
单站无源定位系统中EKF with u的应用
2018-01-30 12:04谢磊任海洋文剑澜
电子技术与软件工程 2017年15期
关键词:卡尔曼滤波
谢磊+任海洋+文剑澜

摘要
单站无源定位技术有着重要的军事应用价值。而辐射源方位的获取技术(比如干涉仪、比幅)相对成熟、可靠、实现成本较低,所以基于纯方位的无源定位技术得到了广泛研究及应用。本文采用带输入控制的卡尔曼滤波方法(EKF with u)对该定位系统进行了建模,初步探讨了系统估计和控制之间的交联问题。
【关键词】单站无源定位 纯方位无源定位 卡尔曼滤波
1 引言
电子支援措施(ESM)作为电子战的一部分,是利用敌方电磁辐射而采取的军事支援行动,包括对电磁信号的搜索、截获、识别、定位等,从而为其它军事行动提供依据。在专用电子战侦察机、无人机等领域,对辐射源的无源定位得到广泛应用。
常见的无源定位分为单站定位和多站定位。较之多站定位需要“多站之问同步时序、互传侦收结果”,单站定位的工程实现相对容易,因此备受关注。纯方位定位是单站定位的基础,因其“设备简单、成本低”而应用广泛。对纯方位定位系统的估计方法,大致分为:以最大似然估计方法(MLE)、最小二乘估计方法(LS)为主的非递归的批处理方法;以扩展卡尔曼滤波(EKF)为基础的递归方法。
2 EKF算法原理
EKF算法具有”忽略历史数据”的优点,使得数据储存要求变低,非常适合工程应用。而研究表明,观测平台的机动状态对系统估计有很大的影响,带有控制输入的扩展卡尔曼滤波(EKF with u)正好适合分析该影响。
考虑带有控制输入的离散时问非线性时变系统,将观测方程做一阶的泰勒式展开,可得近似线性时变方程,使用雅可比矩阵作为观测方程的系数矩阵,将非线性方程转化为线性方程。
3 Matlab仿真分析
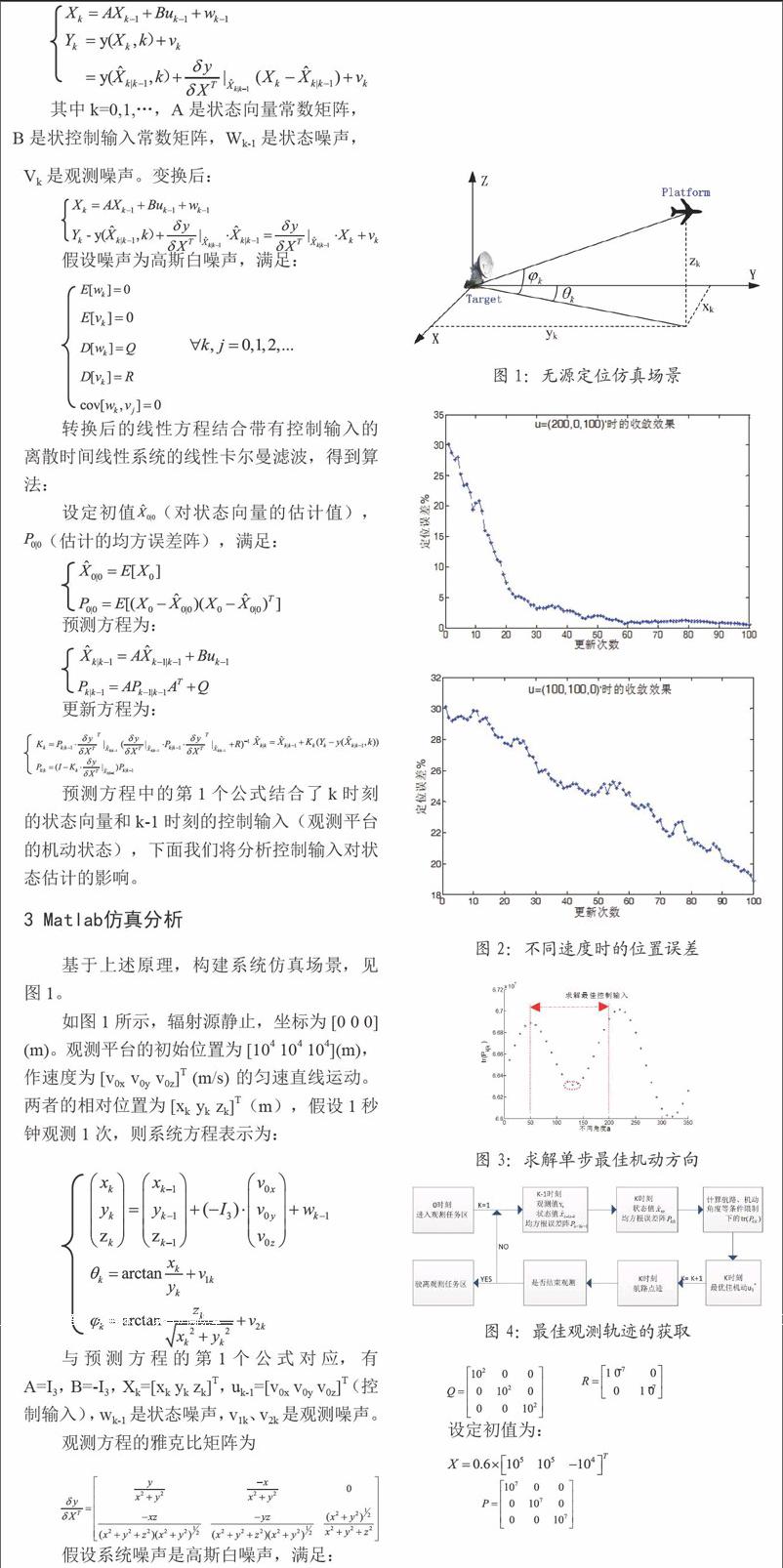
基于上述原理,构建系统仿真场景,见图1。
观测在不同速度(控制输入)下,定位收敛的情况:
辐射源定位误差随观测更新次数k的变化如图2。
根据仿真可知,控制输入对系统估计的收敛速度、精度都有较大影响。因此,选取更好的机动状态(控制输入)可改善系统估计的性能。
4 机动状态的选取
