临近空间慢速飞行器载荷概述
2018-01-25 09:59张凯华蒋祎廖俊
航天返回与遥感 2017年6期
张凯华 蒋祎 廖俊
临近空间慢速飞行器载荷概述
张凯华1蒋祎2廖俊2
(1 上海航天技术研究院,上海 201100)(2 中南大学航空航天学院,长沙 410006)
随着经济需求与军事需求的牵引和科学技术的进步,临近空间慢速飞行器因其良好的驻留能力和适用于对地观测、通信、打击的大视野和驻留高度,受到广泛关注。文章结合临近空间平流层不受云、雨、雪、雾干扰的气象特点和距离地表高度20~100 km之间的高度特征,分析了临近空间慢速飞行器在有效工作时间、成本、设备工作效果相对于卫星和飞机的优势,以及临近空间慢速飞行器的在飞行速度和飞行高度上的参数约束和目前临近空间慢速飞行器的具体分类。根据临近空间慢速飞行器的负载能力和运动特性对比当前卫星和飞机上实际应用有效载荷种类和有效载荷性能需求,对临近空间慢速飞行器有效载荷进行了讨论。文章着重论证了合成孔径雷达(SAR)有效载荷、可见光有效载荷、红外有效载荷、通信中继有效载荷、武器有效载荷在临近空间慢速飞行器上的可行性和应用优势,分析了临近空间慢速飞行器有效载荷的发展趋势,为临近空间慢速飞行器有效载荷的发展和有效载荷的应用选择提供了参考。
通信中继 合成孔径雷达 电子攻防 临近空间飞行器
0 引言
临近空间是指高于航空飞机飞行的最高高度且低于航天卫星运行的最低高度的一段区域,一般指的是距离地面20~100 km高的一段空间,由平流层的大部分、中间层、热层的底部组成[1]。平流层由于距离地面较远,重力作用受到抑制,达到静力平衡,大气垂直运动不明显,以水平运动为主,不受云、雨、雪、雾天气的影响,能见度高。临近空间慢速飞行器主要分布在50 km以下的平流层,可以通过控制实现临近空间慢速飞行器在空中的长时间驻留,在对地观测、通信、打击等方面有良好的应用前景[2]。
临近空间飞行器按照其飞行速度可分为两大类:一类是临近空间超声速飞行器和临近空间高超声速飞行器;另一类是临近空间慢速飞行器,指飞行速度小于30 m/s的在临近空间做“准静止”运动的飞行器[3-4]。临近空间慢速飞行器按照其形态特点、飞行高度等特性可以分为高空气球、平流层飞艇、长航时太阳能无人机三类。高空气球,是一种无动力浮空器,依靠轻于空气的气体(如氢气、氦气)提供升力,根据球体材质和气球体积的不同,负载能力从几千克到数吨不等,典型的高空气球有西班牙研制的“Diameter Balloon”,印度军方研制的“Akashdeep Aerostat”气球观测平台等;平流层飞艇,主要依靠轻于空气的气体提供升力,携带动力装置用于平流层抗风和水平运动,尺寸可达几十米甚至上百米,大型载重飞艇的运载能力可达500 t以上,负载能力大,在地形测绘、放线及军事上都有一定的应用,如美国DARPA主持研究的HAA飞艇等;太阳能无人机,依靠太阳能电池供电和大面积机翼产生的浮力提供升力,飞行在200km以上的高空,生存能力较强,如NASA的Helios太阳能无人机[5]等。临近空间慢速飞行器在高度、视野、驻留能力等方面相对于在轨卫星和对流层飞机在对地观测、通信和作战打击等应用上具有优势。
本文针对临近空间慢速飞行器的应用问题,对比当前在轨卫星和对流层飞机有效载荷的种类和特点,分析了临近空间慢速飞行器民用和军用可选有效载荷及其发展现状(如表1所示),对目前临近空间慢速飞行器有效载荷研究现状进行了概述,并对其发展趋势进行了分析和讨论。
