
序列影像三维信息模型技术在隧道巡检中的应用
2018-02-22 01:57吕颖钊
交通科学与工程 2018年4期
吕颖钊
(杭州市公路管理局,浙江 杭州 310004)
调查研究[1-2]表明:相当比例的隧道结构存在裂损、掉块及渗漏水等病害现象,病害的存在会影响交通安全质量,威胁到隧道内行车的安全,缩短隧道的维护周期和使用寿命。目前,隧道巡检仍以人工记录和拍照取样为手段,难以实现隧道巡检信息关联、跟踪及共享,难以及时评估和掌握隧道的技术状态。依托BIM技术,建立了各类隧道养护管理系统,并具备信息三维管理查询的功能[3]。然而,损坏的关联依然依托于设定好的索引。序列影像三维模型技术可以为复杂结构设施建立真实三维空间,通过影像拼贴完成具体病害图片的定位,该技术在建筑测绘和规划等领域得到了一定的证实[4-8]。因此,作者拟依托三维数据平台,建立以数据分析为目的的巡检系统。利用数据分析工具,对序列时空数据进行对比并用于后续分析和辅助决策,以期为隧道巡检提供技术依托。
1 数据采集及处理
本研究通过人工搬站的方式,采集隧道的原始影像数据。具体数据采集流程包括图像拍摄、上传及存储3个环节,如图1所示。
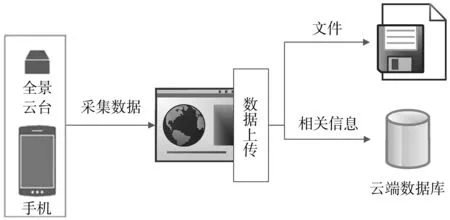
图1 数据采集流程示意Fig.1 The flow of data collection
云端全景云台采集影像的处理流程为:① 影像预处理,包括:影像畸变差校正和图像增强等工序。经过预处理的影像对比度增强,更加清晰,为后续的三维空间点云加密工作提供高质量数据。② 相对定向。将预处理后的影像导入到空间三维处理软件中进行同名点匹配,通过平差后得到相对定向结果。③ 绝对定向。以相对定向结果为基础,通过在影像上添加控制点并进行联合解算,得到绝对定向后的结果。④ 生成密集点云。以绝对定向后的结果为基础进行点云加密处理,得到高密度、高精度的密集点云数据。经过处理后的每张影像将会被赋予真实的三维空间位置和姿态信息,每个匹配点均拥有真实的三维坐标信息,每张照片上的每个像素都对应有真实的地理坐标位置。⑤ 输出成果数据。将处理后的影像、绝对定向后的密集点云根据实际应用需求输出或转换为指定格式存档。
2 建立隧道模型的试验
2.1 隧道模型的建立
鉴于隧道影像的纹理较弱,隧道内亮度较低,传统的基于影像的匹配算法并不适应于隧道场景的影像拼接,因此,本研究提出一种基于严格数学推导曲面投影拼图的方法。采用隧道的网格化和纹理信息,通过曲面投影、坐标转换及纹理重采样等过程,生成一个无缝拼接的隧道拼图。具体步骤为:① 根据所提供的网格数据拟合并建立投影面,用一个与隧道轴向共线的圆柱作为投影面。② 根据计算的投影面,将网格投影到所计算的投影面上,得到投影面网格。对投影面上的数据进行旋转处理,使每一段隧道的轴向都与z轴重合,严格保证此数学关系对于实现影像的无缝拼接有很重要的影响,得到竖直后的网格。③ 定义像平面坐标系,实现数值后投影面和像平面坐标的网格转换,得到平面网格。④ 影像数据重采样,计算平面网格中的每个三角面片在二维平面坐标和纹理影像上3个顶点对应的纹理坐标所组成的三角形的仿射变换矩阵T(T为一个2行3列矩阵)。根据平面网格上每一个三角面片的最小外包矩形,确定搜索区域,在这个区域对每一个像素进行重采样。
本次试验对象为岳山北隧道进口K27+110~K27+205段,长约95 m。采用全景云台进行数据采集,共布置摄站30个,采集影像240张,建立的三维模型效果分别如图2~5所示。

