
混联自稳跟踪平台及控制系统设计与试验
2018-01-18 09:20陈立坡
农业工程学报 2018年1期
陈立坡
(中国人民解放军92785部队, 秦皇岛 066200)
0 引 言
在外出航海时,海上天气变化莫测,在遇到恶劣天气时,舰船会产生一定幅值与频率的多维耦合波动[1],给舰载仪器设备带来干扰,严重阻碍各种高精密仪器的使用。为提高舰船的作战能力,能够在风雨大浪等恶劣航海环境中保持优良的作战水准,需要一个自稳平台来隔离海浪波动带来的影响,为各种舰载设备提供一个自稳的架设平台[2-3]。同时针对大范围舰载雷达跟踪任务,又需要雷达架设平台能够实现较大范围的方位与俯仰转动。另外渔民在海上作业时,由于渔船的摇摆波动,给渔民工作能力带来了一定的影响,有时甚至造成生命危险;还有在山地上工作的农业机械设备,由于地面高低不平,使设备的工作效能大大降低。如何有效抵抗无规律的干扰,达到高精度与高动态响应于一体的自稳跟踪系统是研究人员的一大热难点。
自稳平台一般采用角度、速度和加速度等传感器[4-9],实时检测横摇、纵摇等信息,控制自稳平台运动来隔离外界的扰动,提供一个自稳的平台。目前大多数自稳平台搭载负载较轻,体积较小[10-12],因此结构上一般采用算法比较简单的串联结构[13-14],控制系统实现也比较容易。相比之下,并联机构具有刚度好、承载力大、机构紧凑等特点,已逐步成为自稳平台的主要研究方向[15]。但是由于控制算法复杂,伺服系统的实时性差,严重制约了并联机构自稳平台的进一步发展。并联机构自稳平台控制算法有基于运动学和动力学2种[16],基于运动学的控制算法主要依据自稳平台的运动学模型,通过位置反解计算出各个支链的位置输出,实现起来比较简单[17-24]。本文提出了一种五自由度具有2层结构的自稳跟踪平台。上层为两自由度的跟踪平台,采用串联式U-U结构,即U型外框绕外环轴(铅垂)旋转,U形内框绕内环轴(水平)旋转;下层为三自由度的自稳平台,采用并联式3UPS/PU组成,3个UPS为驱动分支,中间PU为约束分支。
1 自稳跟踪平台结构
1.1 跟踪平台结构
跟踪平台主要是为了保证电视跟踪设备实时对准某一动态目标,需要的方位转角较大(-170°~+170°),并且目标与跟踪平台都在海平面上,高度差相差不是很大,因此俯仰转角不是很大(-10°~+30°)。为了控制方便,采用了串联式采用U-U结构,即U型外框绕外环轴(铅垂)旋转,U形内框绕内环轴(水平)旋转(图1)。
内环U型框架两端分别安装一组四点接触球轴承,2组轴承的内圈分别与内环U型框架两端联接(图2);另外,轴承组件内圈的另一个端面分别与过渡轴联接,左端过渡轴联接减速机构,右端过渡轴联接角度编码器,部件构成内环轴系。外环U形框架用螺钉固定在四点接触球轴承内圈上端,转子通过螺钉与外环主轴轴端联接。外环主轴通过轴承支撑在底座上,并通过减速机构驱动外环轴系转动。通过固定在主轴下端角度传感器反馈外环主轴的角位置。

