并联混合动力汽车工况识别与参数优化
2018-02-20 05:32
安徽工业大学学报(自然科学版) 2018年3期
(安徽工业大学机械工程学院,安徽马鞍山243032)
混合动力汽车(hybrid electric vehicle,HEV)凭借续驶里程长、动力性能好等优势成为当前新能源汽车发展主要方向。混合动力汽车具有两个及以上的动力源,但不同动力源间动态特性存在差异,故作为协调能量分配的能量管理策略是整车控制系统的核心,也是实现整车节能减排的关键。目前,对混合动力汽车能量管理策略的研究取得了诸多有益的成果。国内外同行将能量管理策略主要分为基于规则[1-3]和基于优化[4-6]两大类,这两类能量管理策略能有效优化混合动力汽车的燃油经济、排放与动力性能,但对于复杂工况,难以根据工况特点实时在线调整控制参数以实现最优控制。考虑到车辆驾驶循环的影响,若能够根据行驶工况特征来划分特定的工况类型,并在车辆行驶时根据特定工况的识别结果来分配发动机与电机间功率或能量,则可在一定程度上实现燃油经济性的提升。鉴于此,有学者提出基于行驶工况的能量管理策略,如文献[7]结合动态规划及模糊控制理论建立了工况模糊识别器;文献[8]采用BP神经网络及学习向量量化(learning vector quantization,LVQ)神经网络对特定工况进行识别。模糊控制和基于神经网络的工况识别方法虽能有效识别工况,但需前期制定规则及神经网络训练等,工作量较大。K均值聚类算法是一种典型的基于划分的聚类方法,因其算法简单且收敛速度快,在数据挖掘、图像分割、模式识别、特征提取等领域[9]获得广泛应用。
基于此,以某型并联混合动力汽车(parallel hybrid electric vehicle,PHEV)为研究对象,针对模糊控制、BP神经网络以及LVQ神经网络等工况识别方法存在的局限性,提出一种基于K均值聚类的工况识别方法,利用K均值聚类算法进行工况识别,建立各子系统动力学模型,以整车最低能耗为优化目标,对整车关键控制参数离线优化,获得不同典型工况下动力源间功率分配比例,实现PHEV行驶工况识别与最优能量分配。
1 PHEV动力总成分析与建模
如图1所示文中研究的并联混合动力汽车动力总成结构主要由整车控制器、发动机及其控制器(engine control unit,ECU)、集成启动电机(integrated starter generator,ISG)及其控制器、离合器、变速器、动力电池及其管理系统(battery management system,BMS)组成。PHEV具有5种工作模式:纯电动驱动模式、发动机驱动模式、发动机与电机联合驱动模式、再生制动模式以及行车充电模式。

图1 并联混合动力汽车动力总成结构Fig.1 Power assembly structure of PHEV
1.1 发动机模型
在PHEV中,发动机是主要动力源,发动机的燃油消耗特性直接影响整车性能,其燃油消耗率随着发动机转速和载荷增大而增大。通常发动机具有一个最佳的运行区域,此区域内发动机工作效率最高,对应的燃油消耗率最小。发动机油耗计算公式为

式中:me为发动机消耗的燃油量;为发动机燃油消耗率;ne为发动机转速;Te为发动机输出转矩;t0,tf分别为发动机运行的开始、结束时刻。因此,由某时刻发动机转速可知对应的转矩,进而通过发动机稳态特性查表获得该时刻发动机油耗,积分后可求得整个循环工况内发动机油耗。
1.2 电机模型
电机的引入是PHEV降低油耗的关键,发动机与电机间的配合使发动机工作于高效区从而提高整车燃油经济性。电机具有驱动和再生制动两种模式,电机输出功率Pm与转矩Tm表示如下:

式中:Tm>0表示电机处于电驱动模式,Tm<0表示电机处于再生制动模式;nm为电机转速;ηm_drv,ηm_reg分别为电驱动与再生制动模式下的电机运行效率,可由电机稳态特性查表获得;τm为电机转矩响应时间常数;s为电机转矩控制输入变量,Tm_req为电机需求转矩;Tm_max,Tm_min分别为电机最大、最小输出转矩。
1.3 动力电池模型
动力电池是PHEV动力总成中重要的储能元件,这里忽略电池温度对电池荷电状态(state of charge,SoC)及内阻的影响,动力电池充放电过程中等效电路如图2。充、放电过程中电流为:
在充电状态下,电池SoC值表示为