图2 点云数据Fig.2 Point cloud data

图3 线框图Fig.3 Wire frame
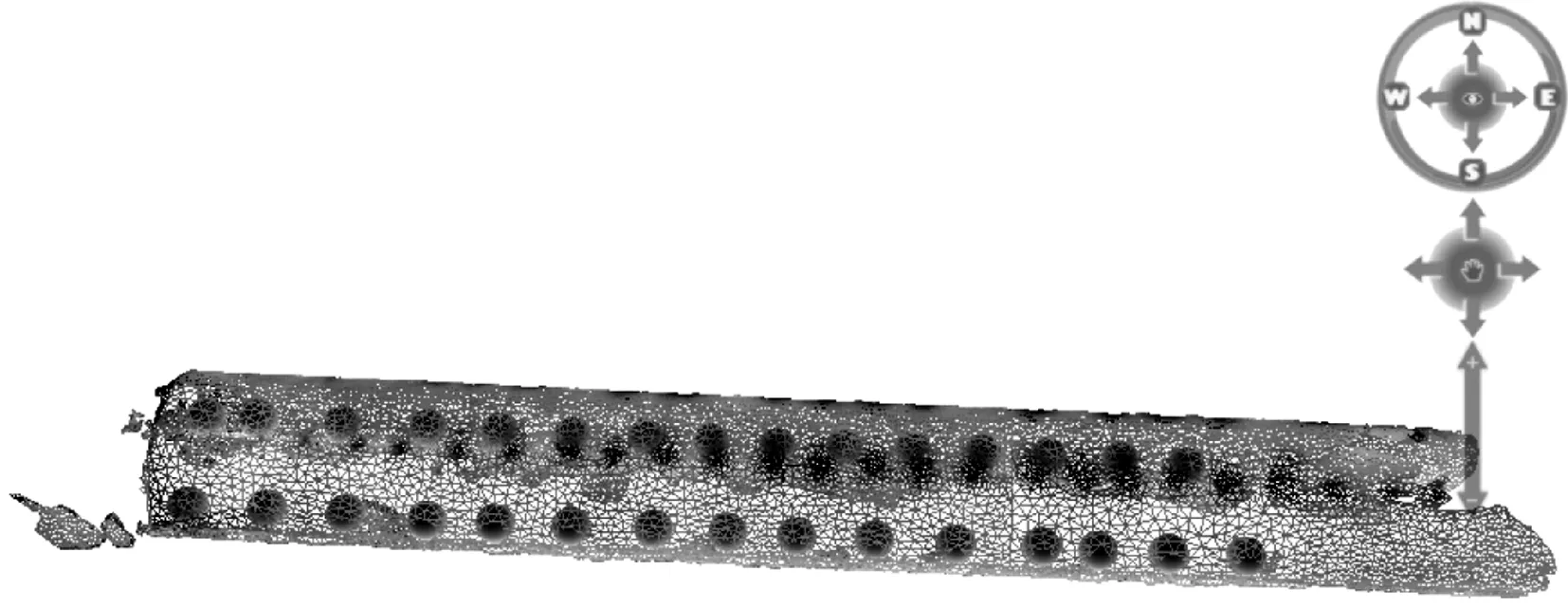
图4 线框图及影像拍摄位置(灰色球体)Fig.4 Wireframe & image location

图5 隧道模型和单张影像Fig.5 The model of the tunnel and one local image
2.2 基于三维模型空间的巡检结果
2.2.1 病害严重程度判别及量化方法
隧道内病害裂缝包括线性裂缝和块状裂缝2大类,可以用外接矩形长短边来量化2类裂缝各自的损坏量。鉴于裂缝形态特征,并不存在一个绝对的裂缝宽度,只存在最大宽度和平均宽度。因此,将裂缝的统计长度定义为当量裂缝长度CL。通过统计目标像素数量,获得裂缝损坏的计算面积Cs,定义裂缝当量宽度Cw,Cw=KCs/CL(其中:K为折减系数,用于去除实际计算中的目标噪声)。设初步设定线裂折减系数为1,网裂折减系数为2,参考示范图像进行计算。
线性裂缝损坏实际长度同当量长度,网状裂缝计算损坏面积为实际损坏像素所占面积,实际损坏面积则为损坏外接多边形的面积,损坏当量长度为实际多边形中裂缝骨架所占像素,损坏严重程度用当量宽度表征。针对网裂损坏严重程度的识别则有待进一步研究,确定合适的量化指标。
各指标计算流程如图6所示,图像增强分割效果分别如图7,8所示。
2.2.2 病害计算结果
选取相对数据较为完整的岳山北隧道拍摄所得部分高清图像为例,进行批量处理,获得裂缝病害的全部信息,包括:4处网裂损坏,共计50.4 m2,裂缝当量宽度分别为0.63,0.69,0.70和0.99 mm;共识别出24处线裂病害,共计121.12 m,平均宽度0.15 mm。局部裂缝损坏识别情况标注如图9所示。
2.3 病害人工检查结果
实验段隧道衬砌裂缝共计26条,裂缝长度累计153.20 m;网裂4处,总面积计49 m2。局部调查结果如图10所示。