(1)观测平台只在水平方向有速度分量且保持匀速(进入观察任务区后,为了取得好的侦收效果,观测平台应保持平稳飞行,不做爬升和下降);
(2)执行侦察任务前,上级会对观测平台做出航路规划,出于安全等因素考虑,观测平台的机动应在规划(角度、区域)范围内变化,不能随意变化:
(3)观测平台的机动性能有限,不能做任意角度的变化,可根据平台的实际机动性能选取角度步进,并能减少运算耗时。
可将最优估计和最优控制结合起来,形成循环和迭代求解,得到不同时刻的最优估计和最优控制。即得到使得系统估计最佳的观测航迹,流程如图4所示。
5 结论
本文尝试在纯方位单站无源定位系统中,利用带有输入控制的扩展卡尔曼滤波器,将观测平台的最佳机动和对辐射源的最佳估计两个问题相结合,通过在限定范围内(航路、平台机动角度等),實时调整观测机的机动,以获得更优的辐射源位置估计。
参考文献
(1]赵国庆,雷达对抗原理[M],西安:西安电子科技大学出版社,1999.
[2]刘忠.单静止站纯方位系统的可观测性与目标参数估计算法[J].海军工程大学学报,2001 (10).
[3]刘忠,邓聚龙,等速运动观测站纯方位系统的可观测性[J].火力与指挥控制.2004 (12).
[4] Kaouthar Benameur, Optimal Passive Receiver Location for Angle Tracking, Surface Radar Sectior
(5]邓新蒲,周一字.单观测器无源定位误差下界的仿真分析[J].电子与信息学报,2002 (01).endprint
猜你喜欢
电子制作(2019年23期)2019-02-23
测控技术(2018年12期)2018-11-25
电测与仪表(2017年20期)2017-12-19
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年4期)2016-11-07
电源技术(2016年9期)2016-02-27
江苏科技大学学报(自然科学版)(2015年4期)2015-12-17
电源技术(2015年1期)2015-08-22
电测与仪表(2015年24期)2015-04-09
