国外远距斜视航空相机发展概况
2018-01-25 09:59李永昆林招荣张绪国
航天返回与遥感 2017年6期
李永昆 林招荣 张绪国
国外远距斜视航空相机发展概况
李永昆1,2林招荣1,2张绪国1,2
(1 北京空间机电研究所,北京 100190) (2 北京市航空智能遥感装备工程技术研究中心,北京 100190)
远距斜视相机是航空成像领域的典型产品,通过远距斜视成像,能够对对方及邻国边境、军事要地、战略部署等进行大纵深高品质详查。为发展中国航空远距斜视成像技术,吸纳国际先进技术,文章通过对全球鹰、DB-110等国际典型的传输型航空远距斜视相机的成像系统、主要参数、关键技术、系统特点等的详细介绍,指出了国际传输型航空相机的发展趋势,分析了斜视航空相机关键技术,可为发展中国的斜视航空相机提供一定的技术借鉴。
远距斜视成像 关键技术 发展趋势 航空相机
0 引言
航空成像是获取地面信息的重要技术手段,相比于卫星成像,航空成像更加机动灵活,能够弥补卫星成像的时效性和分辨率不足的缺点,提供更为详实的信息,是获取信息不可缺少的手段[1]。航空远距斜视成像相机是航空遥感成像设备的主要载荷形式之一。航空远距斜视成像技术(即通过有人、无人侦察机装载航空相机在斜视状态下对目标成像)是高效能的现代化侦察技术,是实现侦察与监视的重要手段,具有目标发现识别及技术分析的能力[2]。
利用机载远距航空斜视相机,无须进入成像区就可以安全的完成多种成像任务,如:海洋监视、大面积成像、点目标成像、海岸和边界监察预警、战斗前的情报准备、战斗中的敌情研究、目标的获取识别、攻击后破坏效果的评价以及作为卫星成像的补充。目前,利用机载远距斜视相机,可以对50 km至150 km的区域进行成像,具有针对性强、准确率高、获取信息时效性强、灵活机动的特点,可以在短时间内获取感兴趣的重要目标信息[3-4]。
1 国外远距航空斜视相机的发展概况
1.1 可见光传输型相机的成功研制
最初,世界各国采用胶片型相机进行军事侦察。胶片型航空相机是较早使用的成像设备,其缺点是装片量有限且飞机返航处理胶片需要一段时间,所以时效性低。1977年开始,仙童(Fairchild)公司开发了一种远距光电遥感系统,其目的在于开发并实验验证采用CCD成像的能力。伊台克(ITEK)公司将KA-102A相机同时使用胶片与光电传输,发现光电改进后的KA-102A可以完成更多的任务,能够做到实时有效传输信息数据,而且其成像光谱范围比胶片型相机宽,在雾、霾天等大气传输条件差的时候更容易获得信噪比高的图像。
美国芝加哥航空公司(CAI公司)于20世纪80年代末研制的焦距长、分辨率高、摄影覆盖面积大的CA-990机载远距斜视传输型相机,有效提高了图像实时传输的效率。它采用时间延时积分电荷藕合器件(Time Delay Integration Charge Coupled Device,TDICCD)作为接收器,由7片TDI64器件拼接成15 232个像元的焦面阵列。每片器件像元数为2 176,像元尺寸11 μm,数据率290Mbit/s,所获取的图像可在飞机上显示或以数字方式记录,并把记录的信息经过实时数据传输系统送到地面,得到高清晰和高分辨率的图像,在90 km倾斜距离(斜视角度±0°~±30°)时的像元分辨率可达0.37 m[5-6]。