图1 跟踪平台外形图Fig.1 Outside view of tacking platform
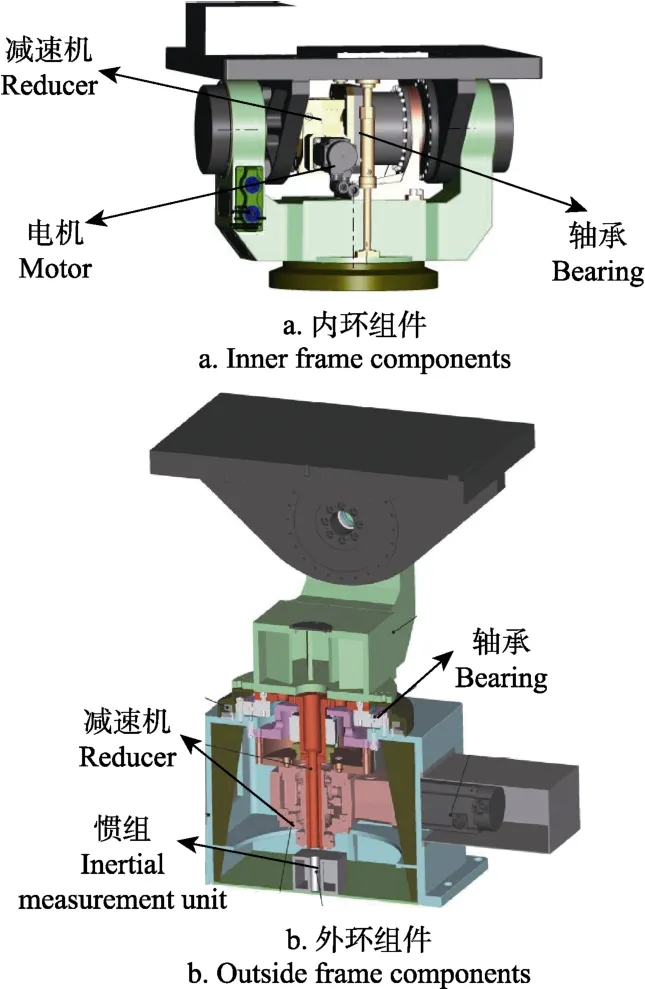
图2 组件示意图Fig.2 View of components
1.2 自稳平台结构
考虑到电视跟踪设备的质量约为 200 kg,而设计的跟踪平台质量>300 kg,则自稳平台有效载重>500 kg,因为并联机构具有刚度好、承载力大和机构紧凑的特点。其实3UPS/PU机构和3UPS/S机构均满足上述运动要求,若采用3UPS/S机构,工作过程中上平台中心点位置不变,即UPS分支必然会伸长到其行程的一半,自稳平台整体最低高度较大。而3UPS/PU机构的上平台中心点位置可以变化,其处于最低位时,UPS分支缩到最短,可以降低自稳平台整体最低高度,在舰船上由于摇摆的原因,高度越低可靠性、安全性越高,因此自稳平台采用3UPS/PU组成,3个UPS为驱动分支,驱动部件为电动缸,中间PU为约束分支(图3)。

图3 自稳平台示意图Fig.3 View of stabilized platform
2 自稳跟踪平台控制系统设计
自稳跟踪平台主要包括 2方面主要功能,一是自主引导功能,主要是保证电视跟踪设备实时跟踪动态目标;二是自稳功能,主要是克服舰船摇摆的影响,保证电视跟踪设备实时处在一个平稳的工作平面上,下面主要对这两个功能进行简要的设计。
2.1 跟踪平台控制系统设计
2.1.1 跟踪平台控制原理
在跟踪平台外环U形框内安置一套惯组系统,可以动态获取跟踪平台的经度、纬度和高度信息M(B1,L1,H1)和跟踪平台方位转角为 0°时的真北角 φ,在跟踪目标上安装GPS信号源,通过无线网络将目标的经度、纬度和高度信息N(B2,L2,H2)传递至跟踪平台计算机,通过引导解算方法,计算出要保证电视跟踪设备对准跟踪目标,跟踪平台的应转动的方位和俯仰角度,然后分别控制外框和内框轴转动相应角度(外框和内框轴分别实现跟踪平台的方位与俯仰转动),达到动态跟踪的目的。

图4 跟踪平台系统控制框图Fig.4 Control block diagram of tacking platform
2.1.2 跟踪平台引导算法
1)将地球坐标系的经度、纬度和高度信息转换成空间直角坐标系的坐标[24]
地球上任一点的大地坐标系与相应的空间直角坐标的关系为