表1 各飞行高度飞行器特点
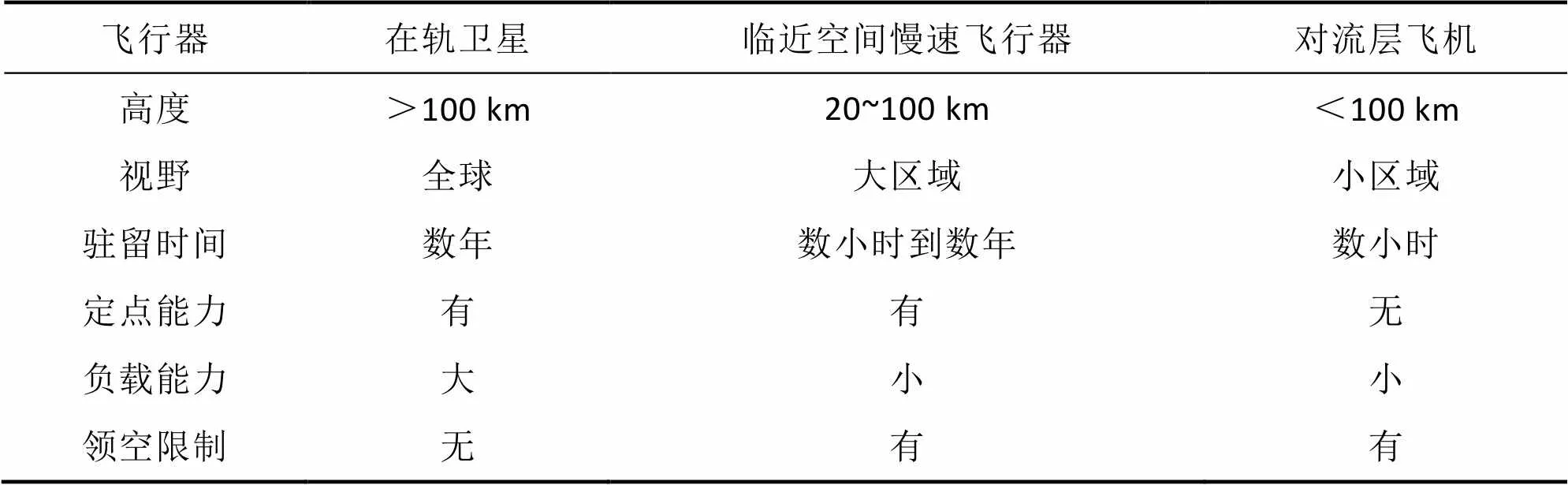
Tab.1 Characteristics of each flight height vehicle
1 临近空间慢速飞行器有效载荷
临近空间慢速飞行器有效载荷按照应用领域不同,可以分为三类:1)对地观测,挂载合成孔径雷达(SAR)、可见光摄像机和红外摄像机对低于临近空间慢速飞行器高度的动目标进行全天候清晰成像,精确观测;2)通信,临近空间慢速飞行器作为通信中继可以解决大视野和高分辨率冲突的问题,快捷高效地实现区域中继通信;3)作战打击,挂载武器在超视距作战方面有重要的战略优势,弥补了现有临近空间高度上武器装备的不足,提高部队海陆空天一体化作战的能力。
1.1 合成孔径SAR有效载荷
合成孔径SAR是一种利用合成孔径技术,通过发射高带宽脉冲的对地微波成像观测系统,在卫星和对流层飞机上已有广泛应用[6-7]。
星载合成孔径SAR作用距离普遍大于100km,数颗卫星组网即可覆盖整个地球,但是由于单个卫星无法定点驻留,卫星组网观测成本过高,并且星载SAR分辨率不足和信号易受干扰等因素限制了星载SAR在精确观测领域的应用。机载合成孔径SAR的分辨率可以达到米级,作用距离从几十千米到上百千米不等,不足之处在于对流层飞机无法长时间定点驻留导致机载SAR在对特定区域长期观测方面应用价值较小,平台飞行高度低导致机载SAR的覆盖范围受到限制。如表2和表3所示。
表2 星载SAR的主要指标
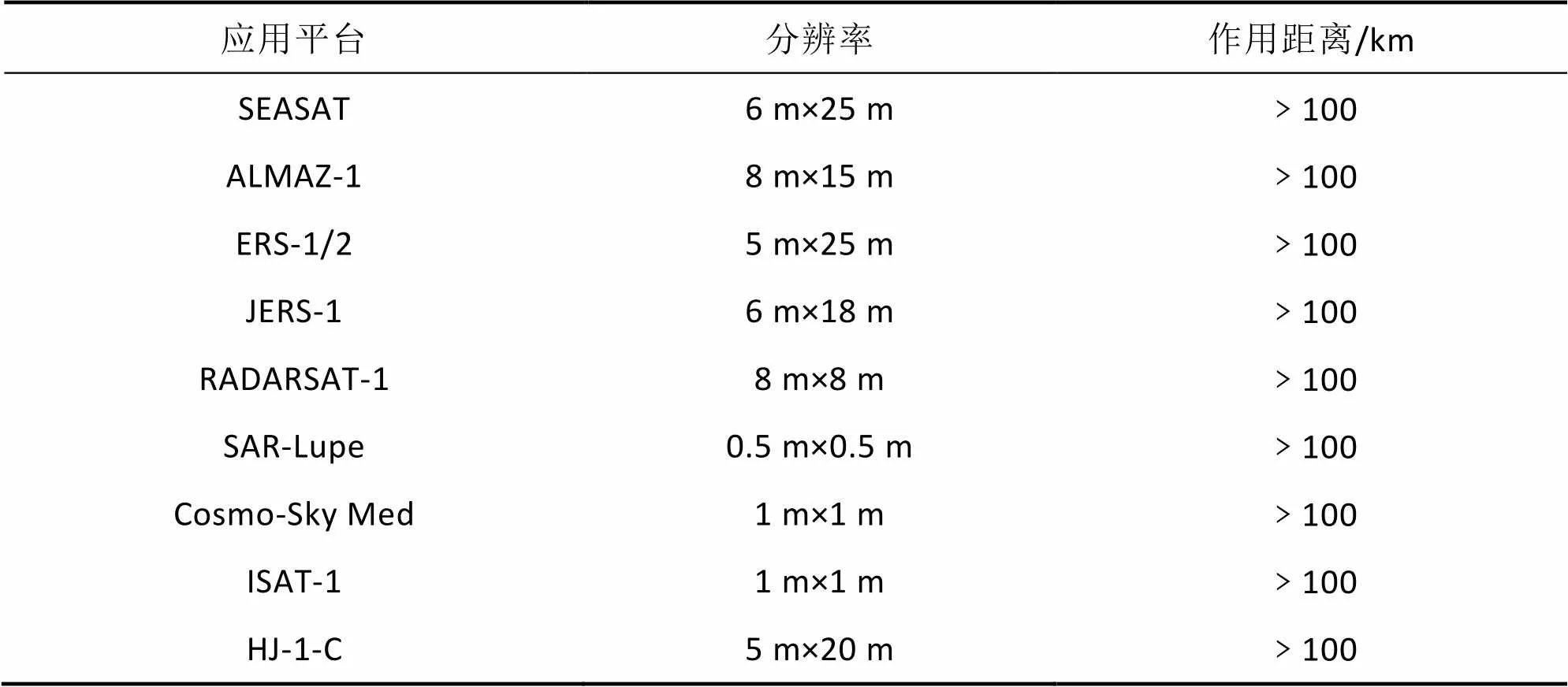
Tab.2 The main indicators of space borne SAR
表3 机载SAR的主要指标
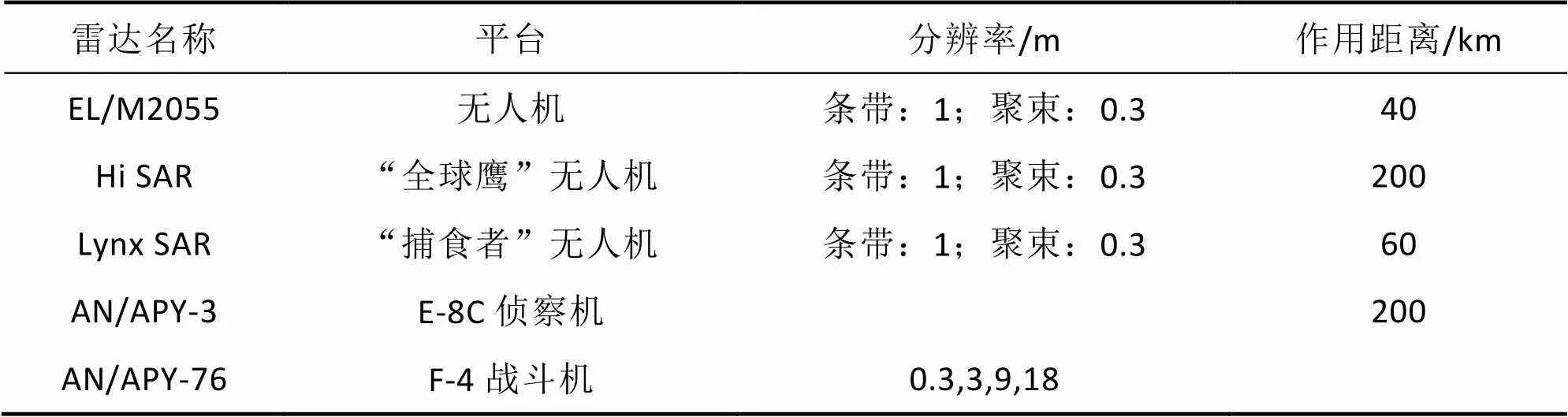
Tab.3 The main indicators of airborne SAR
临近空间慢速飞行器挂载合成孔径雷达可以有效弥补现有机载SAR和星载SAR留空观测时间短、成像覆盖范围小的缺陷,具有对同一地区长时间、大场景、高分辨持续观测的能力[8]。1999年德国宇航中心(DLR)将SAR应用于飞艇对海平面进行观测[9];2005年,美国宇航局DARPA联合洛克希德·马丁公司开展的HAA计划,利用飞艇搭载SAR监视类似阿富汗这样远离美国本土的国家和地区。国内电子科技大学、中国科学院电子研究所、北京航空航天大学、国防科技大学、中国电子科技集团第三十八研究所、中国航天科工集团第二研究院二十三所等单位对在临近空间慢速飞行器上使用合成孔径SAR的相关技术进行了研究[10-13]。根据临近空间慢速飞行器运动特性,在该平台上应用合成孔径SAR应有如下特点:
1)部署速度快,高分辨率与宽测绘带的矛盾小。星载SAR由于平台高度过高,高分辨率与测绘带宽存在尖锐的矛盾,且对同一地区连续观测时间间隔过长,机载SAR机动性好,部署速度快,受平台高度、飞行速度的限制,观测幅宽较窄。临近空间慢速飞行器部署速度远快于卫星,高度低于卫星且远高于机载SAR平台,根据国防科技大学杨海光等对合成孔径SAR成像的研究,地面杂波的多普勒带宽与平台运动速度成正比[14],临近空间慢速飞行器的运动速度远低于常规的卫星和飞机,地面杂波带宽窄,有利于动目标和静目标回波分离(如表4所示)。综合考虑部署速度、分辨率和测绘带,临近空间慢速飞行器挂载合成孔径SAR用于观测十分有利。
