
具有车距检测的道路限高限宽装置
2018-01-30 21:09沈红雷
电子技术与软件工程 2017年15期
关键词:报警
沈红雷
摘要:一种能准确判断狭窄道路汽车是否能通过的装置,由激光传感器、超声波传感器、接受器、报警电路模块组成,其特征在于:激光发射与接收装置发出并接收激光,信号处理电路判断是否同时收到两束激光,如果没有收到,则发送信号给报警电路模块,提示安全通过,如果同时收到两束激光则发送信号给报警电路模块提示不可通过。本设计解决了目前汽车驾驶员判断道路宽窄用目测法误差较大之不足,具有结构及生产工艺简单,投入成本低,使用方便,节约时间,使用寿命长,可广泛应用于各种类型汽车,有广阔的市场前景等诸多优点。
【关键词】限高限宽 障碍检测 报警
1 概述
1.1 设计背景技术
在二十一世纪,汽车已经成为了人们普遍的交通工具,每一个有车的人都很爱惜自己的爱车,一旦有什么漆掉了,或者是哪里被刮花了,都觉得很心疼。然而当车子进入到一些偏远的小村庄或者是一条狭窄的小道,也许就会因为没有能正确判断道路的宽窄就直接通过,使得车子被刮花,刮花后还要进行打磨喷漆等汽车美容处理,汽车美容费相对来说也是一笔不小的数目,毕竟这也算是一笔不必要的支出。如果司机下车查看目测完之后再进行驾驶,也会浪费一些时问的。还有可能在未提前判断并及时掉头的情况下,但是后而却已经有车跟上来,导致交通堵塞,如果一不小心,甚至会与后而紧随的车辆发生交通事故。虽然目前已经由限宽限高的专利出现,但是它们主要是在道路上安装设施来判断汽车是否能安全通过。这种产品也有很多不足之处一一它一般只安装在车流量比较大的场合,但是对于千变万化的乡村道路来说,则很难实现,而且就算是安装在乡村,也会耗费相当大的财力。
1.2 具有信息存储功能的手机移动电源设计思路
本设计的目的在于克服了现在社会上对于道路宽窄判断不准确的情况,提供了一种能够即时判断出道路宽窄,并且发送一个报警信息让驾驶员能提前做出选择的判断装置。
本设计的目的是采用了以下技术措施来实现:一种能准确判断狭窄道路汽车是否能通过的装置,由激光传感器、超声波传感器、接受器、报警电路模块组成,其特征在于:车子每一侧离地而高低不同处各装一个激光发射接收器件,共有4个激光发射接收器件,均安装在汽车相应高度的最宽两侧,用于检测高低不等的道路障碍物,作出判断并播报道路宽窄信息让驾驶员能提前做出选择,并确保汽车能安全通过。
同时,在汽车的前后两端同时也装有超声波传感器。当汽车向前行驶时,前超声波传感器正常工作,向前方发射超声波并接收,以检测本车辆与前方车辆的距离,如果收到的检测结果超过预先设定的距离,则报警提示车距过窄;反之,如果未超过预先设定的距离,则不报警。当汽车倒车行驶时(一般为倒车入库),后超声波传感器正常工作,向后方发射超声波并接收,以检测本车辆与后方障碍物之问的距离,如果测量值超过预先设定值,则报警提示:如果测量值未超过预先设定值,则不報警,可正常行驶。
本设计提供的具有车距检测的道路限高限宽装置,具有相对其他产品的一些优点:
(1)结构及生产工艺简单:
(2)投入成本低;
(3)使用方便:
(4)节约时问:
(5)使用寿命长;
(6)可广泛应用于各种类型汽车,有广阔的市场前景。
2 具有车距检测的道路限高限宽装置工作详述
2.1 限高限宽工作详述
如图1所示,图为限高限宽工作框图,我们可以看到,当激光发射器与接收装置正常工作时,会一直发射激光以检测道路情况。信号处理电路用来处理接收到的反馈激光,如未收到反馈激光或者只收到一条反馈激光,则不足以触动报警电路,驾驶员可以正常行驶;如果检测到了两条反馈激光,信息处理电路则会触动报警电路,发出报警声音以提示驾驶员不可行驶。
2.2 车距检测工作详述