式中:Eoc为电池等效电动势;R-和R+分别为充、放电状态下的等效内阻;Pbat_chg,Pbat_dis分别为电池充、放电功率;SoCinit为初始SoC值;Q0为电池总安时容量;Qchg为充入电池的电量;ηbat_chg为电池充电效率。图2中U为电池端电压。
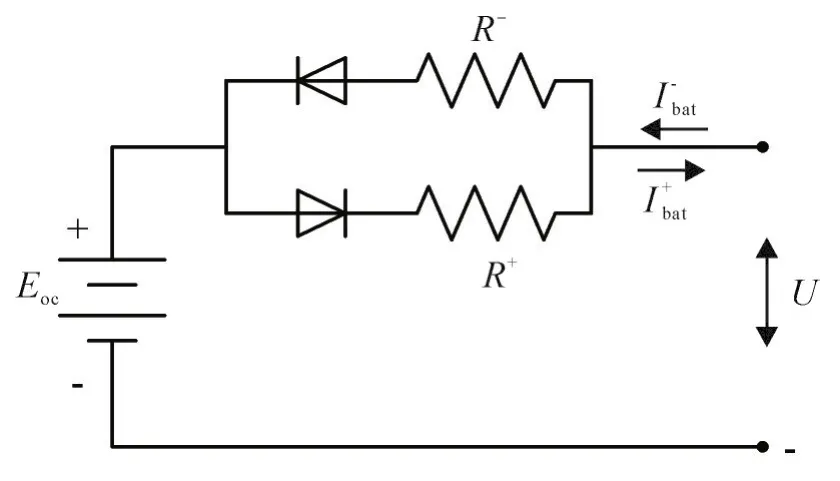
图2 动力电池等效电路模型Fig.2 Equivalent circuit model of power battery
1.4 整车行驶动力学模型
车辆行驶动力学模型暂时只考虑车辆纵向行驶动力学,不涉及车辆垂向振动与行驶时的操纵稳定性,忽略车轮与路面间滑移。为表征整车行驶速度,根据汽车理论,车辆在平直道路上匀速行驶时的受力状态如图3。
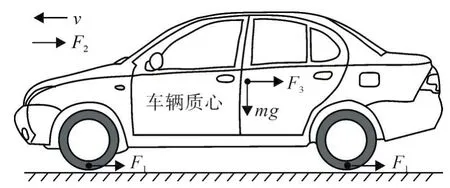
图3 车辆行驶受力示意图Fig.3 Schematic diagram of vehicle driving force
行驶时需克服滚动阻力F1、空气阻力F2及加速阻力F3等作用,整车动力学方程表示为

式中:F为车辆行驶牵引力;m为车辆整备质量;g为重力加速度;f为滚动阻力系数;C为空气阻力系数;A为车辆迎风面积;δ为旋转质量换算系数;v为车辆行驶速度。其中,滚动阻力F1与整车质量及道路状况有关,空气阻力F2与整车迎风面积及车速v有关,加速阻力F3是车辆克服其质量加速度时的惯性力。
2 基于K均值聚类的PHEV行驶工况识别
2.1 工况数据处理及特征参数选取
基础工况应包括低速、高速、频繁启停等,ADVISOR2002车辆仿真软件中代表性工况共24种,这里将车辆行驶工况划分为闹市区、一般城市区、空旷郊区及畅通高速区4种典型工况[10],其中闹市区,因交通拥堵、过多红绿灯等影响车辆停车等待时间较长,车速低;一般城市区,交通较为通畅,无长时间等待情况,车速较低;空旷郊区,车辆车速适中,偶尔停车;畅通高速区,车辆行驶速度较快,无停车等待情况。将24种标准工况首尾随机组合,组合工况如图4。
将构建的组合工况数据划分为长度100 s的短工况片段,参考文献[11],选择车辆行驶的平均车速、平均绝对加速度和怠速时间比3个参数作为工况识别特征参数,3个参数公式计算如下:

图4 组合工况Fig.4 Combined driving cycle

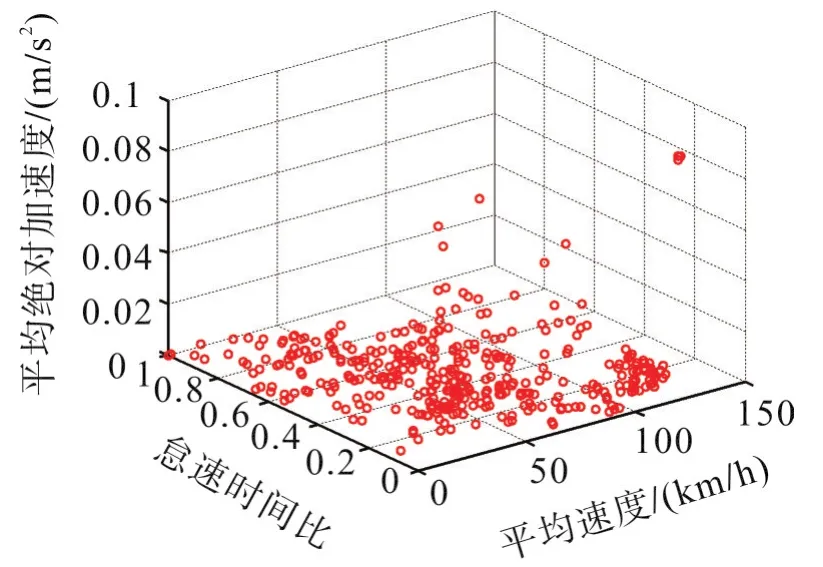
图5 组合工况片段三维散点图Fig.5 Three dimensional scatter diagram of combined driving cycle
2.2 K均值组合工况聚类结果
K均值聚类是一个将相似数据集中并进行组织、分类的过程,属于无监督学习算法,该算法主要流程如图6。首先在原始数据集中随机选取k个对象作为初始聚类中心(文中聚类中心个数为典型行驶工况个数,即4个初始聚类中心),然后计算剩余每个对象与各初始聚类中心间的欧式距离,随后将每个对象分配给距离其最近的聚类中心,这一过程表示如下:

式中:sk为按最近邻原则选取的聚类中心;xi为第i个样本;yj为第j个聚类中心;k为初始聚类中心个数;n为总的样本个数;d(xi,yj)为数据集中样本对象与每一个初始聚类中心的欧氏距离;mind(xi,yj)为选取数据集中样本对象与每一个初始聚类中心的最小欧氏距离。

图6 K均值聚类算法流程Fig.6 Flow of K-means clustering algorithm
在MATLAB中编制K均值聚类程序进行工况聚类,结果见图7。图中对应的工况分别为:聚类结果1表示闹市区,聚类结果2表示一般城市区,聚类结果3表示空旷郊区,聚类结果4表示畅通高速区,4个聚类中心的坐标分别为(11.7081,0.3252,0.0189),(35.1040,0.1103,0.0294),(68.5166,0.0372,0.0244),(100.806 9,0,0.017 6)。

图7 组合工况聚类结果Fig.7 Clustering result of combined driving cycle
3 PHEV工况识别控制策略与参数优化
3.1 基于工况识别的PHEV能量管理策略
基于逻辑门限值的能量管理策略是最早获得实车在线应用的一类HEV能量管理策略,规则清晰、简单,但由于其较为依赖专家经验,难以使HEV获得最佳的燃油经济性。文中以基于逻辑门限值的电量消耗-电量维持型(charge depletion-charge sustaining,CD-CS)控制策略为基础[12],分析PHEV在不同运行模式下的控制规则与运行条件,如表1。分析表1可知:整车在CD模式下具有纯电动与混合驱动两种运行状态,在CS模式下具有纯电动、发动机单独驱动、发动机与电机混合驱动以及行车发电等4种运行模式,此外还包括再生制动模式和转矩分配模式等;CD-CS策略的关键在于确定CS与CD两种模式切换的SoC目标值,此外还需综合考虑在CS模式下的SoC值波动范围以及发动机最佳经济运行范围。

表1 基于规则的PHEV能量管理策略Tab.1_ Energy management strategy of PHEV based on rules
综上分析,需综合考虑CD-CS控制策略中关键参数对整车能耗控制的影响,若仅针对瞬时或单一工况优化控制参数,则面对复杂多变的行驶工况难以获得相对最优的控制效果。因此,考虑行驶工况对车辆能耗与燃油经济性的影响,提出一种基于工况识别与参数优化的PHEV能量管理策略,获得典型工况下的最优控制参数,当车辆行驶于不同工况时,识别当前所属工况,提取所属工况最优控制参数对车辆进行控制。
3.2 PHEV参数优化
PHEV在保证一定动力性的前提下,进一步降低整车能耗的关键在于合理分配发动机与电机两者的功率,故对基于K均值聚类算法识别的4种典型行驶工况的CD-CS控制策略参数进行优化。考虑到PHEV参数较多,这里仅选择对整车能量与燃油经济性影响较大的参数进行优化,选择的参数及优化范围见表2。

表2 待优化参数及取值范围Tab.2_ Optimization parameters and range of value
3.2.1目标函数选取
文中选取行驶工况的整车能耗费用作为优化目标函数,同时考虑4种典型工况下最优CD-CS控制参数的影响,最终的优化目标函数可表示为