2)合成孔径大,运动误差大,运动补偿问题突出。临近空间慢速飞行器由于大气扰动等原因会导致飞行器实际航迹与理想航迹产生偏差,导致合成孔径SAR天线相位误差和天线指向误差。国防科技大学王晓峰[10]提出了针对临近空间慢速飞行器的基于系统传输函数和傅里叶变换的运动补偿系统,处理飞行器理想航迹与实际航迹偏差问题,对临近空间慢速飞行器进行运动误差补偿,提高合成孔径SAR的观测精度。
1.2 可见光有效载荷和红外有效载荷
光学探测是由探测目标反射或辐射的光线被传感器接收,得到目标的几何外形或成分信息,对目标进行识别、探测。光学探测目前研究和应用最广的主要是可见光探测和红外探测。可见光和红外的探测波段如表5所示。
光学探测是目前为止研究最深入、应用最广泛的探测手段,光学探测设备已广泛应用于各个行业,部分在轨卫星和对流层飞机挂载光学探测设备的应用实例[15-16]如表6和表7所示。
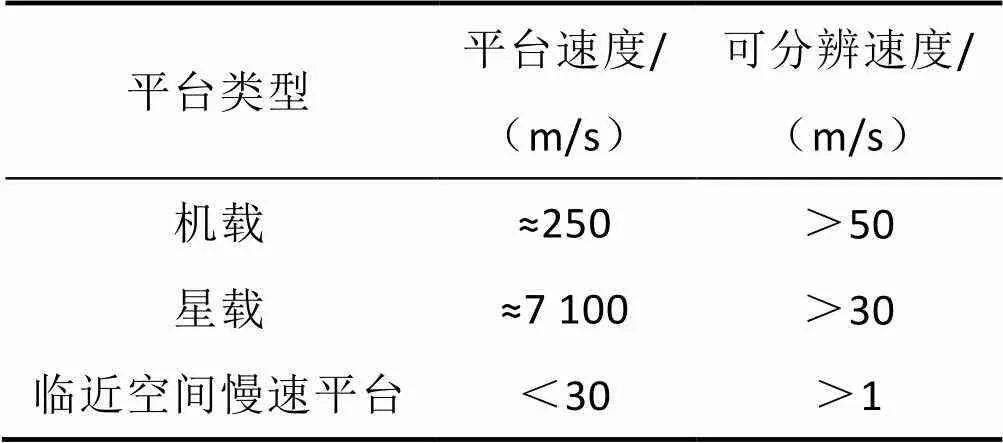
表4 不同平台SAR对可分辨动目标速度的要求
表5 太阳光谱分布
Tab.5 Solar spectral distribution
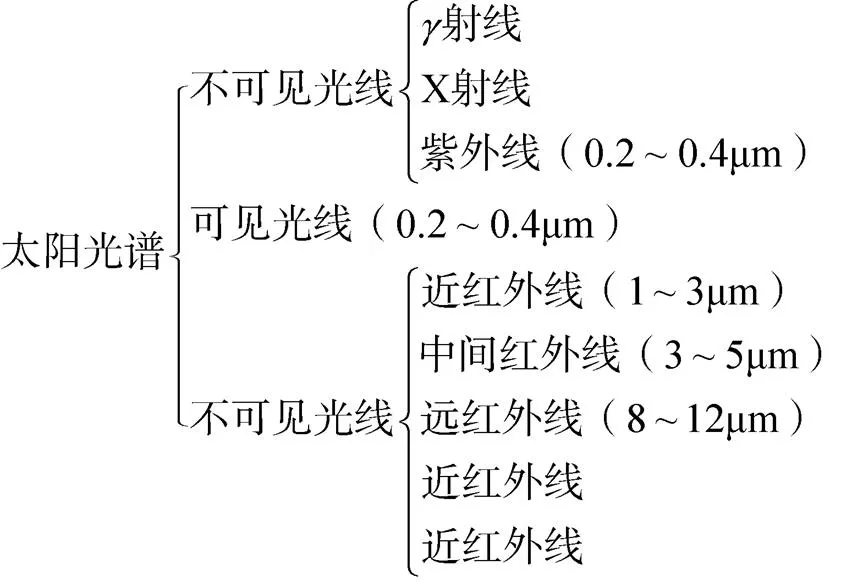
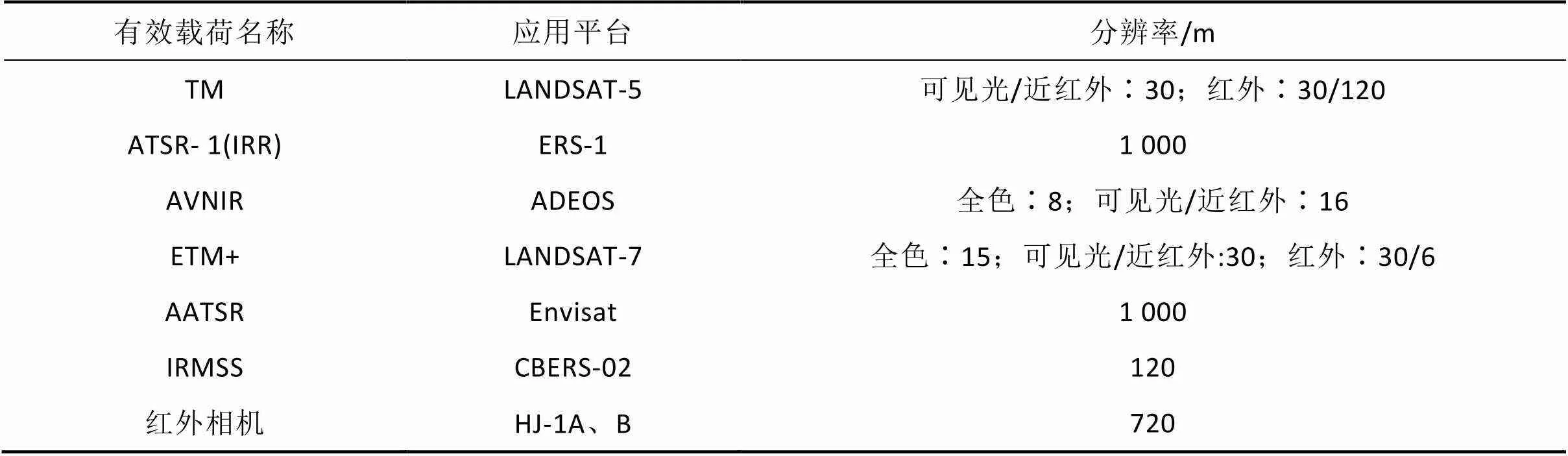
表6 星载光学探测主要指标
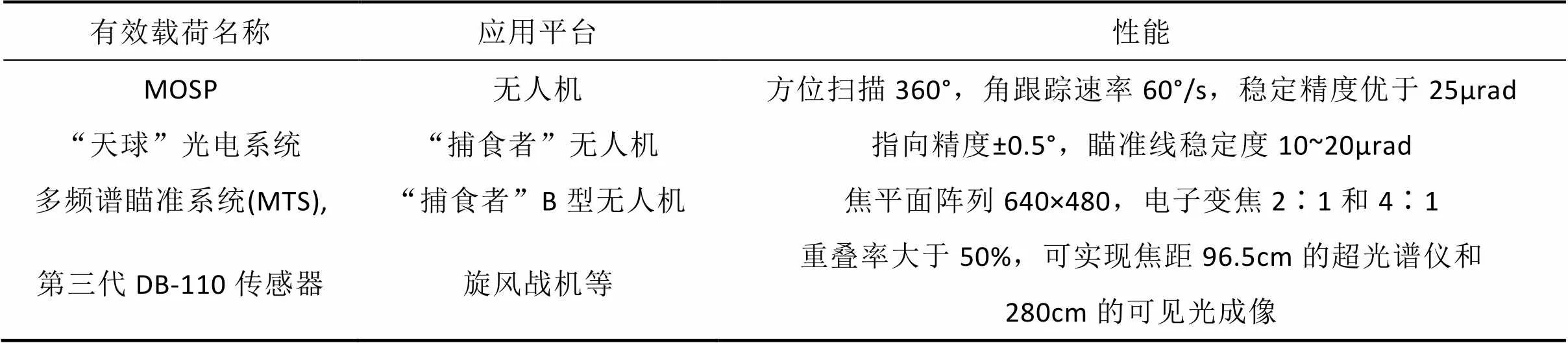
表7 机载光学探测应用实例
光学探测设备装载在卫星上具有大视野,其分辨率从几十米到上千米不等,在低、小、慢目标的观测上,观测精度不够。机载光学探测分辨率高,但平台驻留时间过短,限制了探测效率。临近空间慢速飞行器在空中运动缓慢,耗能低,自身辐射小,光学探测频谱宽,而目前隐身飞机一般是在某个方向上减小雷达反射面,不能在所有频谱、所有方向都实现隐身,比如飞机背面,因此,飞行高度高于绝大多数飞机的临近空间慢速飞行器在对隐身飞机的探测和预警方面大有可为。
国外在临近空间慢速飞行器上应用光学探测设备的有美国Combat Sky Sat计划,使用临近空间高空气球携带光学成像系统对地面进行探测,累计飞行时间已超过25 000h。国内对使用临近空间慢速飞行器挂载光学传感器进行探测的研究有:梁国龙等通过分析临近空间的光谱特性,提出了临近空间光学探测的硬件指标[17];顾明剑基于对菲涅尔反射定律的研究构建了一种高分辨率临近空间偏振成像系统[18];卢雪分析了使用临近空间慢速飞行器进行探测时大气环境因素和可见光、红外自身的光谱特性[19]。这些研究对近地目标和低空目标的辐射特性进行了分析,将目标辐射等效为太阳辐射,论证了在临近空间慢速飞行器上使用可见光相机和红外相机进行探测可行性。
1.3 通信中继有效载荷
目前实际应用的通信中继按照其搭载平台不同,可以分为星载通信中继、地面固定通信中继、车载移动通信中继和目前新兴的无人机通信中继[20],其中以星载通信中继和地面固定通信中继为主。星载通信中继,如泰国2005发射的IPSTAR-1,美国SpaceWay-F3通信卫星等,覆盖范围广,为保障区域全天候通信,需要多卫星组网工作;以地面发射塔为平台的地面通信,受地形地貌遮挡,单个地面站覆盖范围小,需要建造大量地面信号塔,保障信号畅通。两者均有成本高昂,工程周期长的缺点。