图6 计算流程Fig.6 Calculation flow

图7 病害图片Fig.7 Damage images

图8 图像分割结果Fig.8 Image segmentation result

图9 衬砌混凝土竖向、纵向裂缝Fig.9 Transverse and longitudinal cracks of the lining concrete
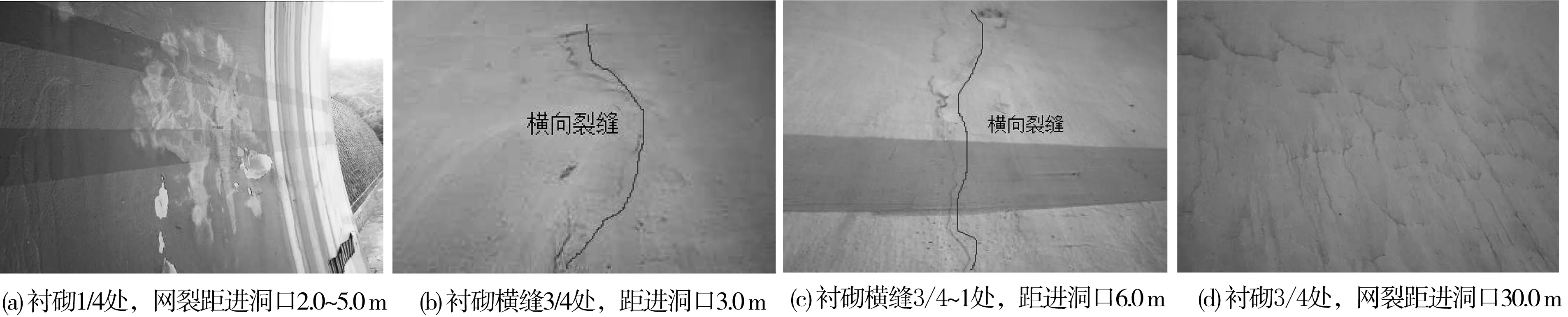
图10 人工巡检病害图片Fig.10 Damage image by a manual survey
2.4 检查结果对比分析
自动化损坏结果与人工调查结果的对比见表1。
从表1中可以看出,线性裂缝识别率达到92.3%,块状裂缝识别率100%。表明:本检测系统具备检测0.1 mm宽度裂缝的能力,实际应用中取决于巡检设备拍摄的图像质量和分辨率。微裂缝损坏识别要求拍摄相机分辨率在2个方向上均达到0.1 mm/像素。在拍摄环境良好的情况下,可适当降低一个方向上的分辨率,采用亚像素技术达到同等精度要求。裂缝深度方面,图像识别不具备深度识别的能力,但可以通过宽度及严重程度进行预估,这需要依赖于更多的数据进行学习判断。
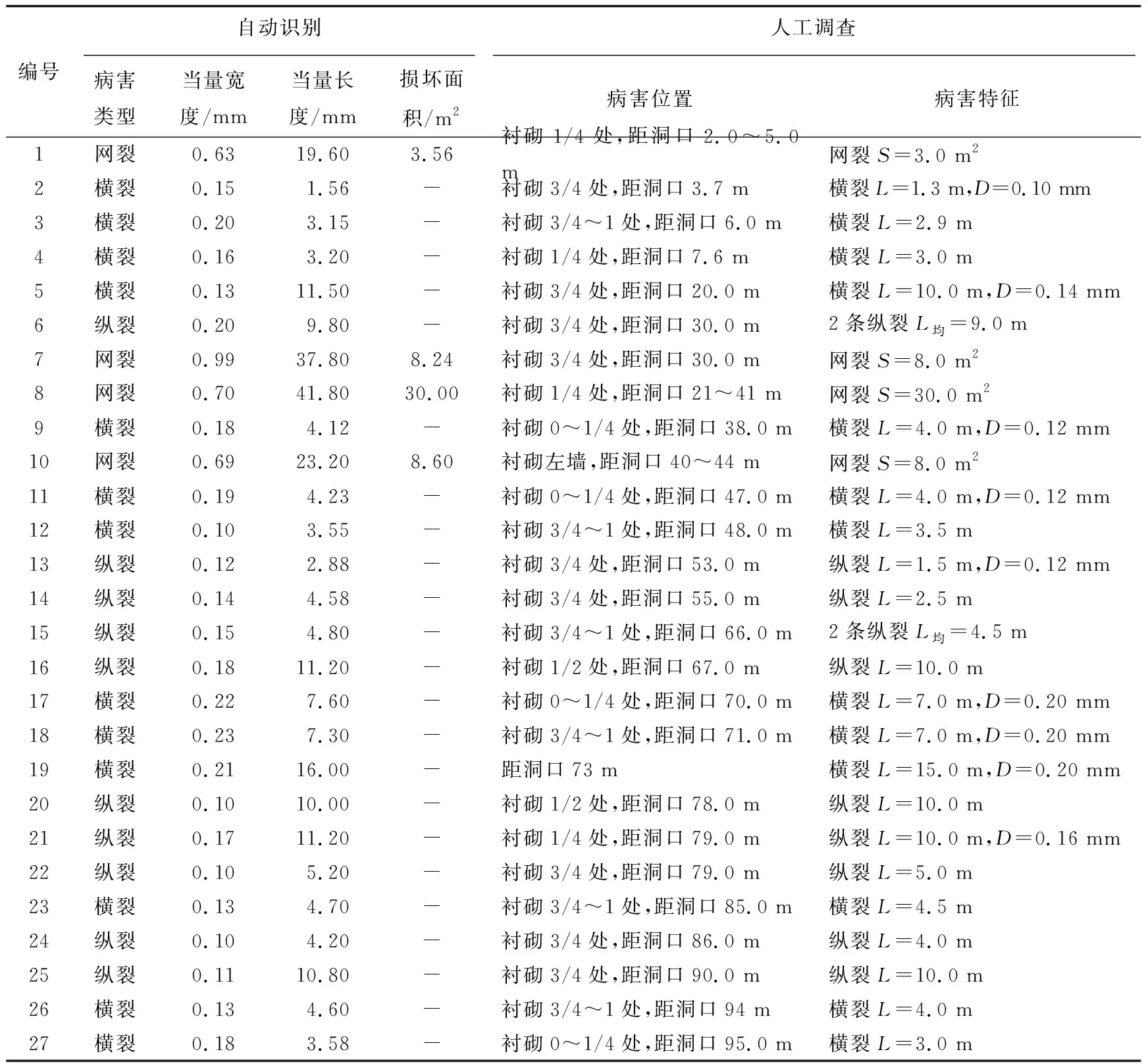
表1 隧道衬砌裂缝损坏检测结果对比表Table 1 Comparison of crack detection results for tunnel lining
注:横向裂缝简称横裂,纵向裂缝简称纵裂,网状裂缝简称网裂。