式中大地坐标系一点(W,Q,H);W 表示经度,(°);Q表示纬度,(°);H表示高度,m;相应的直角坐标系坐标(X,Y,Z),e为地球第一偏心率,a为地球长半轴长度,m;b为地球短半轴长度,m;K为卯酉圈曲率半径,m。通过式(1)‒(3)式可以把跟踪平台的经纬高值信息M(W1,Q1,H1)和 目标的经度、纬度和高度信息N(W2,Q2,H2)转换成相应的直角坐标系坐标(X1,Y1,Z1)和(X2,Y2,Z2)。
2)以跟踪平台为原点,推导动态目标在大地空间直角坐标系中的坐标

式中(X12,Y12,Z12)为动态目标在以跟踪平台为原点的大地空间直角坐标系,把上节计算出的数值代入式(4)中,可求出(X12,Y12,Z12)。
3)以跟踪平台为原点,推导动态目标在大地站心极坐标中的大地天顶距θ和大地方位转角ω

式中S12为跟踪平台与动态目标之间的距离,m。
4)计算出跟踪转台外框方位转角α和内框俯仰转角β

式中ξ为此时的方位转角,υ为此时的俯仰转角,φ为跟踪平台方位转角为0°时的真北角。
2.2 自稳平台控制系统设计
2.2.1 自稳平台控制原理
自稳平台主要作用就是抑制动基座产生的扰动,为跟踪转台提供较为自稳的平面。自稳平台具有横摇和纵摇 2个方向的运动,由安装在自稳平台上的敏感元件感知舰船的横摇、纵摇姿态等参数,这些运动参数传输给运动控制计算机,运动控制计算机通过实时运动学解算,得出电动缸运动量并生成控制指令。该控制指令由伺服控制单元经过信号调理后输出,驱动伺服系统运动实现所期望的运动姿态。同时,伺服控制单元实时采集电动缸的位移等参数,实现自稳平台的监测与保护,并对各种信息进行显示,控制原理图如图5所示。

图5 自稳平台系统控制框图Fig.5 Control block diagram of stabilized platform
2.2.2 自稳平台运动学反解算法
运动学反解定义:根据已给的满足工作要求的末端执行器相对参考坐标系的位置和姿态,求各关节的运动参数。具体该自稳平台而言,就是当传感器检测到舰船有横纵摇摆信息时,求解出3个UPS分支实际伸缩量,以达到保证上平面水平的目的,自稳平台简易坐标系如图6所示。

图6 自稳平台坐标系Fig.6 Coordinate system of stabilized platform
为了方便,基准坐标系建立在上平台上,以中心为原点,以垂直向上为Z方向,已过B1点为X方向,动坐标系 P建立在下平台上,以中心为原点,以垂直向上为zp方向,已过A1点为xp方向。采用RPY角分析方法,绕X轴旋转σ角,绕Y轴旋转λ角,PU分支起到约束绕Z轴旋转的作用,因此绕Z轴旋转为0°,则旋转矩阵表示为

ai和 bi分别表示 Ai和 Bi(i=1,2,3)在基准坐标系下的坐标

3 样机试验
根据前文设计和控制分析,制作样机,如图8所示。为验证设计方案与控制方法的可行性,对混联自稳跟踪平台的运动性能进行了测试,分别测试了平台的跟踪精度、稳定频率及动态自稳精度。