临近空间慢速飞行器长期驻留、离地面距离适中、飞行平稳,是理想的通信中继平台,如图1所示。本文所指的临近空间慢速飞行器通信中继平台主要是指位于平流层的浮空器平台,这是由于这个高度下气流平稳,风力和风向对平台影响小,维持平台稳定所需的能量少,太阳辐射低,无需在设备外额外添加保护层,信号不受地形地貌的影响,覆盖范围大,信号衰减较小,部署成本低。2011年7月,作为“HAA”项目的验证艇“HALE-D”的首飞试验成功,验证了平流层飞艇用于战场监视及数据中继[21]的一系列技术。
在临近空间慢速飞行器上部署通信中继设备,单个慢速飞行器上的通信中继可保障某一定范围内的通信,部署在多个慢速飞行器上通信中继组网,可实现较大区域的通信覆盖,综合化中继系统如图2所示。以成本较低的高空气球为代表的临近空间慢速飞行器作为通信中继平台,考虑到其载质量能力,要求有效载荷质量轻,通信中继的集成化对于临近空间通信中继的广泛使用,有重要的意义。临近空间慢速飞行器使用综合化中继系统,将通信中继的天线、信号处理、信号传输等模块集成化,节省能量的消耗,以便通信中继和供电电池体积和质量最小化。
图1 临近空间慢速飞行器通信中继示意
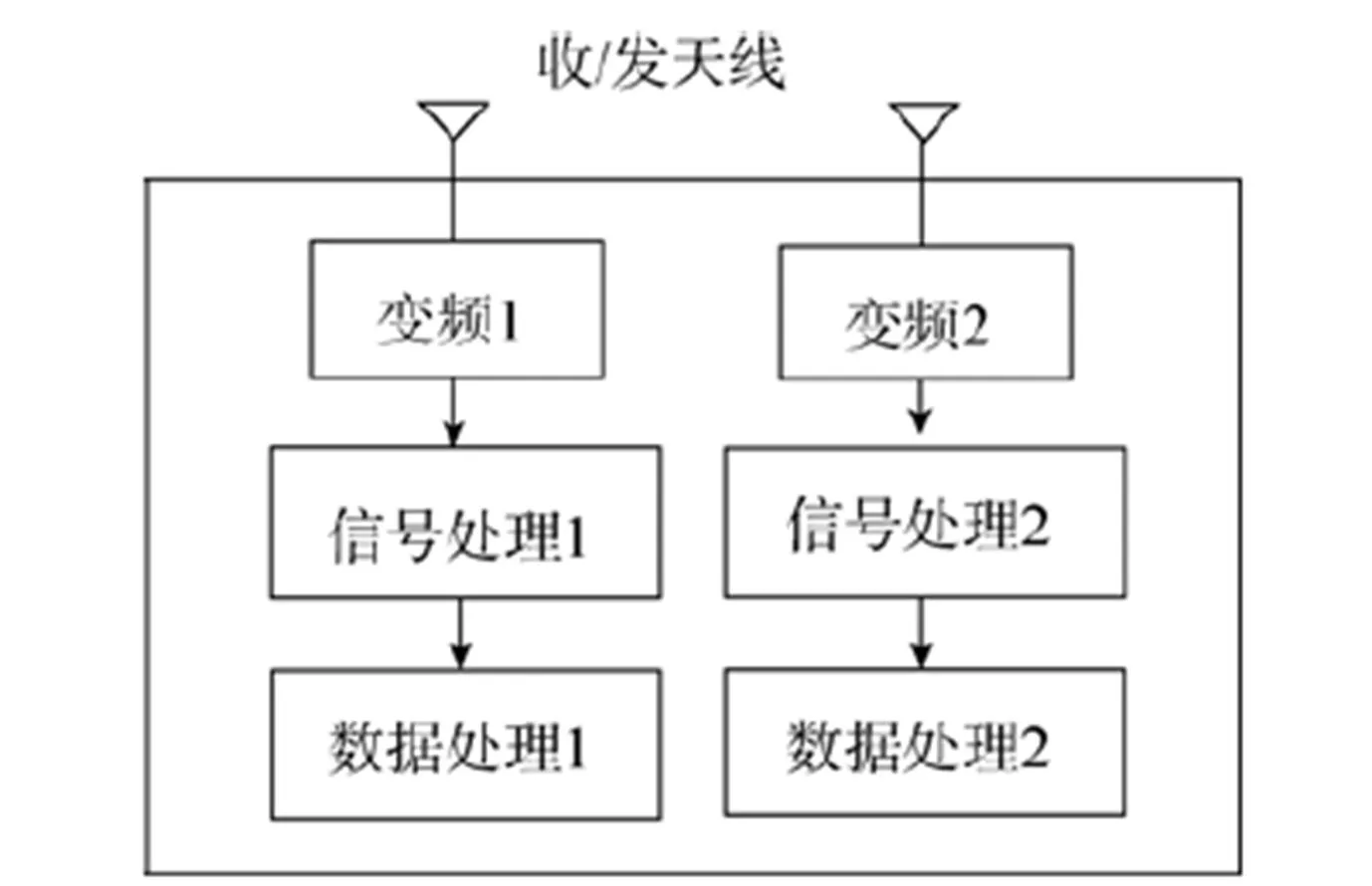
图2 综合化中继系统
相比以地面基站为平台的通信中继,临近空间慢速飞行器通信中继具有通信距离远、覆盖范围广、受地面遮挡影响小等优势[22]。
1.4 武器有效载荷
现代战争由软杀伤和硬杀伤两个部分构成,软杀伤主要是指对敌进行电子攻防,削弱敌方战斗力,硬杀伤是指对敌进行物理上的直接打击,消灭敌方战斗力。
电子攻防包括干扰、防护、欺骗、致盲、警告、电磁摧毁等方面。通过携带电子干扰设备,发射电磁信号,干扰敌方的通信信号和制导定位信号,发送欺骗信号、警告信号甚至直接摧毁敌方电磁系统,降低敌作战效能,如2012年伊朗宣布捕获美无人机[23]是典型的电子攻防应用。
机载电子干扰吊舱作用频率为2~20GHz,响应时间短,当飞机高度为500m时,有效干扰范围可达一百千米至数百千米,可以大幅度削弱敌方战斗力[24]。飞机从接收到敌方来犯的信息到飞机起飞开启电子攻防系统需要一定的响应时间。典型机载电子干扰吊舱如表8所示。
表8 典型机载电子干扰吊舱

Tab.8 Typical airborne electronic jamming pod
临近空间慢速飞行器在空中长期驻留,挂载电子干扰吊舱可在战争开始的第一时间启动电子攻防,且平台高度是临近空间慢速飞行器天然的防护盾牌,干扰吊舱遭到破坏的概率小,有低成本、长寿命、高可靠的优势。考虑到电子吊舱机构复杂,质量从几十千克到数百千克不等,尺寸较大,电子干扰吊舱在临近空间适用于部分负载能力较大的高空气球的临近空间飞艇。
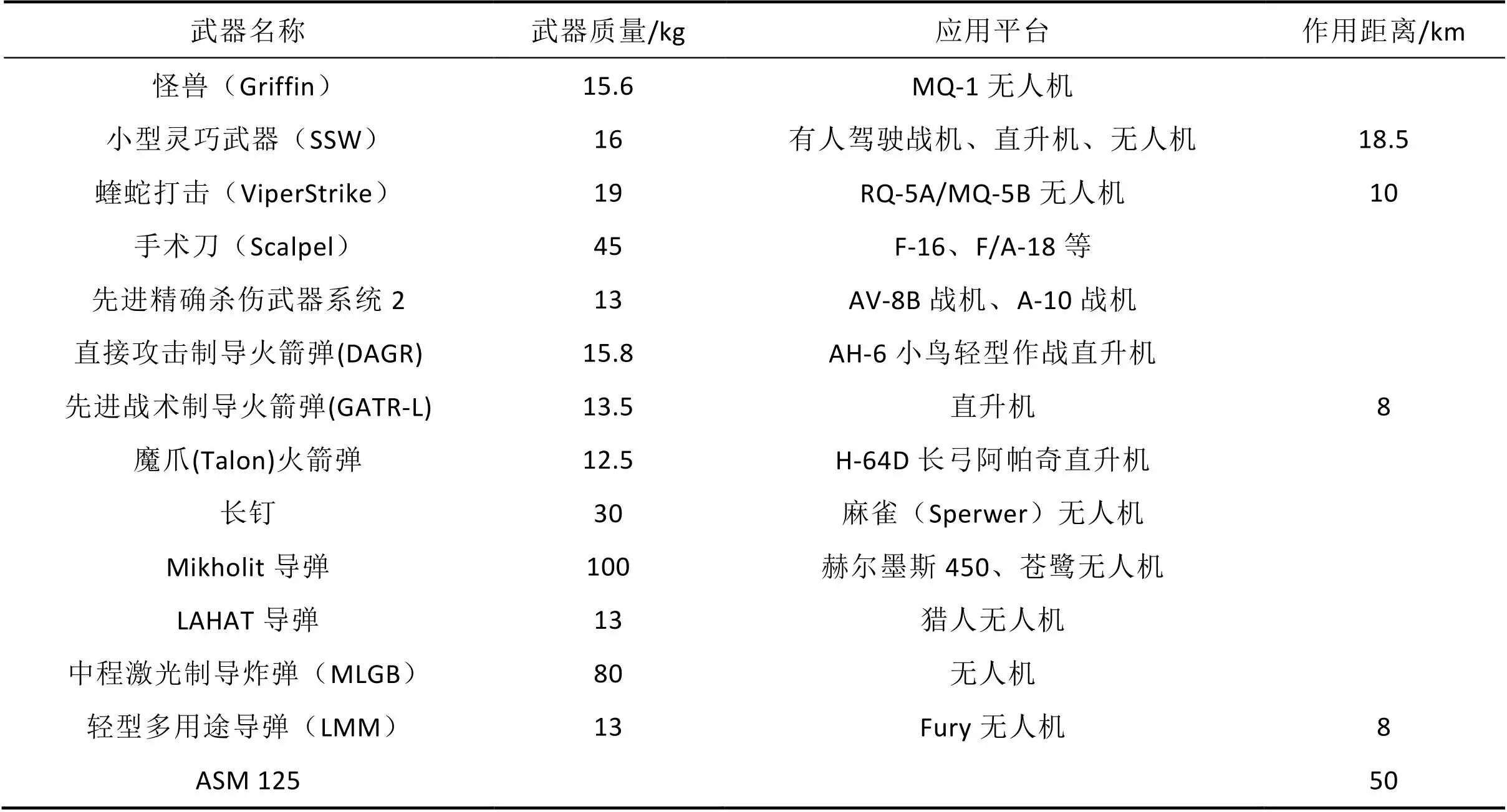
直接打击敌方目标,对敌进行物理上的伤害是作战的主要手段。随着无人机的发展,一系列小型化、轻型化武器快速发展[25],机载制导弹药如表9所示。
表9 机载制导弹药
Tab.9 Airborne guided munitions
临近空间慢速飞行器挂载武器作战相对于航天武器更具有及时性、经济性、便捷性[26],作为地面和机载武器的高空支援,有力地完善了海陆空天一体化攻防体系。美军联合司令部实施的“阿尔法”计划和“施里弗”模拟演习,就是利用临近空间飞行器的高度优势,将其应用于一体化作战的典型代表。临近空间慢速飞行器作为直接杀伤性武器的搭载平台,可以携带小型炸弹、反导导弹、临近空间慢速飞行器激光武器和地基激光武器中继镜等。
