
无人机飞行姿态检测及控制研究
2018-01-26 04:58广西机场管理集团有限责任公司
电子世界 2018年1期
广西机场管理集团有限责任公司 罗 浩
一、前言
随着我国经济迅速发展,科技也得以相应的进步,再加上我国在军事方面的思想转变,无人机逐渐在我国的军队上得以广泛应用,同时,我国许多企业,例如地质勘测等也都使用无人机,因此其在民用上也得以无广泛的应用。总之,无人机在进行飞行的时候,不论是用于攻击、侦查,还是测绘、航拍,都需要平稳的飞行姿态。因此需要对无人机飞行的姿态进行检测研究,确保无人机能够进行平稳的飞行。
二、自动驾驶仪的原理
所谓的自动驾驶仪,就是一种比较常用的反馈控制系统,这一系统主要是对无人机上的驾驶员进行代替,对飞机的飞行进行控制。图1主要是自动驾驶仪与无人机进行结合,组成的一个闭环系统。
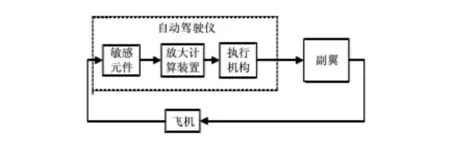
图1 自动驾驶仪组成的闭环系统
由图1可知,如果飞机在进行飞行的时候,发生偏离,系统中的敏感元件就会对飞机飞行时所偏离的实际方向得以感受,以此对相应的信号进行传输,同时通过对放大计算装置的运用,对无人机出现偏离的状况进行处理,然后对执行机构的使用,使控制面对发生的偏转进行修正。因此这一闭环系统在进行连接的时候,主要是对负反馈原则进行运用,因此此系统在对无人机进行控制的时候,就会使无人机在飞行的时候变回原先的状态[1]。如果飞机在进行飞行的时候变回到原先的状态,敏感元件所传出的信息就会变为零,同时系统中其他相关的控制面也都会变回原先的状态,这样无人机在飞行的时候,就会根据所预定的状态进行飞行。
三、无人机控制原理
(一)无人机飞行控制系统
无人机的飞行控制系统是整个无人机的控制中心,无人机能够进行自主导航以及自主飞行控制都依赖于这个指挥控制中心。其最主要的组成部分就是计算机,同时由相关的感应系统以及操作系统共同组成的,一个封闭环形的控制系统。
在对无人机进行飞行时,其控制系统的原理就是,无人机在空中进行巡航的时候,就会传回相关的巡视数据,这一系统就是对该数据进行检测,同时,检测的相应数据,就会及时的在飞机的控制系统中进行汇集[2]。例如,无线电的高度表将相关高度的信息进行回传时,同时也会将无人机的相关飞行状态以及信息进行回传,而GPS的应用,也会将相关的位置信息进行回传等,对于这些数据,都将通过控制系统进行相应的计算以及处理,然后通过一系列相关的控制方法以及策略,就可以计算出每个操作执行机构的控制量,然后将这些控制量分配到各个执行机构上,从而完成对无人机的控制。
对无人机进行控制,最主要的就是无人机在进行飞行以及完成任务的时候,能够按照人的意志进行完成,从而使飞行系统能够对飞机实现有效的控制。因此,想要使无人机在飞行的时候,飞行运动能够得以简化,飞机的相关设计人员就需要对飞机的纵向运动、横侧向运动进行研究。
(二)无人机纵向控制策略
无人机在进行纵向运动的时候,通常就是指无人机在垂直地面上进行运动,其通常是指纵向角运动和纵向线运动。
飞机的纵向角运动,其主要是对飞机飞行的仰角进行制定,飞机按照指定的仰角进行飞行,而飞机的俯仰角,在对无人机进行角运动的时候,通常都是以飞机的俯仰角进行控制,而俯仰角的数值来源,通常是通过惯性测量单元对相应的数据信息进行获取。同时,在对俯仰角进行控制的时候,所能够运用到的方法虽然有很多种,但是随着遗传算法的不断发展,以及其所具有的优越性,当前在无人机进行控制方法中使用的最为广泛。在控制飞机进行角运动时,飞机飞行时所产生的俯仰角的具体参数,通常会受到周期变化的影响,而且俯仰角在进行周期变化的时候,所需要的时间比较长,并且飞机上的干扰作用及其操作机构等干扰因素,都会使飞机在进行飞行的时候受到干扰[3]。因此,本文在对俯仰角的实际速度进行控制的时候,会将其作为俯仰角进行控制系统中的内回路,其在内回路当中主要是以俯仰角对俯仰角速率进行控制,而对外回路进行控制,主要是依赖于纵向角运动中的俯仰角。通过对俯仰角进行控制的相关系统,也就是俯仰角控制框图如图2所示。
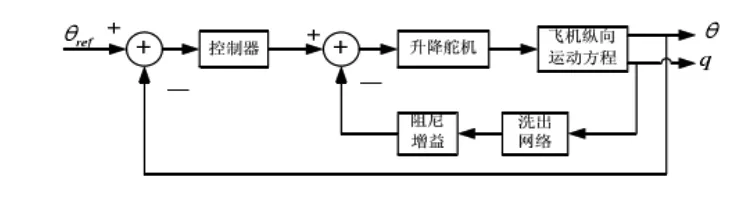
图2 俯仰角控制系统框图
根据对无人机进行建模时,舵机的功能,主要是对其相关环节进行简化,机带的宽度通常为10rad/s,其进行传递的函数为:
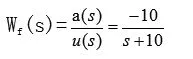
无人机在进行纵向线运动的时候,主要是对飞机飞行的具体高度进行控制,同时,无人机的实际飞行高度在进行变化的时候,主要影响的因素就是飞机的姿态,其主要是由于受到纵向通道的实际俯仰程度不同,而产生不同。