1.2 国外典型传输型机载双波段远距斜视相机
可见光相机虽然分辨率高,但为了能够对目标进行昼夜连续成像,相机必须具备红外传感器。长焦距高分辨率远距斜视相机利用中波红外(3 μm~5 μm)具有穿透雾、霾、烟的能力,可以24 h应用,从而能够对目标实现全天时、全天候的连续成像。红外探测器的研制与红外成像探测技术的引入推动了世界各国对具有昼夜成像能力的机载双波段航空远距斜视成像相机的研制[7]。
目前,国外典型的传输型远距航空斜视双波段相机有美国Raytheon公司研制的全球鹰相机、Goodrich公司的DB-110相机、英国BAE系统公司的F-9120相机以及以色列Elbit光电公司生产的LOROP相机等,其主要技术指标见表1。
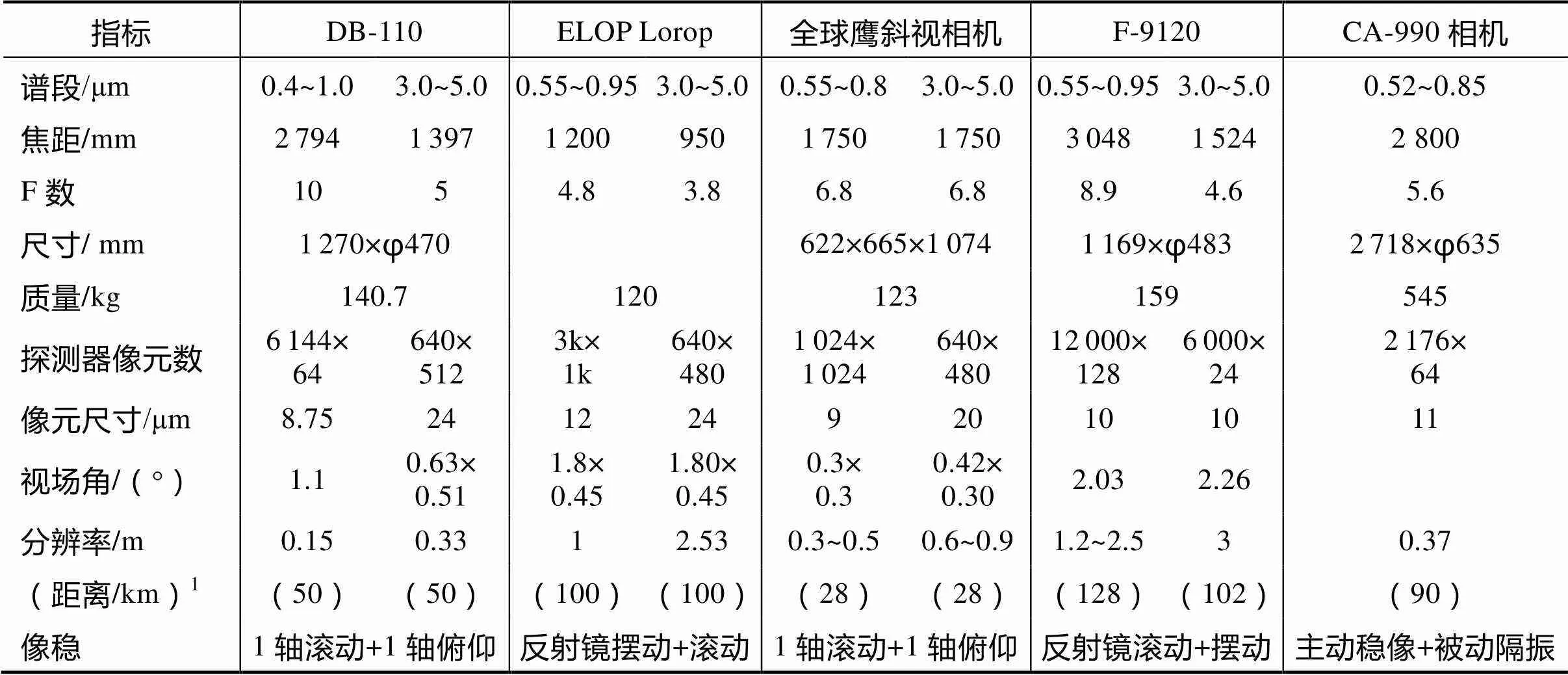
表1 典型相机参数
注1:获得分辨率指标的成像距离
下文将对以画幅式成像的全球鹰相机和以全景扫描成像的DB-110与F-9120相机的主要技术性能进行详细介绍。
1.2.1 全球鹰相机
全球鹰相机是美国Raytheon公司研制的一种具有广域搜索与目标定位能力的高精度、长焦距、双波段航空成像传输型相机。可见光谱段采用Kodak商用面阵CCD,波长范围0.55 μm~0.8 μm;红外谱段采用第三代InSb红外传感器,可以对波长为3.7 μm~5 μm的中波红外波段进行成像,能够识别车辆、飞机、导弹等目标。通过双波段组合获得单个谱段所不能得到的信息,使相机具备昼夜连续成像的能力。
可见光谱段焦平面像元数为1 024×1 024,红外为480×640;宽区域搜索模式幅宽10 km,定点模式覆盖区域2 km×2 km。设计指标为:太阳高度角45°、成像距离28 km时,可见光图像可达到国家图像解释级别(National Interpretation Rating Scale,NIIRS)6.5级(0.3~0.5 m),红外为5.5级(0.6~0.9 m)。宽区域搜索可以在一天之内覆盖4´104km2的区域,“聚束”模式1天可以采集1 900个2 km×2 km的区域。
成像时主镜连续扫描,内置反射镜后像扫描保持画面静止,整个光电系统安装于全球鹰相机的头部。在稳像方式上,该相机将光学系统安装在两轴稳定框架的内环中,控制相机光学系统沿滚动、俯仰两个方向运动,配合反射镜的视轴复合控制技术来实现相机的稳像与像移补偿功能,相机的视轴稳定精度达到3 mrad,稳定带宽能达到300 Hz,并可以实现30帧/s的高频步进凝视成像[8-9]。其相机与稳像系统如图1所示。
1.2.2 DB-110相机
DB-110相机是典型的双谱段传输型航空远距斜视相机,目前已成功发展到第三代产品,是当今世界上最有效的昼夜成像系统,它集成了最成熟先进的技术。