1)小型炸弹。高空气球等临近空间慢速飞行器受负载能力的限制,可以携带质量较轻的小型炸弹直接打击目标。目前应用于无人机上的美国雷锡恩公司研制的小型炸弹“怪兽”、魔爪火箭弹,洛克希德·马丁公司生产的SSW,以及2007年出现在伊拉克战场的蝰蛇打击滑翔炸弹,质量均不超过20 kg,攻击距离大于10 km。满足临近空间慢速飞行器的作战需求,适用于临近空间慢速飞行器对低于临近空间的飞行器、导弹进行拦截、打击。
2)反导导弹。武器打击能力与其战斗部质量密切相关,战斗部质量越大,打击能力越强,在飞行器负载能力允许的情况下,应尽量选择打击能力强的武器。临近空间飞艇体积和负载能力远大于浮空气球,可装备反导导弹武器。装备在大中型无人机上的以色列长钉增程型、Mikholit导弹、LAHAT导弹、中程激光制导炸弹(MLGB),美国的海尔法、联合空地导弹(JAGM)等战斗部质量大于小型炸弹,作战能力强于小型炸弹,作用距离满足临近空间飞艇等临近空间慢速飞行器的作战需求,可以实现对敌的有效打击。
3)激光武器。临近空间激光武器是空中作战和防御的有效手段[27]。临近空间慢速飞行器搭载激光瞄准装置,跟踪和测距,携带化学激光器用于直接攻击目标,如图3所示。
当临近空间慢速飞行器负载能力较低时,无法搭载直接攻击目标的化学激光武器,可以在慢速飞行器上携带用于瞄准和测距的红外装置和激光中继装置,使用激光中继镜,反射地面激光武器发射的激光用于打击敌方目标,如图4所示。

图3 激光武器直接打击目标

图4 激光武器间接打击目标
目前美军正在研究的应用于机载的激光计划(ABL)是能实现对目标直接物理摧毁的武器系统,实现在12 km高空、对前方90 km的正方一侧巡航,预定射程为300~580 km。可以作为临近空间慢速飞行器激光武器的借鉴。
临近空间慢速飞行器有效载荷,相对于卫星和飞机,由于其搭载平台具有高于对流层飞机、低于卫星的理想高度和在运动速度慢、固定区域长期驻留的特点,有效载荷作用距离需满足临近空间的高度,作用距离适中;对于随慢速飞行器驻留长时间工作的载荷,如观测、通信类载荷,还应具有耗能较低,能够长时间工作的特点;对于应用于高空气球这类负载能力小的临近空间慢速飞行器,有效载荷应具有集成化和小型化的特点。
2 发展趋势
近年来对临近空间的开发越来越重视,从临近空间慢速飞行器的位置条件和负载能力的角度看,临近空间慢速飞行器有效载荷在设计、生产时其发展方向应有以下几个趋势:
1)有效载荷作用距离更远。相比应用在地面和对流层飞机上的同类型设备,由于临近空间与地面的距离大于20 km,临近空间慢速飞行器上挂载的对地面或低空目标进行观测、通信或打击时,临近空间慢速飞行器有效载荷如雷达、光学相机、通信中继、武器等有效载荷的作用距离应满足其挂载的临近空间慢速飞行器所处高度的应用需求,保障观测的分辨率、保障信号经远距离传播后强度和保障武器装备的打击距离和打击精度。
2)有效载荷能耗更低。临近空间慢速飞行器有效载荷随高空气球、飞艇等临近空间慢速飞行器拥有长期驻留在固定区域,在平台携带能源和平台对环境能源利用能力有限的情况下,能耗越低的有效载荷随长时间驻留的临近空间慢速飞行器有效工作时间越久,实用价值越大。