图7 自稳跟踪平台样机Fig.7 Stabilized tracking platform’s prototype
3.1 试验设计
1)跟踪精度
混联自稳跟踪平台对目标的跟踪主要由俯仰轴与方位轴实现,对俯仰轴与方位轴的动态跟踪精度分别进行了试验测试。由于跟踪的动态目标在做0.5 Hz、5.1°幅值的正弦曲线运动,因此为了更好的贴近实际使用环境,设计试验时采用其他某一机构带动动态目标做正弦曲线运动,同时控制系统控制跟踪平台俯仰与方位轴的转动,并用编码器反馈实时记录 2轴的实际角度。同时采用不同频率的正弦曲线作为目标跟踪曲线可以获得转台在不同海况下的动态跟踪性能。分别选用0.1~0.6 Hz之间不同频率、幅值均为 5.1°幅值的正弦曲线作为目标跟踪曲线,分别测量跟踪转台俯仰轴和方位轴的幅值跟踪误差与相位滞后角度。
2)稳定频率
稳定频率主要是反映控制系统动态特性的重要指标,一般符合“双十标准”,即在控制软件上将自稳转台被测轴的运行模式设为正弦摇摆模式,采集得到平台实际输出曲线与输入曲线的幅值差不超过 10%,相移不大于10°。同时对自稳平台不同频率横摇和纵摇运动的幅值与相位滞后进行测量。在试验过程中,在自稳平台上平面安装传感器,通过计算机分别给自稳平台横摇、纵摇轴发送正弦摇摆指令,并通过传感器实时监测平台的运动状态,绘制出正弦摇摆指令曲线(期望角度曲线)和平台实测角度曲线,计算是否达到“双十标准”。
3)动态自稳精度
自稳跟踪平台的动态自稳精度主要用于测量平台处于舰载状态下自稳平台的长期自稳性。本节将自稳平台安装于用于模拟舰船摇摆的摇摆台上,将倾角传感器安装于自稳平台安装平面上。由于需要满足三级海况的要求,通过查找资料[24],海浪周期为 6~7 s,即 0.16~0.14 Hz,因此选择以频率0.1 Hz、幅值30°进行正弦摇摆,记录并保存倾角传感器输出的自稳平台安装平面实际摆动角度。控制摇摆台以不同的频率进行摇摆运动,测量稳定平台在不同频率下的动态稳定精度。
3.2 试验结果
由图8可知,俯仰轴最大跟踪误差为0.01°;相对误差2‰;方位轴最大跟踪误差为0.02°;相对误差4‰。在0.1~0.6 Hz频率内,随着目标跟踪曲线频率增大,俯仰轴和方位轴的幅值跟踪精度有所降低,相位滞后角度有所增大,但变化均不大,方位轴的跟踪精度略低于俯仰轴。
图9可知,自稳平台横摇摇摆运动幅值为1.504°,幅值误差为0.2%;跟踪角度时间滞后0.011 s,相位滞后为3.96°,因此自稳平台横摇能够较好的满足1 Hz的稳定频率。自稳平台纵摇摇摆运动幅值为 1.504°,幅值误差为0.2%;跟踪角度时间滞后0.013 s,相位滞后为4.68°,因此自稳平台纵摇也能够较好的满足1 Hz的稳定频率。在0.2~1.2 Hz频率内,随着目标跟踪曲线频率增大,稳定平台的横摇摇摆运动与纵摇摇摆运动的幅值有所增大,幅值精度有所减小,且相位滞后角度有所增大。这说明随着摇摆运动频率增大,稳定平台的性能有所减小,但在0.2~1.2 Hz频率范围内性能变化较小。
由图10可知,稳定平台横摇最大摆动角度为0.15°,且有轻微的波动;纵摇最大摆动角度为0.3°,摆动角度随摇摆台摆动而发生变化。在0.3 Hz频率范围以内,稳定平台横摇稳定性能略高于纵摇稳定性能。与现有自稳平台的精度相比,一般精度都在 1°左右[25-28],王立玲设计并串联光电稳定平台[29]精度约 0.3°,但是在空载的情况下,而本文设计的自稳平台负载500 kg,最低精度为0.3°。