它采用两套共四组光学系统,第一套光学系统焦距长,可以获得20~80 n mile远目标的高分辨率图像,可见光焦距2 794 mm,红外波段焦距1 397 mm,第二套光学系统用于近距离成像,具有较强的适应性,相机能够在低、中、高三种高度工作。在成像方式上,可见光通道使用TDICCD器件,采用双向连续扫描的全景成像方式,大大提高了成像的总视场与成像效率。红外通道采用面阵器件“步进凝视”成像,在曝光时间内,通过后向扫描镜保证在成像时刻面阵器件所拍摄的区域一致,而且在成像时确保每两帧图像具有一定的重叠率。通过高品质的可见光和红外焦平面,使得相机能够获得较高的空间分辨率和信噪比。可见光谱段分辨率为0.15 m(距离50 km),红外谱段为0.33 m(距离50 km),扫描斜视角度4°~28°,覆盖范围可达23 km~100 km。
DB-110利用混合成像模式(扫描和步进凝视)达到了优化各个谱段性能的效果。可见光通道采用先进的64级TDI成像器件,能够提高目标亮度的调整能力,从而获得较高的信噪比。红外通道把两个商用器件(Commercial Off-The-Shelf,COTS)通过光学的方法耦合在一起,获得了较高的覆盖能力。第三代DB-110还增加了低空成像及中波红外超宽视场成像的功能,它集成了2.5英寸(1英寸=25.4 mm)焦距的红外传感器,使其能够在1 000英尺(1英尺=0.3048 m)的高度对目标昼夜成像。第三代DB-110实现了窄视场、宽视场和超宽视场三种视场成像的功能。在稳像技术上,第三代DB-110继承了前两代验证过的双轴稳定平台,这种双轴设计可以把飞机工作过程中的振动和像移控制在亚像元级,将光轴跳动精度控制在1/2个像素之内[10-13]。图2为相机外观图。
1.2.3 F-9120相机
F-9120相机是BAE系统公司研发的全铍铝双波段成像相机,其结构件与反射镜均采用铍铝合金作为材料,使得该相机最大的优点为结构紧凑、质量小。该相机配有长短两种焦距的光学系统,满足从中空到高空的垂视和斜视成像的要求。相机的可见近红外通道和红外通道都采用线阵TDI探测器实现全景扫描,通过集成红外传感器实现对目标昼夜成像监视的需求。EO遥感器的分辨率指标为太阳高度角大于30°状态下(斜距128 km)提供的可见光图像可达NIIRS为4级(1.2~2.5 m),红外波段在斜距为102 km时地面像元分辨率为3 m。在稳像方式上,相机采用俯仰与滚动两轴惯性稳像技术,通过驱动扫描镜沿滚动与俯仰两个方向转动来完成扫描稳像与像移补偿功能[14-15]。如图3为F-9120相机外观图。
2 航空远距斜视相机的关键技术
远距斜视相机经历了从胶片相机到数字双波段、多光谱的发展历程,其功能与成就的实现离不开一系列关键技术的突破。
高分辨率一直是研制航空远距斜视相机追求的关键指标,但高分辨率目标的实现使得远距斜视相机焦距长、成像光路复杂,因而对温度及载荷振动等环境变化都极其敏感而易造成离焦。考虑到航空相机始终处于高速运动等因素,给高分辨率双波段光学系统的设计、加工、装调等带来许多困难,严重影响着相机的成像品质、定位跟踪精度等。必须解决诸如像移补偿、惯性稳定控制及稳像、高精度自动环控、色散补偿、目标快速精准定位跟踪、广域监视搜索、高精度自动调焦等关键技术,以下将对这些关键技术进行介绍。