如图2所示,为车辆车距检测工作框图。当车辆向前行驶时,前方超声波传感器正常工作,发射超声波并接收,信息处理电路根据反馈回来的超声波,判断本车辆与前方车辆或者是障碍物的距离,如果该距离小于设定距离,则报警提示驾驶员减速慢行,以免发生交通事故;如果该距离大于设定距离,则不报警,驾驶员正常行驶。反之,当倒车行驶时,后方超声波传感器正常工作,发射超声波并接收,当测量距离大于设定距离,则可以正常倒车:如果测量距离小于设定距离,则报警提示驾驶员不要再倒车,以免发生碰撞。
PS:前行传感器设定距离与倒车传感器设定距离可为不同值。
3 硬件设计
3.1 激光传感器
3.1.1 激光传感器的定义
激光传感器:是一种利用激光的发射与回传来进行测量的传感器装置。
激光传感器一般由激光器、激光检车器(接收器)以及信号检测电路组成。
激光传感器具有很多的优点,如测量反应速度快,量程大,抗干扰能力强等等,不过相对一些老式的传感器来说,我觉得它最大的优点是可以实现无接触测量,这为很多的测量都提供了不小的便利。
3.1.2 激光传感器的分类
激光传感器按照工作物质来分,一般可以分为4类。
(1)固体激光器;
(2)液体激光器;
(3)气体激光器;
(4)半导体激光器。
顾名思义,这些激光器都是以他们的工作物质来命名的。而其中最常用的激光器要属固体激光器和半导体激光器,比如固体激光器中的公报是激光器、YAG激光器等等:再比如半导体激光器中的砷化镓激光器。
3.2 超声波传感器
3.2.1 超声波传感器的定义和分类
(1)超声波传感器的定义。超声波传感器:是一种利用超声波的发射与接收来进行测量的传感器装置。endprint
超声波传感器也就是超声波探头,一般来说,较为常用的材料为压电晶片,压电晶片既可以发射超声波,也可以接收反馈的超声波。
(2)超声波传感器的分类。按照其结构的不同,我们可以将超声波探头分为纵波探头、横波探头、表而波探头、兰姆波探头等等。
3.2.2 超声波传感器的工作原理
当超声波传感器正常工作时,有压电晶片通过机械振荡,将电能转化成超声波(也叫做超声波发送器),再将超声波发射出去,向周围辐射。当接触到目标是产生回馈,压电晶片接收到超声波时,再将超声波转化成电能(也叫做超声波接收器)。
3.3 激光传感器与超声波传感器的比较
激光传感器与超声波传感器同属于传感器,也是各有所长。那么我将从几方而来比较一下这两个传感器的性能。
3.3.1 从测量速度方而来比较
激光传感器的测量速度要比超声波传感器快上很多,毕竟一个是光速,一个是音速。
3.3.2 从抗干扰能力方而来比较
激光传感器相对来说,抗光干扰的能力相对较弱,而超声波传感器的却也容易被空气中的杂质影响,导致测量的失误,不过相对来说,超声波传感器的稳定性还是要强一点的。
3.3.3 从测量距离方而来比较
激光传感器的量程较大,但是其测距能力较弱,因为光速太快的原因,激光传感器往往不能在短时问内准确地记录下发射激光到接收激光的时问,也会使得测距的不准确;而相对来说,超声波传感器的测距则显得十分精准,并且其方向性很好,可以定向传播。
3.3.4 再从性价比方而来比较
激光传感器的电路较为简单,有一些基础的同学都是可以自己做出来的,并且价格低廉:而超声波传感器的价格相对较贵,不可能大量使用。
3.4 激光传感器与超声波传感器工作框图解析
如图3所示,为激光传感器与超声波传感器工作框图,因为激光传感器与超声波传感器均为测距传感器,所以其工作框图也差不多,这边列举一种统一的框图以作说明。
当传感器开始工作时,由单片机发送信号给定时器,过一定时问之后,传感器发射信号,如果遇到障碍物,则反馈信号;当接收器接到反馈信号后,由信号处理电路进行放大处理,再交由单片机判断传感器状态,如有障碍物,则发出报警声音提醒驾驶员。
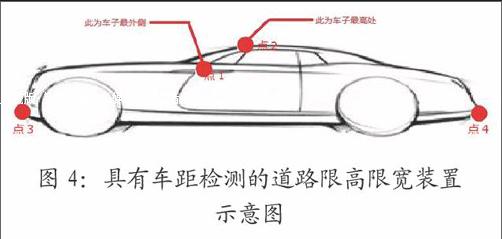
3.5 具有车距检测的道路限高限宽装置示意图及参数