3)有效载荷设备小型化。临近空间慢速飞行器有效载荷由于其平台负载能力从几千克到几十千克不等,无法挂载质量和尺寸过大的设备,而目前性能优良的地面设备或机载装备,质量和尺寸普遍较大,难以作为慢速飞行器有效载荷使用,因此临近空间慢速飞行器有效载荷研发时,应虑设备质量的轻型化,设备功能的集成化和设备尺寸的小型化。
3 结束语
临近空间在高度上和大气环境上有着理想的位置优势,临近空间慢速飞行器因其具有成本低廉、时效快捷、风险较低的特点,在多领域有广泛的应用价值,越来越受到重视。飞行器挂载合成孔径SAR、可见光传感器、红外传感器、通讯中继系统等可以用于探测、通讯和作战侦查、防御;搭载电子攻防系统和攻击性武器可以在高角度、大视野下削弱敌方战斗力。但是由于高空气球、飞艇等临近空间慢速飞行器在释放方式和长期驻留上有诸多技术难关需要攻克,此外,我国幅员辽阔,地形复杂,在临近空间慢速飞行器有效载荷的跟踪与回收技术上也需要突破一些关键技术。本文通过对国内外应用于飞机和卫星上的探测、通信、打击有效载荷的概述,总结了现有设备在临近空间慢速飞行器上应用的可行性和优势,分析了临近空间慢速飞行器有效载荷的发展趋势,可为临近空间慢速飞行器有效载荷的应用和发展提供参考。
[1] 钱维宏, 林祥. 大气结构和动力[J]. 现代物理知识, 2011(2):67-74.
QIAN Weihong, LIN Xiang. Atmospheric Structure and Dynamics [J]. Modern Physics, 2011 (2): 67-74.(in Chinese)
[2] 吴耀, 姚伟, 王超, 等. 一种利用自然能飞行的临近空间浮空器研究[J]. 航天返回与遥感, 2015, 36(3): 20-25.
WU Yao, YAO Wei, WANG Chao, et al. Use of a near Space Vehicle on [J]. Spacecraft Recovery & Remote Sensing, 2015, 36(3): 20-25.(in Chinese)
[3] 李焱, 才满瑞, 佟艳春. 临近空间飞行器的种类及军事应用[J]. 中国航天, 2007(10):39-44.LI Yan, CAI Manrui, TONGYanchun. Near Space Vehicle Types and Military Application of [J]. Aerospace China, 2007 (10): 39-44.(in Chinese)
[4] 张健, 葛新. 高空平台发展情况综述[C].卫星通信学术年会, 2016.
ZHANG Jian, GE Xin. Overview of Development of High Altitude Platform [C].Annual Conference on Satellite Communications,2016.(in Chinese)
[5] 吴洋. 临近空间太阳能无人机飞行平台的特点及发展前景[J]. 科技创新导报, 2016, (33): 11-13.
WU Yang. Characteristics and Development Prospects of near Space Solar Powered Unmanned Aerial Vehicle Flight Platform [J]. Science and Technology Innovation Herald, 2016, (33): 11-13.(in Chinese)