式中:E为车辆在整个工况内的能耗;Ee,Em分别为发动机与电机能耗;λe,λm分别为发动机与电机的功率分配权重(不考虑电路损失等因素,理论上λe+λm=1);αe,αm分别为油价与充电电价,且αe=7元/L,αm=1.5 元/(kW·h)。
复杂工况下,混合动力汽车能量管理是一个非线性、时变问题。粒子群优化算法是一种随机搜索算法,对非线性、多变量问题具有较强的全局搜索能力,与遗传算法相比,其没有编码、产生群体、计算适应度、复制、交换变异等繁琐操作,计算简单,步骤简洁[13-14]。因此,采用PSO算法优化混合动力汽车行驶过程中关键参数。
针对优化目标,利用PSO算法分别求出4种典型工况下对应的最优分配权重。对整车燃油经济性有重要影响的关键参数λe与λm,利用PSO算法优化不同工况下的控制参数。PSO优化算法主要参数设置为:经多次离线迭代,选取粒子种群数N=20,最大迭代次数Ωmax=100,学习因子c1=c2=2,惯性权重因子ω的最小值ωmin=0.4,最大值ωmax=0.8。
3.2.2 约束条件
需要满足各动力总成部件性能约束条件

式中:Te_max,Te_min分别为发动机输出转矩上、下限;ne_max,ne_min分别为发动机输出转速上、下限;nm_max,nm_min分别为电机输出转速上、下限;Pm_max,Pm_min分别为电机输出功率上、下限。

表3 参数优化结果Tab.3 Optimization results of parameters
3.2.3 离线优化结果
基于上述工作,参数优化结果如表3,典型工况下发动机与电机的功率分配权重优化结果如表4,能耗优化结果如表5。由表3可看出,各参数优化结果均在给定的优化参数范围内。由表4可看出,从闹市区至畅通高速区,发动机功率权重逐渐增加,对应的电机权重逐渐降低,随着车速增加、怠速时间比的降低,PHEV更倾向于发动机驱动,而在需要频繁启停的场合,则以电机驱动为主。由表5可看出,根据获得的不同工况下发动机与电机间的功率分配权重,得到对应的最小能耗成本,优化后各工况下能耗均有所降低。
综上,基于K均值聚类工况识别策略,通过提取工况特征参数,经聚类获得对应的行驶工况,依据对应典型行驶工况下的发动机与电机功率分配比例来控制对应动力源的输出转矩、功率等,理论上可进一步提升PHEV燃油经济性。
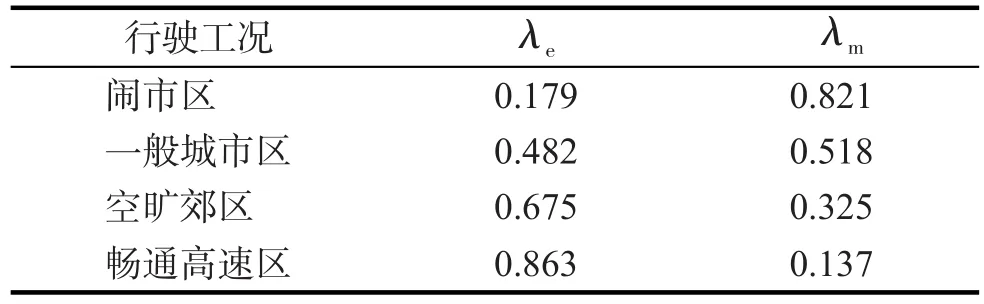
表4 发动机和电机功率分配权重优化结果Tab.4 Optimization results of power distribution weights for engine and motor

