).
猜你喜欢
科技资讯(2017年3期)2017-03-25
现代电子技术(2014年21期)2014-11-07