图8 跟踪平台俯仰轴和方位轴跟踪角度曲线图Fig.8 Angle’s graph of the pitching axis and bearing axis of tracking platform
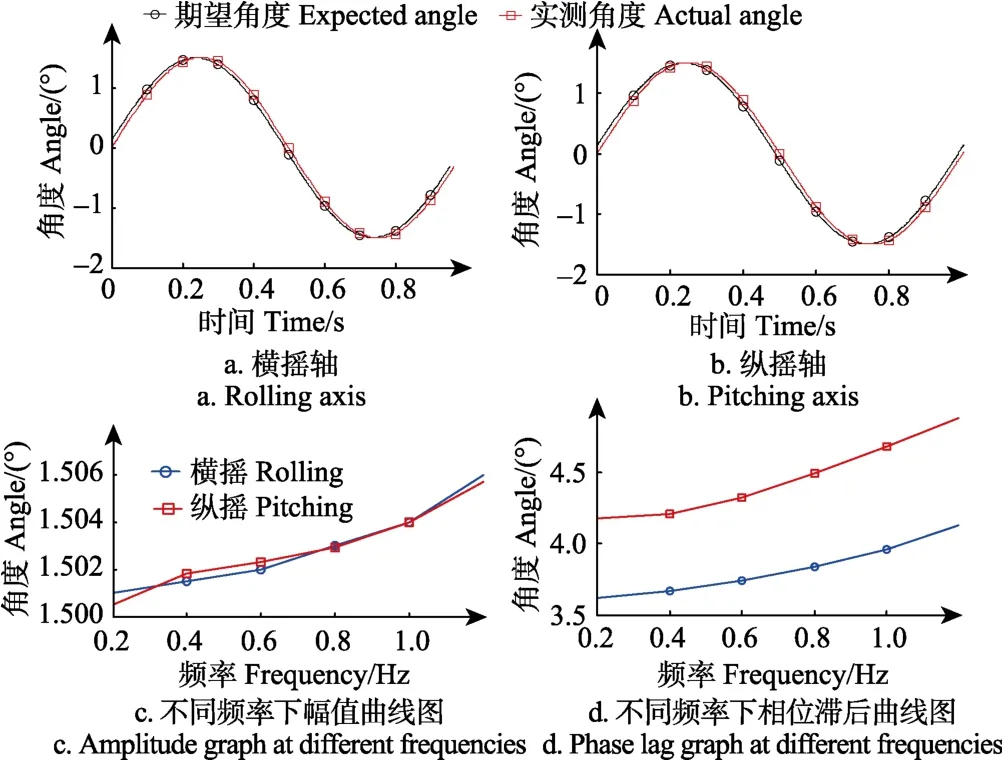
图9 自稳平台不同频率下摇摆幅值、相位曲线图Fig.9 Rolling and pitching amplitude and phase plots of the rolling axis and pitching axis of stabilized platform under different frequencies