2.1 高精度惯性稳像与像移补偿技术
由于航空相机的高速运动、姿态变换、载体振动、大气湍流扰动等原因,使得相机在曝光时间内引起被摄物与成像介质的相对运动造成像移,导致成像模糊,影响图像的判读,所以惯性稳定控制、稳像与像移补偿技术是远距斜视相机的核心技术,稳像的好坏决定着相机系统的成像品质、指向精度、定位精度等。
一般认为像移量不超过1/3~1/2个像元不会造成图像模糊。远距斜视相机在曝光时间内产生的前向飞行像移量的计算公式为
式中为像移量;为飞机速度;为焦距;为航高;为曝光时间;θ为扫描角。某飞机飞行速度600~1 000 km/h,航高10~20 km,远距斜视相机焦距2 m,曝光时间为5 ms,扫描角30°,按其最小速高比算出最小像移量为41.67mm,远远超出了1/2个像元尺寸(目前TDICCD的像元尺寸约为8mm~24mm)。与卫星成像相比,航空成像由于速高比相对较大使得像移量远远超出了允许值,像移与飞机振动导致跟踪精度、跟踪稳定性、成像品质等大为下降,因此必须进行像移补偿与高精度稳像控制。良好的像稳技术是远距斜视相机在高速运动中获得高品质、高分辨率图像的前提。国外先进的机载双波段斜视相机大都采用俯仰、滚动两轴伺服控制系统实现像移补偿功能。加拿大L-3公司光电吊舱474HD采用X-Mast精密稳定技术与6轴被动隔振技术能够将稳定精度控制在2μrad以内,494HD与474HD类似,还采用了先进的噪声抑制技术、大气湍流抑制技术等使视轴稳定精度<1μrad。474HD与494HD如图4所示。
2.2 高空高精度自动环控技术
除像移外,温度、气压是影响相机成像的主要因素。与卫星成像相比,工作在20~30km高空下的航空相机,其外界环境在短时间内发生极大变化,空中的典型温度可达-50℃,压强为0.1Pa,与地面常温常压相比,相机环境变化极为恶劣。因此机载相机高速运动中,随着成像环境与高度的变化,气压、温度等的改变将引起焦距、镜面及成像介质一系列变化,镜面、焦面发生偏移引起离焦致使像质严重下降,尤其是对高分辨率长焦距斜视相机的影响更大,所以要对相机工作环境进行自动实时控制,将其工作环境控制在成像要求允许的范围内。据报道,474HD光电吊舱的温控精度可达到±0.2℃[16-17],光电吊舱外形见图4。
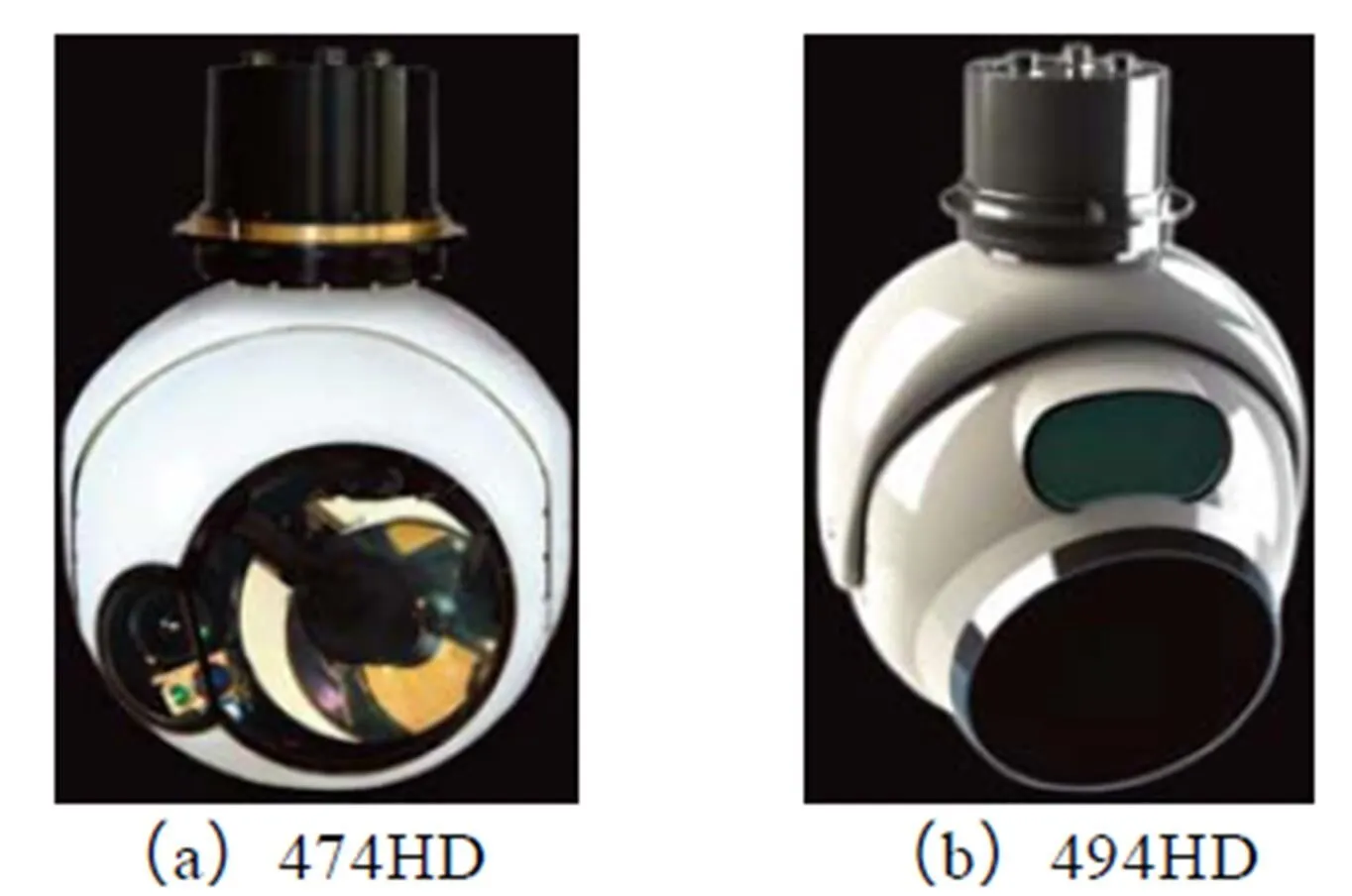
图4 光电吊舱外形图
2.3 目标快速精准定位跟踪技术
信息化战争的出现提出了对目标快速精准定位跟踪的要求,与卫星成像相比,航空成像具有针对性强、机动灵活的特点。斜视相机在高速运动中快速成像并实时对目标进行定位、跟踪、监测,获得目标形状、位置、运动速度等属性,掌握目标运动状态变化,理解目标的行为目的,满足精确成像的要求,做到“抓得到,跑不了”。航空相机通过集成先进的定位跟踪模块能够在高速运动中对目标精准捕捉追踪,这是优异于卫星成像最为显著之处,是航空斜视相机必须掌握的关键技术。在国外,先进的目标定位技术已应用于多种武装设备,包括基于测角的实时定位、融合数字地图(DEM)和视频导航的准实时定位,其定位精度可以达到“米”级。