表5 能耗优化结果Tab.5 Optimization results of energy consumption
4 仿真验证与分析
为验证基于K均值聚类工况识别策略与参数优化结果的正确性,在MATLAB/Simulink平台上搭建PHEV整车仿真模型,以一段随机工况作为输入,结合工况识别策略与参数优化后的动力源间功率分配权重,分析所提策略的有效性。随机工况如图8,对应的仿真结果如图9~11。
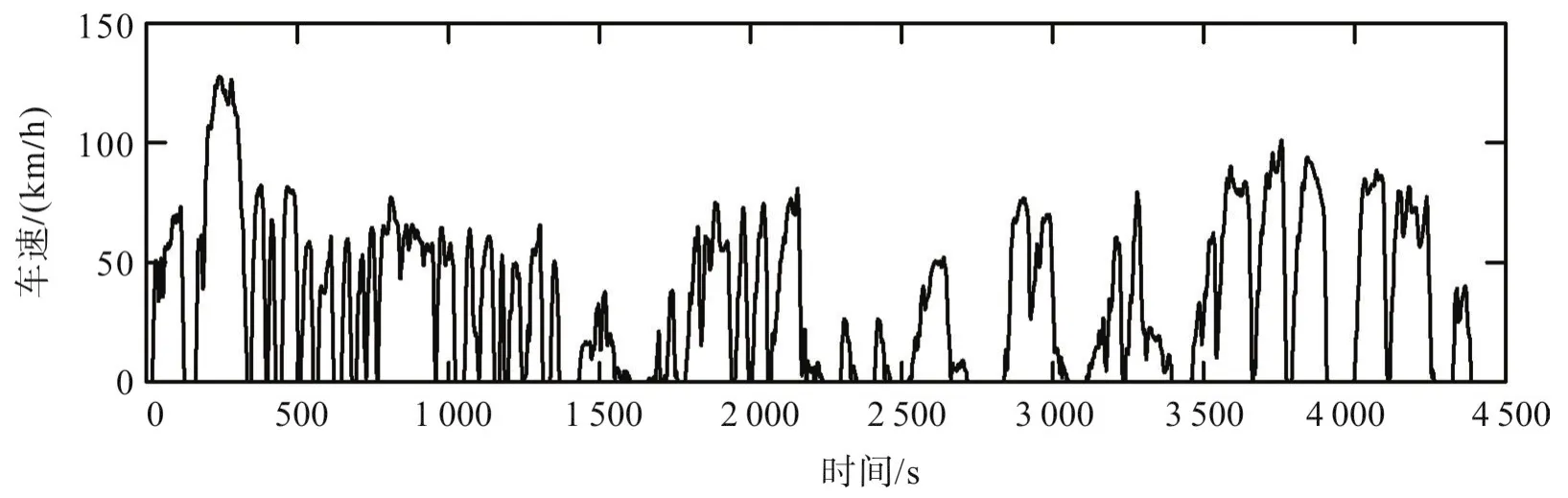
图8 待识别随机工况Fig.8 Stochastic driving cycle to be identified
图9中纵坐标1,2,3,4分别表示闹市区、一般城市区、空旷郊区及畅通高速区4种行驶工况。由图9来看,工况识别模块能够准确提取识别周期内的特征参数,经聚类后得到对应的工况类型并作为PHEV动力源间功率分配的依据。图10为在整个随机工况内车辆动力电池SoC值变化情况,这里设定初始SoC值为0.7。由图10可看出:无工况识别时,SoC值下降速率较大且波动频繁,采用工况识别后,SoC变化趋于平稳,无较大波动,有利于延长电池寿命;相较无工况识别,工况识别后的SoC值下降速率较低,工况结束后电池SoC值约为0.55。图11为工况识别前后发动机、电机输出转矩变化情况。由图11可看出:在1 500,2 500 s前后,工况识别结果为闹市区,此时发动机减小转矩输出,电机相应的增加转矩输出;在随机工况开始及结束的一段时间内,工况类型主要为空旷郊区及畅通高速区,此时发动机增加相应转矩输出,电机降低转矩输出。综上可以看出,有工况识别时,电机与发动机间的功率分配更加合理。表6为随机工况结束后整车燃油消耗情况。由表6可看出,采用工况识别后,整车100 km油耗为5.2 L,相较于无工况识别油耗下降了5.45%,提升了整车燃油经济性。

图11 发动机与电机转矩变化情况Fig.11 Torque variation of engine and motor

表6 燃油消耗情况Tab.6 Comparison of engine fuel consumption
5 结 论
以某型并联混合动力汽车为研究对象,提出一种基于K均值聚类工况识别的能量管理策略与粒子群算法参数优化方法,搭建整车仿真模型对其验证,所得主要结论如下:
1)建立了PHEV动力总成系统各部件模型,采用基于K均值聚类算法识别汽车行驶工况,随机工况仿真结果表明,所提策略能准确提取识别周期内的特征参数,识别结果可作为动力源间功率分配的依据;
2)以整车能耗最小为优化目标,采用粒子群优化算法对逻辑门限控制策略中的关键控制参数进行优化,仿真结果表明,工况识别与参数优化后,SoC值变化平稳,不同工况下动力源间功率分配更加平衡,相较于无工况识别油耗下降了5.45%,提升了整车燃油经济性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
小哥白尼(野生动物)(2021年3期)2021-07-21
消费导刊(2018年10期)2018-08-20
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28