
利用无人机影像进行滑坡地形三维重建的研究
2018-02-14 12:49席远飞石岩张琳先田得港
数字技术与应用 2018年10期
席远飞 石岩 张琳先 田得港
摘要:为了更好的研究地质滑坡相关内容,提出了无人机影像序列滑坡地形全自动三维构建的方法,本文主要研究利用无人机影像进行滑坡地形三维重建的相关内容,首先介绍无人机影像,然后讨论特征点的提取和匹配的相关内容,讨论如何建立运动恢复结构,如何进行相机参数的初步估计,论述试验过程和实验结论。最后分析滑坡地形的三维重建。希望能为关注此话题的研究学者提供参考意见。
关键词:无人机影像;特征点;相机参数
中图分类号:TP751 文献标识码:A 文章编号:1007-9416(2018)10-0000-00
在国内重大的自然灾害时有发生,这会强烈的威胁人类社会经济的发展,也会危及到人们生命财产的安全。滑坡地质灾害有可能是自然因素导致的也有可能是人为因素导致的。地质滑坡灾害危害较大,仅此于地震。而滑坡三维可视化表达对这些研究内容有着十分重要的促进作用。
1 无人机影像
低空无人机的技术支持是材料科学和自动控制工程。在使用的过程中,低空无人机实时性强,动作灵活机敏,而且低空无人机的制作成本较低。它是目前为止能够有效获取地理数据的一项重要手段。在地震灾害时能够发挥关键的作用,用于应急测绘响应、重点区域的及时监测。对卫星遥感有着良好的补充作用,对普通航空摄影测量也有着良好的补充作用。在低空摄影测量研究方面,利用无人机影像进行三维地形的重建是目前的研究热点,此时的低空无人机影像具有较高的分辨率。特征点提取、影像匹配理论、运动恢复结构、多视图立体视觉算法这些技术都归属于计算机视觉领域,目前这些技术已经得到了较高程度的发展,也已经趋于完善。三维影像重建技术是在二维影像的技术基础上发展而来的,如今也已经取得了突破性的进展。
2 特征点的提取和匹配
低空无人机收集到的影像可能有畸变较大的特点,而且个数较多。在提取每一幅特征点的影像时要用到SIFT算子,从开始提取到提取结束,一共需要经过四个步骤,第一步是尺度空间极值测量,然后要做的是精准的定位特征点的位置,接下来要完成的是确定特征点的主方向,最后一个步骤是生成特征点的描述符。再之后要做的是两个影像之间特征点的粗匹配,需要用到SIFT特征集。这一过程需要耗费大量的时间,是整个三维重建算法中花费时间最长的一项工作[1]。无人机非控系统能够提供辅助信息,能准确的判断各个影像之间的重叠关系。要以影像为基础建立出拓扑结构,这样就能简单的获取影像的匹配集合,使得影像匹配的范围得以缩小。在飞控记录中存在着IMU姿态信息,还有GPS位置信息,利用坐标进行转换,将这些信息转变成为每张影像上的6个外方位元素。
3 建立运动恢复结构
以二维影像为依据将摄影机的运用参数和场景恢复成三维的结构信息,这种方法就被称作是运动恢复结构算法,将待求得相机参数假设为C,那么它的集合就是C={C1,C2,…Cn},将空间点坐标假设为X,那么它的集合应该是X={X1,X2,…Xn}。将误差函数假设为重投影误差的平方和。之后要进行逐步迭代的操作,使用的方法是稀疏光束平差法。在投影点和观测图像点之间存在重投影误差,要不断将这一误差做最小化的处理,最终结算出三维点云坐标,这里所说的三维指的是相机的位置、相机所处的场景,以及相机的姿态。运用三维重建算法,在此过程中不需要依赖任何的地面控制点,也不需要依赖连接点,也就是说不需要依赖这些先验的信息,就能够从二维影像中将相机拍摄的位置和场景复位出来,结果呈现的是稀疏的几何结构。
4 相机参数的初步估计
相机的参数包括相机的内部参数和外方位参数。相机先通过SIFT算法在各个航拍图中将特征点提取出来,之后运用POS信息的辅助作用,将全体航图中相互重叠的图像选取出来,进行匹配相对,以匹配关系为依据,将航图划分成若干个板块,这若干个板块称之为若干子块。使用SFM算法将这些子块的相机参数解算出来。然后要从下到上,将各个子块合并起来,采用两两合并的形式。这样所有的航图最终都能合并起来。这种方法被称作是增量迭代。事实上SFM算法在这种大规模的航图解算中会出现误差累计的现象,而使用这种算法就能有效的规避这一不良现象。航图和POS数据能够得到相机参数,之后通过初步的估计,通过特征点的构建,将稀疏点云连接起来。均方重摄影的误差为0.809,这一误差的最大值为41.1433[2]。