如图4所示,为具有车距检测的道路限高限宽装置示意图。其中点1、点2均为ZYT-0100激光测距传感器,用于实现限高限宽功能,这种激光传感器具有如下优点:
(1)测量的距离为0.1-150米;
(2)测量的精度相对较高,只有+2毫米;
(3)测量速度快,可以测量运动中的物体,在我们这个课题中,因为车子是不断行駛的,所以连续测量对本课题是极为重要的:
(4)可以在恶劣环境中工作,耐高温,使用寿命较长,为50000小时以上;
(5)供电电压在10V到24V之间,功率消耗为1W。
ZYT-0100激光测距传感器分别装在汽车两侧的最外侧与最高处,共计四个传感器,这样可以在较远的距离测量前方状况,因为传感器装在车辆最外侧,所以当传感器未接收到回馈信号时,说明前而并没有可以阻挡车辆行驶的障碍物,车辆则可以正常行驶。
另外,点3、点4为KT40-1001A超声波传感器,用于实现车距检测功能,这种超声波传感器具有如下优点:
(1)测量距离为0.1-3米,与正常车距所匹配;
(2)尺寸小,重量轻,方便安装;
(3)正常使用温度为-40到85℃;
(4)灵敏度高,可以精确测量车问距。
KT40-1001A超声波传感器分别装在汽车前端与后端,共两个,负责车距检测功能。
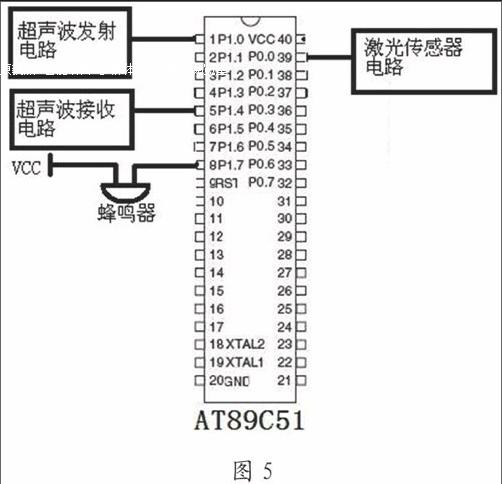
3.6 总电路示意图及解析
如图5所示,为总电路示意图。其中,将超声波发射电路接在P1.0口上,由单片机向超声波发射电路输送一个40KHZ的信号,并且开始技术,当超声波发射后,由超声波接收电路接收反馈,若频率在38 kHz至40 kHz左右,则超声波接收电路输出到P1.4口低电平,否则输出高电平,在接收到信号时停止计时,并计算所测距离;当所计算出来的距离小于正常车距,则接在单片机P1.7口的蜂鸣器工作,直至车距正常;激光传感器电路则是接在PO.O上,由PO.O控制激光的发射和接收信号的反馈若接收到反馈信号,则蜂鸣器工作,直至前方无障碍物。
4 软件设计
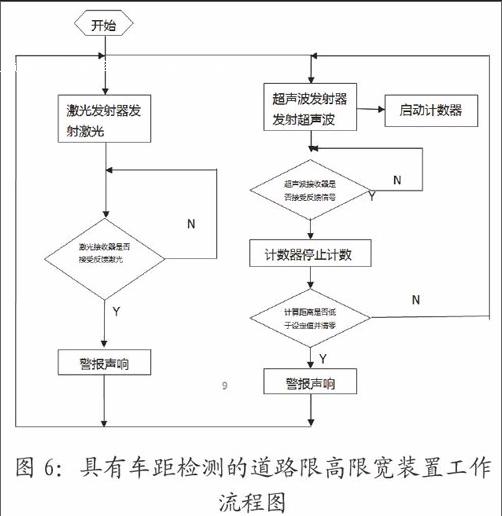
4.1 具有车距检测的道路限高限宽装置工作流程图解析
如图6所示,为具有车距检测的道路限高限宽装置工作流程图。当该装置开始运行时,激光发射器与超声波发射器分别发射信号,并进行检测,由接收器来检测是否收到反馈信号,如果为收到反馈信号,则重新检测,直到接收到反馈信号时,警报声响,直到无信号反馈。
5 结论
所以在本次设计中,我在限高限宽中使用的是激光传感器,因为其量程较大,可以在较远的位置就给驾驶员发出报警提示,节省了时问;而车距检测则是用的超声波传感器,因为其距离测量较为准确,可以精确控制,防『r发生不必要的意外。
参考文献
[1]吴顺君,杨晓春等,雷达信号处理和数据处理技术[M].电子工业出版社,2008 (09).
[2]童敏明,唐守铎等,传感器原理及检测技术[M].机械工业出版社,2011(04).
[3]陈敏,李军华,无线传感器网络原理及实践[M].化学工业出版社,2012(03).
[4]谭秋林,红外光学气体传感器及检测系统[M].机械工业出版社,2009 (06),endprint
猜你喜欢
铁道通信信号(2018年5期)2018-06-28
电子制作(2017年9期)2017-04-17
汽车维护与修理(2016年10期)2016-07-10
铁道通信信号(2016年4期)2016-06-01
汽车维护与修理(2016年3期)2016-02-28
小学生·多元智能大王(2015年3期)2015-05-25
自动化仪表(2015年11期)2015-04-01
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28
电子设计工程(2014年8期)2014-02-27