[6] 张大炜. 机载SAR实时处理技术和FMCW-SAR成像的研究[D]. 中国科学院研究生院(电子学研究所), 2007.ZHANG Dawei. Research on Airborne SAR Real-time Processing Technology and FMCW-SAR Imaging [D]. Graduate University of Chinese Academy of Sciences (Institute of Electronics), 2007.(in Chinese)
[7] 林晓烘. 星载合成孔径雷达干扰与抗干扰技术研究[D].国防科学技术大学, 2014.LIN Xiaohong. Research on Jamming and Anti-jamming Technology of Spaceborne SAR [D]. National University of Defense Technology, 2014.(in Chinese)
[8] LI Z, WU J, LI W, et al. One-Stationary Bistatic Side-Looking SAR Imaging Algorithm Based on Extended Keystone Transforms and Nonlinear Chirp Scaling[J]. IEEE Geoscience & Remote Sensing Letters, 2012, 10(2): 211-215.
[9] GASSON J, HUGHES D, POULTER M, et al. Development of an Ultra Wide-band SAR for Minefield Detection[C]. IEEE 1999 InternationalGeoscience& Remote Sensing, 1999,5(5): 2474-2476.
[10] 王晓峰. 临近空间慢速平台SAR运动补偿技术研究[J].国防科学技术大学, 2007.
WANGXiaofeng. Research on SAR Motion Compensation Technology in near Space Slow Platform [J]. National University of Defense Technology, 2007.(in Chinese)
[11] 王岩飞, 徐向辉, 刘畅, 等. 用于地面目标微波特性测量的飞艇SAR系统[J]. 电子与信息学报, 2010, 32(1): 28-31.WANGYanfei, XUXianghui, LIU Chang, et al. Airship SAR System for Measuring Microwave Characteristics of Ground Targets [J]. Journal of Electronics &InformationTechnology, 2010, 32 (1): 28-31.(in Chinese)
[12] 杨海光, 易青颖, 李中余,等. 临近空间慢速平台SAR地面动目标检测与成像[J]. 电子科技大学学报, 2014, 43(6): 838-844.