图10 自稳平台横摇、纵摇轴动态稳定精度曲线图Fig.10 Dynamic stabilization accuracy plot of stabilized platform of rolling and pitching
4 结 论
本文自主设计了一种五自由度的舰载混联自稳跟踪平台,其中自稳平台采用并联式3UPS/PU结构,跟踪平台采用串联式U-U结构,并分别推导了自主引导控制算法和自稳平台运动学反解算法。
本文基于设计方案加工研制了真实样机,自稳跟踪平台跟踪精度优于 0.02°,相对误差优于 4‰;自稳平台的稳定频率优于1 Hz(双十,幅值1.5°);以频率0.1 Hz、幅值30°进行正弦摇摆时,动态自稳精度优于0.3°。
本文将跟踪功能和自稳功能相结合,可为渔船定点撒网、收网以及农作物精准种植、收割等设备的开发提供参考。
[1] Keller J A, Smith E C. Experimental and theoretical correlation of helicopter rotor blade-droop stop impacts[J].Journal of Aircraft, 1999, 36(2): 443-450.
[2] 罗二娟,牟德君,刘晓,等. 耦合型3自由度并联稳定平台机构及其运动特征[J]. 机器人,2010,32(5):681-687,694.Luo Erjuan, Mu Dejun, Liu Xiao, et al. A 3-DOF coupling parallel mechanism for stabilized platform and its motion characteristics[J]. Robot, 2010, 32(5): 681-687, 694. (in Chinese with English abstract)
[3] 马洁,杨鹏,李国斌. 高海情下船舶运动规律及减摇技术仿真研究[J]. 船舶工程,2006,28(2):24-28.Ma Jie,Yang Peng,Li Guobin. Simulation study of ship’s movement regularity and anti-rolling technology under highwave-level environment[J]. Ship Engineering, 2006, 28(2):24-28. (in Chinese with English abstract)
[4] Haned Khodadadi, Mohammad Reza Jahed Motlagh,Mohammad Gorji. Roust control and modeling a 2-DOF inertial Stabilized Platform[C]//IEEE International Conference on Electrical,Control and Computer Engineering, 2011, 7:223-228. (in Chinese with English abstract)
[5] 陈雨,赵剡,张同贺,等. 滚仰式捷联导引头跟踪原理与仿真[D]. 航空兵器,2010(5): 55-58,64.Chen Yu, Chen Yu, Zhang Tonghe, et al.Tracking principle and simulation for roll-pitch strap-down seeker.Aero weaponry,2010(5): 55-58, 64. (in Chinese with English abstract)
[6] 李少伟,施朝健,黄震民. 船载稳定水平平台系统[J]. 电子测量技术,2007,30(6):192-194.Li Shaowei, Shi Chaojian, Huang Zhenmin. Ship carried stable level platform sastem[J]. Electronic Measurement Technology,2007, 30(6): 192-194. (in Chinese with English abstract)
[7] 高翌阳,齐蓉,米月星. 舰载天线稳定平台伺服控制器研究[J]. 计算机测量与控制,2012,20(5):1301-1306.Gao Yiyang, Qi Yong, Mi Yuexing. Design of servo controller for shipborne antenna stabilized platform[J]. Computer Measurement & Control, 2012, 20(5): 1301-1306. (in Chinese with English abstract)
[8] 刘鹏,江雯,李越. 舰载稳定跟踪平台艏摇框架结构设计与模态有限元分析[J]. 宇航计测技术,2011,31(2):13-17,51.Liu Peng, Jiang Wen, Li Yue. Structural design and finite element modality analysis of yaw framework for carrierbased opto-electronic stabilizing platform on deck[J]. Journal of Astronautic Metrology and Measurement, 2011, 31(2):13-17, 51. (in Chinese with English abstract)
[9] 原晓刚. 稳定平台系统设计与控制[J]. 研究与开发,2012,31(9):40-43.Yuan Xiaogang. Stable platform for system design and control[J]. Research & Development, 2012, 31(9): 40-43.(in Chinese with English abstract)
[10] 毕永利,王连明,葛文奇. 光电稳定平台控制系统中数字滤波技术研究[J]. 仪表技术与传感器,2005(4):54-57.Bi Yongli, Wang Lianming, Ge Wenqi. Research on digital filter technique in control system of photoelectric stabilized platform[J]. Instrument Technique and Sensor, 2005(4): 54-57. (in Chinese with English abstract)
[11] Xue S, Cao G H, Fan H L, et al. Struture and dynamic characters of new radar stabilized platform[J]. Journal of China Ordnance, 2011, 4(4): 248-252.
[12] Zhou X, Zhang H, Yu R. Decoupling control for two-axis inertially stabilized platform based on an inverse system and internal model control[J]. Mechatronics, 2014, 24(8): 1203-1213.
[13] 刘义德. 基于并联机构的稳定平台建模与控制[D]. 哈尔滨:哈尔滨工业大学,2009.Liu Yide. Modeling and Control of Stabilized Platform Based on Parallel Mechanism[D]. Harbin: Harbin Institute of Technology, 2009. (in Chinese with English abstract)