2.4 TDICCD总线适配技术
航空TDICCD相机系统为了清晰的获取目标图像,需要机载导航设备实时提供飞机的姿态和运动信息.与卫星成像相比,航空相机运动状态变化极快,相机稳定系统工作需实时引入飞机俯仰、滚动与速高比等数据,相机总线适配技术是实施相机与机载导航设备信息共享与融合的关键。根据TDICCD图像传感器的特性,驱动TDICCD时序控制电路的行扫速度必须与像移速度严格同步,即行扫速度随着飞机速高比变化而改变,这就需要设计出符合CCD正常工作时的、与相机运动状态快速变化相匹配的、精确的定时脉冲和驱动控制电路,解决TDICCD的总线适配技术。只有当定时和驱动控制脉冲与CCD传感器配合良好时,才能发挥CCD的光电转换功能[18-19]。
3 国外传输型远距航空斜视相机的发展趋势
目前,国外远距斜视相机遇到的主要困难是:1)红外成像探测技术温度灵敏度还有待提高,尤其是目标源温度与环境伪装物体温度接近时,如何提取目标源的光谱信息至关重要,这对夜间及恶劣天气条件下成像伪装目标具有重要的发展意义;2)高精度自动环控技术不足,造成相机在温差、气压差大的条件下,镜面、焦面发生较大偏移而对像质产生极大影响;3)焦距长、相对孔径大使得相机格外笨重,相机质量和外形过大严重制约着其他技术模块植入远距斜视相机。
基于目前对超高分辨率、目标快速精准定位、通过机载相机获取更丰富的图像和光谱信息以及能够对图像信息快速实时处理的需求,能够进行昼夜连续成像的高中低空高精度战术成像的综合性系统将是未来航空相机的主要研究对象。
通过前文对国外典型相机关键技术、系统特点、性能指标等的分析,结合国际应用市场的需求,未来的航空相机主要有以下发展趋势:
1)全色全景扫描TDICCD将成为主要的成像方式。全景扫描成像的优点在于通过相机扫描扩大了成像的总视场,而且全景扫描成像像元配准好、定标方便、数据稳定性好;
2)多光谱、高光谱、超光谱成像技术的应用前景很好,光谱成像传感器依靠目标与背景的固有光谱差别成像,具有更好的反伪装、反隐身等反欺骗能力,多光谱航空成像相机将会是航空远距斜视成像相机的重点发展方向;
3)传统长吊舱向球形转塔和长吊舱两种结构形式并存发展。球形转塔的能够适应平流层飞行、高空长航时无人机等平台,实现广域360°搜索成像、跟踪和定位,以进行高精度成像[19-20]。
4 结束语
本文以国外先进的传输型航空远距斜视相机为主要研究对象,详细介绍了国外典型相机的主要技术性能,总结了未来航空相机的发展趋势,为未来发展航空远距斜视成像技术提出了发展方向,并为中国发展远距斜视成像技术提供了技术借鉴。
[1] 杨秉新. TDICCD在航天遥感器中的应用[J]. 航天返回与遥感, 1997, 18(3): 15-18. YANG Bingxin. Application of TDICCD in Space Remote Sensor [J]. Spacecraft Recovery & Remote Sensing, 1997, 18(3): 15-18. (in Chinese)