损坏位置匹配方面,岳山北隧道的大部分数据在虚拟三维空间中匹配效果良好。分析未识别出的线性裂缝损坏,当2条裂缝距离较近或相连的情况时,识别算法往往只能识别出其中一条,或裂缝长度产生较大出入。为此,全景云台摄站间距设置为3 m较为合理,每个拍摄站采集8张照片可以满足三维模型建立的需求。但是,针对具体损坏密度较高的位置,需增加图像数据的采集,以提高分析精度。
初步确定了预处理、图像增强、图像形态学分割及裂缝识别与细化等处理算法的可行性。通过对图像数据目标像素进行定义,确定了裂缝损坏量和发展程度的方法可以用于损坏计算。其中,折减系数是一个与算法数据采集方法相关的系数,其取值需通过更多不同程度的裂缝损坏数据进一步确定。
3 结论
基于序列影像三维建模技术应用于隧道巡检的研究,得到的结论为:
1)三维空间模型建立应采用隧道的网格和纹理信息,通过曲面投影、坐标转换及纹理重采样等过程生成一个无缝拼接的隧道拼图。
2)针对具体病害,得到定位和识别。当拍摄隧道混凝土表面存在的细微病害(如:裂缝)时,应采用由远及近的拍摄方法,远距离拍摄一张影像用于定向,近距离拍摄病害的细节。
3)通过示范项目试验分析,采集数据满足解析和模型要求,其病害巡检精度可满足设施巡检要求,即检测出0.1 mm的裂缝。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
现代职业教育·高职高专(2020年3期)2020-08-16
红领巾·萌芽(2019年8期)2019-08-27
中国与非洲(法文版)(2017年10期)2017-11-23
CHIP新电脑(2016年3期)2016-03-10
建筑工程技术与设计(2015年19期)2015-10-21
医学研究杂志(2015年5期)2015-06-10
人生十六七(2015年5期)2015-02-28
中国教育技术装备(2014年20期)2014-04-28
科技视界(2012年8期)2012-08-15