(三)无人机横侧向控制策略
在无人机的横侧向运动过程中,主要包含了滚转通道的控制和对偏航通道的控制。想要使无人机的横侧向运动能够符合控制的要求,就需要对滚转通道和对偏航通道这两个通道进行综合考虑,并进行分别研究。
对于横侧向运动控制中,最重要的就是对无人机的滚转角进行控制。同时,其也可以通过对纵向俯仰角的利用,进行研究:首先,可以将滚转角的角速度在滚转角控制系统中作为内回路;然后,将系统的传感器中所获取的滚转角作为被控对象,通过获取的滚转角数据与预定的滚转角的偏差,对舵机的运动进行控制,然后根据系统的信息反馈,使得无人机的滚转角能够不断的趋向于预定的滚转角,以此来完成对于滚转角的控制。图3主要是无人机的滚转角控制的过程展现的结构框图。
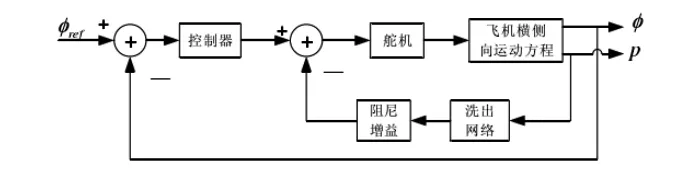
图3 滚转角控制系统结构框图
四、无人机自动起飞
(一)无人机自动起飞过程
无人机自动起飞的实际操作过程如图4所示,主要分为以下几阶段:
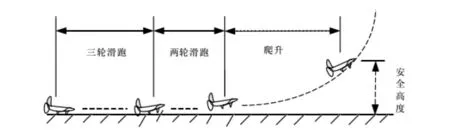
图4 无人机自动起飞的过程
(1)三轮滑跑阶段
三轮滑跑阶段,主要是指无人机在进行飞行的时候,其发动机所处于的工作状态是定额状态,这时无人机在进行滑跑的时候,就会逐渐加速。在无人机滑跑速度不断的增加的时候,无人机的相关气动力以及力矩也同样会增加。当无人机进行滑跑的速度和无人机前轮抬起的速度一致的时候,无人机的俯仰力矩就会形成额定值,接着无人机的前轮就会抬起,并进入到两轮滑跑。
(2)两轮滑跑阶段
当无人机处于两轮滑跑的阶段,这时的无人机,其油门就会处于定值状态,然后无人机开始进行加速,当无人机的气动升力比当时的重力大的时候,无人机的实际速度就会上升,并能够进行离地飞行,并进入向上爬升的阶段。
(3)爬升阶段
当无人机处于爬升的时候,就会持续加速飞行,为了使无人机的安全飞行得到保障,就需要将无人机飞行的速度不断进行提高。随着无人机飞行的高度不断的增加,就会失去地面效应,这时无人机就会进入到空中。当无人机飞行到一定高度,且达到安全高度的时候,无人机的起飞过程完成。
(二)无人机自动起飞控制策略
无人机在进行自动起飞时,对其纵向进行控制的时候,主要依赖于升降舵和油门。而无人机在起飞的时候,无人机本身在速度上具有较大的变化,因此,对其实际速度在进行变化的时候,是不需要进行精确控制的,所以无人机的油门一般是不用进行调节的。
升降舵主要是对俯仰角进行控制,以此使无人机在进行飞行时的姿态能够得以合理控制,并按照设定的程序无人机飞到预定的高度。无人机在飞离地面之后,在地面中所产生的低头力矩就会立即消失,与此同时,其抬头力矩会立即增大,当无人机彻底离开地面效应区的时候,没有地面效应,无人机就可以顺利飞行。如果无人机在飞行时,其俯仰角的增速太快的话,就会使其上升的速度受到影响,对于无人机的平稳飞行也产生了不利影响,因此需要对向上爬升飞行的速度通过积分进行确定,从而保证无人机能够以合适的速度飞行到安全的高度。无人机在进行自动起飞的时候,通常是由副翼以及方向舵所组成,并对飞机横侧向飞行进行控制。
五、结束语
本文主要介绍了自动驾驶仪原理以及飞行控制原理,主要是根据相关条件分为两部分,纵向运动以及横向运动,对其进行相应分析,同时对无人机在进行自主飞行以及降落时的相关控制策略进行了介绍。总之,随着我国科技的进一步发展,无人机的发展前景也逐渐广泛,特别是对无人机所具有的航程、续航能力、飞行速度等进行广泛的发展。同时,在未来的各类应用场景上,无人机的优势必将得到更加全面的发挥。
[1]刘歌群.无人机飞行控制器设计及检测与控制技术研究[D].西北工业大学,2004.
[2]郑伟光.四旋翼无人机飞行姿态控制系统研究[D].长春理工大学,2010.
[3]杨利红.固定翼无人机飞行姿态控制律设计[D].东北农业大学,2016.
猜你喜欢
军民两用技术与产品(2021年8期)2021-11-24
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
汽车维修技师(2019年7期)2020-01-16
经济技术协作信息(2018年30期)2018-11-22
中国惯性技术学报(2018年4期)2018-11-08
汽车维修技师(2018年11期)2018-05-11
解放军健康(2017年5期)2017-08-01
中学生数理化·高一版(2017年1期)2017-04-25
知识经济·中国直销(2016年2期)2016-11-07
交通建设与管理(2015年13期)2015-03-20