[2] 刘明, 修宏吉, 刘刚. 国外航空侦察相机的发展[J]. 电光与控制, 2004, 11(2): 56-59. LIU Ming, XIU Hongji, LIU Gang. The Development of Overseas Aerial Reconnaissance Camera[J]. Electronics Optics & Control, 2004, 11(2): 56-59. (in Chinese)
[3] 黄文斌, 高连义. 航空摄影的走向与变化[J]. 西北测绘信息, 2000 (1): 6-8. HUANG Wenbin, GAO Lianyi. Future Development Routes and Trends of Aerial Photography[J]. Northwest Surveying and Mapping Information, 2000 (1): 6-8. (in Chinese)
[4] 田海英, 刘明. 基于扫描反射镜的航空相机前向像移补偿[J]. 光电工程, 2014, 41(9): 20-24. TIAN Haiying, LIU Ming. The Forward Image Motion Compensating Scheme of Aerial Camera Based on Scanning Mirror[J]. Opto-Electronic Engineering, 2014, 41(9): 20-24. (in Chinese)
[5] 崔庆丰. 长焦距高分辨率航侦相机物镜设计[D]. 长春: 长春理工大学, 2011. CUI Qingfeng. Design of Telephoto Lens for High Resolution Long Range Aerial Reconnaissance Camera[D]. Changchun , Changchun University of Science and Technology, 2011. (in Chinese)
[6] 徐永森, 丁亚林, 田海英, 等. 推扫式航空遥感器像移补偿精度分析[J]. 光学精密工程, 2009, 17(2): 453-459. XU Yongsen, DING Yalin, TIAN Haiying, et al. Analysis of Image Motion Compensation Accuracy for Aerial Push-Broom Sensor[J]. Optics and Precision Engineering, 2009, 17(2): 453-459. (in Chinese)