5 试验过程和实验结论
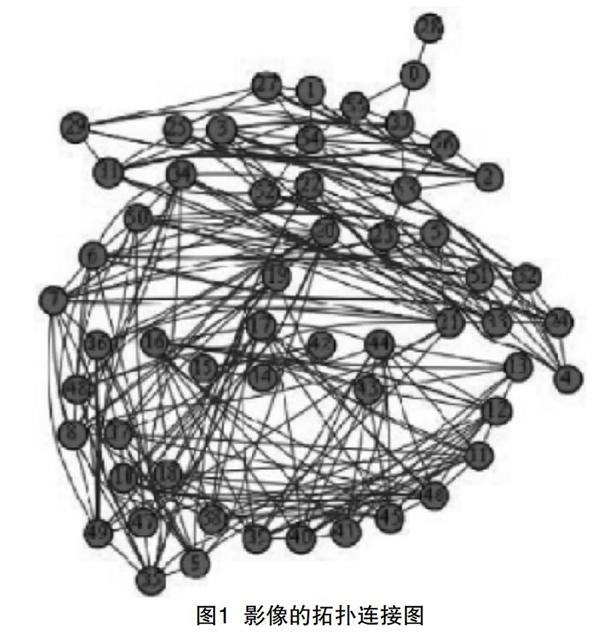
为了检验上述方法的效果,研究学者专门做了试验,采集的地点是发生小面积滑坡的地形,使用的是小型的固定翼无人机,预设的飞行高度为120m,设置旁向重叠率为60%,将航向的重叠率设置为90%。相机的像素为4320×3240。相机曝光的时间为0.002秒。共设置了4条航带,飞行的方向为南北。一共获得了52幅影像。在进行特征点匹配的工作中,用到了上述步骤,生成了影像的拓扑关系集,也生成了影像的拓扑连接图。如图1所示。从影像的拓扑关系集中我们可以知道共参与了310次的特征匹配。这一数值很明显的低于穷举匹配,穷举匹配指的是每一幅图像和其他所有图像进行匹配,穷举匹配的次数为1326次。由此可见这种算法有效的降低了匹配时间,也有效的降低了匹配的复杂度。
6结语
综上所述,本文研究利用无人机影像进行滑坡地形三维重建的相关内容,发现影像拓展关系的建立在无人机飞控数据的支持下,完成了特征点集的匹配,具有快速稳定准确的特点。在形成滑坡区地形的精细三维点云中用到了运动恢复结构算法,也用到了多视立体视觉算法。
参考文献
[1]宋晓阳,黄耀欢,董东林.融合数字表面模型的无人机遥感影像城市土地利用分類[J].地球信息科学学报,2018,20(05):703-711.
[2]王宏胜.基于面向对象的两阶段村域无人机影像土地利用分类研究[D].西南交通大学,2018.
Research on 3D Reconstruction of Landslide Terrain Using UAV Images
XI Yuan-fei ,SHI Yan ,ZHANG Lin-xian ,TIAN De-gang
(Hebei Institute of Architecture and Engineering, Zhangjiakou Hebei 075000)
Abstract:In order to study the geological landslide related content,proposed the uav image sequence landslide automatic 3 d terrain building method,this paper mainly studies image using unmanned aerial vehicle (uav) landslide terrain related contents of 3 d reconstruction, first introduced uav image,and then discuss the feature point extraction and matching of relevant content,to discuss how to set up sports recovery structure,the preliminary estimate of how the camera parameters,discusses the test process and the experiment conclusion. Finally,the 3-d reconstruction of landslide topography is analyzed.It is hoped that it can provide reference for researchers who pay attention to this topic.
Keywords:Uav image;Feature points;The camera parameters