YANGHaiguang, YIQingying, LIZhongyu, et al. Ground Moving Target Detection and Imaging in Slow Space Platform SAR. Journal of [J]. Journal of University Electronic Science and Technology of China, 2014, (6): 838-844.(in Chinese)
[13] 左伟华, 皮亦鸣, 闵锐. 临近空间慢速平台SAR快速成像模式研究及算法研究[J]. 信号处理, 2014, (7): 789-796.ZUOWeihua, PI Shengming, MINRui. Research and Algorithm Research of SAR Fast Imaging Mode for near Space Slow Platform [J]. Journalof Signal Processing, 2014, (7): 789-796.(in Chinese)
[14] 杨海光. 临近空间SAR成像理论与成像方法研究[D]. 电子科技大学, 2014.YANGHaiguang. Research on near Space SAR Imaging Theory and Imaging Method [D]. University of Electronic Science and Technology of China, 2014.(in Chinese)
[15] 李潭,沈中, 宁蔚. 环境与灾害监测光学有效载荷发展综述[J]. 航天返回与遥感, 2010, 31(6):31-38.LITan, SHEN Zhong, NING Wei. The Development of Environmental and Disaster Monitoring Optical Payload Development [J]. Spacecraft Recovery & Remote Sensing, 2010, 31(6): 31-38.(in Chinese)
[16] 成刚, 杨随虎. 无人机机载光电系统综述[J]. 应用光学, 2005, 26(4):1-4.CHENG Gang, YANGSuihu. Overview of UAV Airborne OptoElectronic Systems [J]. Journal ofAppliedOptics, 2005, 26(4): 1-4.(in Chinese)
[17] 梁国龙, 何昕, 魏仲慧,等. 临近空间目标飞行器地基探测技术研究[J]. 红外, 2013, 34(7): 1-4.LIANGGuolong, HE Xin, WEIZhonghui, et al. Research on Ground Detection Technology for near Space Target Aircraft [J]. Infrared, 2013, 34 (7): 1-4.(in Chinese)
[18] 顾明剑. 临近空间高分辨率偏振成像仪[J]. 红外, 2010, 31(3): 1-5.GUMingjian. The near Space High Resolution Infrared Polarization Imaging Instrument [J].Infrared, 2010, 31 (3): 1-5.(in Chinese)
[19] 卢雪. 临近空间低速目标光学探测分析[J], 2014.(in Chinese)LUXue. Optical Probing Analysis of Low Velocity Target near Space [J], 2014.
[20] 吴飞龙, 林韩, 汤明文, 等. 多种中继方式在大型无人机输电线路巡检中的应用[J]. 中国电力, 2015, 48(2): 104-110.WUFeilong, LIN Han, TANGMingwen, et al. Application of Multiple Relay Methods to Patrol Inspection of Large Unmanned Air Vehicle Transmission Lines [J]. Electric Power, 2015, 48 (2): 104-110.(in Chinese)
[21] 王明月. 美国高空长航时飞艇验证艇完成首飞[J]. 装备学院学报, 2011, (5): 29-29.WANGMingyue. American High Altitude Long Endurance Airship. Completed Flight. First Flight. Journal of [J]. JournalofEquipment Academy, 2011, (5): 108-108.(in Chinese)
[22] 杨伟. 一种基于浮空平台的通信系统应用[J]. 通信与信息技术, 2010, (4): 72-74.YANG Wei. A Floating Platform Communication System Based on [J]. Communication &Information Technology, 2010 (4): 72-74.(in Chinese)
[23] 韩超, 贾剑, 周磊. 从伊朗俘获美军无人机事件看GPS干扰[J]. 电信技术研究, 2012(1):60-63. HAN Chao, JIA Jian, ZHOU Lei. View of the American Drone Incident Captured from Iran. GPS Interference, [J]. Research on TelecommunicationTechnology, 2012 (1): 60-63.(in Chinese)
[24] 谭显裕. 国外机载电子干扰吊舱的现状及发展[J]. 航空兵器, 2003(6):33-35.TANXianyu. Status and Development of Airborne Electronic Jamming Pod Abroad. [J]. Aero Weaponry, 2003 (6): 33-35.(in Chinese)
[25] 胡冬冬, 何煦虹. 国外新一代机载小型精确制导武器发展现状及趋势[J]. 飞航导弹, 2010, (8): 17-25.HUDongdong, HEXuhong. The Status Quo and Development Trend of Foreign New Generation of Small Airborne Precision Guided Weapon [J].Aerodynamic Missile Journal, 2010(8): 17-25.(in Chinese)
[26] 刘鹏, 盛怀洁, 廖明飞. 浮空器优势分析及其军事应用[J]. 飞航导弹, 2011, (9): 84-87.LIU Peng, SHENGHuaijie, LIAOMingfei. Analysis of the Advantages and Application of Military Aerostat [J].Aerodynamic Missile Journal, 2011, (9): 84-87.(in Chinese)
[27] 赵江, 徐世录. 激光武器的现状与发展趋势[J]. 激光与红外, 2005, 35(2): 67-70.ZHAO Jiang, XUShilu. The Current Situation and Development Trend of Laser Weapon [J]. Laser & Infrared, 2005, 35 (2): 67-70.(in Chinese)
(编辑:刘颖)
Overview of Near Space Slow Vehicle Loads
ZHANG Kaihua1JIANG Yi2LIAO Jun2
(1 Shanghai Academy of Spaceflight Technology, Shanghai 201100, China)(2 Central South University, School of Aeronautics and Astronautics, Changsha 410006, China)
With the traction of economic and military needs and the progress of science and technology, the near space slow vehicle are pasd extensive attention due to its excellent resident ability and the advantages of ground observation, communication, and strike. This paper analyzed the advantages in the effective working time, cost and equipment work effect of the near space slow vehicle relative to the satellite and the space shuttle according to combining with the stratosphere near space without clouds, rain, snow, fog interference meteorological characteristics and the height between 20 km-100 km from the surface. The near space slow aero craft constraint and near space slow vehicle categories are discussed, according to the payload types and payload performance requirements and motion characteristics of the near space slow vehicle, the load of the near space slow vehicle is demonstrated by comparing the actual application of the current aircraft and satellite loads. This paper focused on feasibility and advantages of the SAR radar, infrared, visible light loading, communication relay loading, weapons on near space slow vehicle, analyzed the development trend of the near space slow spacecraft payload, provided references for the near space slow spacecraft payload and application selection of payload application in near space slow vehicle.
communications relay; SAR; electronic attack and defense; near space
V19
A
1009-8518(2017)06-0001-10
10.3969/j.issn.1009-8518.2017.06.001
张凯华,女,1978年生,工程硕士,高级工程师,主要研究方向为飞行器总体设计与导航制导与控制。E-mail: kaihua_zhang@hotmail.com。
蒋祎,女,1993年生,2015年获中南大学电子信息科学与技术专业学士学位,现为中南大学航空宇航科学与技术专业在读硕士研究生,研究方向为飞行器总体设计。E-mail:jiangyi_002@163.com。
2016-12-03
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
军民两用技术与产品(2021年12期)2021-03-09
北京航空航天大学学报(2020年3期)2021-01-14
航天工业管理(2020年3期)2020-07-25
太空探索(2020年5期)2020-05-19
火力与指挥控制(2019年12期)2019-02-14
学苑创造·C版(2018年7期)2018-08-08
科学与技术(2018年23期)2018-06-17
小朋友·快乐手工(2015年5期)2015-06-06