[7] 王大海, 梁宏光, 邱娜, 等. 红外探测技术的应用与分析[J]. 红外激光与工程, 2007, 36(z2): 107-112. WANG Dahai, LIANG Hongguang, QIU Na, et al. Application and Analysis of The IR Detection Technology[J]. Infrared and Laser Engneering, 2007, 36(z2): 107-112. (in Chinese)
[8] Jane's Electronic Mission Aircraft. Global Hawk Integrated Sensor Suite[J]. Integrated Synthetic Aperture Radar Sensor System, 2011.
[9] LAREAU A G, PARTYNSKI A J. Dual-band Framing Cameras: Technology and Status[J]. International Symposium on Optical Science & Technology, 2000, 4127: 148-156.
[10] SEMENTELLI R G. EO/IR Dual-band Reconnaissance System DB-110[J]. SPIE The International Society for Optical Engineering Airborne Reconnaissance, 1995, 2555-30: 222-228.
[11] RIEHL K, MAVER L A, SEMENTELLI R G. The Raython DB-110 Sensor: Four Cameras in One Package[C]//National Military Sensing Symposium, 1999.
[12] Jane's Electronic Mission Aircraft. DB-110 Dual-band Reconnaissance System[J]. Integrated Synthetic Aperture Radar Sensor System, 2011.
[13] IYENGAR M, LANGE D. The Goodrich 3rd Generation DB-110 Syetem: Operational on Tactical and Unmanned Aircraft[J]. Health Care Management Review, 2006: 620909-620909-14.
[14] RUSSO M J, LOBIONDO S, COON B, et al. Beryllium Optics and Beryllium-aluminum Structures For Reconnaissance Applications[J]. Optical Engineering + Applications, 2007, 6666: 66660T-66660T-14.
[15] 李福东. 航空远距离倾斜摄影相机扫描稳像及像移补偿技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2015. LI Fudong. Research on Scanning & Motion Compensation of Airborne Camera for Long Range Oblique Photography[D]. Harbin: Harbin Institute of Technology, 2015. (in Chinese)
[16] 贾平, 张葆. 航空光电侦察平台关键技术及其发展[J]. 光学精密工程, 2003, 11(1): 82-88. JIA Ping, ZHANG Bao. Key Technologies and Development of Aviation Photoelectric Reconnaissance Platform [J]. Optical and Precision Engineering, 2003, 11(1): 82-88. (in Chinese)
[17] 金伟其, 王霞, 张其扬, 等. 多光轴一致性检测技术进展及其分析[J]. 红外与激光工程, 2010, 39(3): 526-531. JIN Weiqi, WANG Xia, ZHANG Qiyang, et al. Technical Progress and Its Analysis In Detecting of Multi-Axes Parallelism[J]. Infrared and Laser Engineering, 2010, 39(3): 526-531. (in Chinese)
[18] 张萍, 易东云, 吴翔. 红外扫描相机的测量误差分析与建模[J]. 红外技术, 2003, 25(6): 14-16. ZHANG Ping, YI Dongyun, WU Xiang. The Measured Error Analysis and Modeling of Infrared Scan Camera[J]. Infrared Technology, 2003, 25(6): 14-16. (in Chinese)
[19] 张华斌, 张庆中. 红外焦平面阵列技术和发展趋势[J]. 光学精密工程, 2005(5): 6-10. ZHANG Huabin, ZHANG Qingzhong. Infrared Focal Plane Array Technology and Development Trend[J]. Optics and Precision Engineering, 2005(5): 6-10. (in Chinese)
[20] 徐永森, 田海英, 惠守文, 等. 国外传输型相机的发展现状与展望[J]. 光机电信息, 2010, 27(12): 38-43. XUN Yongsen, TIAN Haiying, HUI Shouwen, et al. Trend and Development Actuality of the Real-time Optical Transmission Airborne Reconnaissance Camera[J]. Ome Information, 2010(12): 38-43. (in Chinese)
(编辑:毛建杰)
Development Survey of Foreign Aerial Cameras for Distant Oblique Reconnaissance
LI Yongkun1,2LIN Zhaorong1,2ZHANG Xuguo1,2
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100190, China) (2 Beijing Engineering Technology Research Center of Aerial Intelligent Remote Sensing Equipments, Beijing 100190, China)
The aerial long-range oblique reconnaissance camera is a typical product in aerial reconnaissance. Through the long-range oblique reconnaissance, high quality detailed investigation can be conducted on the border of the neighboring countries, military areas and strategic deployment. In order to promote the development of the aviation remote squint imaging technology in China by absorbing advanced foreign technology, many aspects of the typical transmission type aerial distant squint cameras, such as HAWK and DB-110, are introduced in detail, including the imaging system, main parameters, key technologies and system characteristics. The development trend of transmission type aerial camera abroad is pointed out, and the key technologies of squint aerial camera are analyzed, which can provide some technical references for the development of squint aerial camera in China.
long-range oblique reconnaissance; key technology; development trend; aerial camera
V245.6
A
1009-8518(2017)06-0011-08
10.3969/j.issn.1009-8518.2017.06.002
李永昆,男,1992年生,2015年获南京理工大学机械工程及自动化专业工学学士学位,现在中国空间技术研究院飞行器设计专业攻读硕士学位。研究方向为空间光学遥感器总体设计。E-mail: yongkunli1992@163.com。
2017-08-28
猜你喜欢
环球时报(2022-05-23)2022-05-23
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
金桥(2021年4期)2021-05-21
康颐(2020年14期)2020-11-10
锦绣·上旬刊(2020年3期)2020-06-08
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
美与时代·城市版(2016年12期)2017-04-26
中老年健康(2016年1期)2016-03-07