[14] 吴晔,朱晓峰,陈俊山. 导引头二轴自稳定平台的轴角关系和简化[J]. 制导与引信,2012,33(1):1-5.Wu Ye, Zhu Xiaofeng, Chen Junshan. Axis-angle relationships and their simplifications in two-axis stabilized platform of radar seeker[J]. Guidance & Fuze, 2012, 33(1):1-5. (in Chinese with English abstract)
[15] 刘晓. 耦合型 3自由度并联稳定平台机构动力学分析[J].机械工程学报,2013,13(1):16-25.Liu Xiao. Dynamics analysis of a 3-DOF coupling parallel mechanism for stabilized platform[J]. Journal of Mechanical Engineering, 2013, 13(1): 16-25. (in Chinese with English abstract)
[16] 周结华,彭侠夫,仲训昱. 六轴船摇模拟转台及其方位稳定跟踪模型[J]. 船舶工程,2011,33(2):53-57.Zhou Jiehua, Peng Xiafu, Zhong Xunyu. Six-axis ship swaying simulation rotationtable and orientation stable tracking model[J]. Ship Engineering, 2011, 33(2): 53-57. (in Chinese with English abstract)
[17] 崔立廷. 一种海面定向天线自动跟踪系统[J]. 无线电通信技术,2016,42(3):55-58.Cui Liting. An automatic tracking system for ship-borne directional antenna[J]. Radio Communications Technology,2016,42(3):55-58. (in Chinese with English abstract)
[18] Ki Ho Kim, Jong Kwang Lee, Byung Suk Park, et al.Chatter-free sliding mode control for inertial stabilization of OTM(On-the-move)antenna driven by gear and flexible shaft[J]. International Journal of Preision Engineering and Manufacturing, 2012, 13(8): 1321-1325.
[19] 周晓尧,范大鹏,张智勇. 光电伺服控制系统多回路内模控制器分析与设计[J]. 红外与激光工程,2011,40(10):2020-2027.Zhou Xiaoyao, Fan Dapeng, Zhang Wenbo. Analysis and design of multi-loop IMC controler for electro-optical serve control systems [J].Infrared and Laser Engineering, 2011,40(10): 2020-2027. (in Chinese with English abstract)
[20] 高翌阳,齐蓉. 舰载天线稳定平台伺服控制器研究[J]. 计算机测量与控制,2012,20(5):1301-1302.Gao Yiyang, Qi Rong. Design of servo controller for shipborne antenna stabilized platform[J]. Computer Measurement & Control,2012, 20(5): 1301-1302. (in Chinese with English abstract)
[21] 胡大军. 基于模糊控制的舰载光电跟踪伺服控制系统设计[D]. 武汉:武汉工程大学,2012.Hu Dajun. Design of Servo System to Shipborne Optical-Electronic Tracking Based on Fuzzy Control[D]. Wuhan: Wuhan Institute of Technology, 2012. (in Chinese with English abstract)
[22] 房立丰,刘安心,杨廷立,等. 一平移二转动并联稳定平台拓补结构设计[J]. 农业机械学报,2012,43(2):205-210.Fang Lifeng, Liu Anxin, Yang Tingli. Topology structure design of 1T-2R parallel stable platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(2):205-210. (in Chinese with English abstract)
[23] 孙波. 船用稳定跟踪平台关键技术研究[D]. 哈尔滨:哈尔滨工程大学,2010.Sun Bo. Research of key technology of stabilized and automatic tracking platform of ship[D]. Harbin: Harbin Engineering University,2010. (in Chinese with English abstract)
[24] 肖飞. 基于随机海浪理论的海上浮动平台运动分析[J]. 信息技术,2013,31(8):134-136.Xiao Fei. Motion analysis of offshore floating platform based random wave theory[J]. Information Technology, 2013, 31(8):134-136. (in Chinese with English abstract)
[25] 杨依光. 摄像稳定平台研究[D]. 哈尔滨:哈尔滨工程大学,2008.Yang Yiguang. Research to the Stabilized Platform of the Camera[D]. Harbin: Harbin Engineering University, 2008. (in Chinese with English abstract)
[26] 李猛. 两轴船载稳定平台控制系统设计与研究[D]. 哈尔滨:哈尔滨工业程大学,2015.Li Meng. Design and research control system for two-axi shipborne stabilized platform[D]. Harbin:Harbin Institute of Technology, 2015. (in Chinese with English abstract)
[27] 张洪亮. 船载稳定平台控制系统设计与研究[D]. 南京:南京航空航天大学,2010.Zhang Hongliang. Design and research control system for the shipborne stabilized platform[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2010. (in Chinese with English abstract)
[28] 郭菲. 电液驱动3-UPS/S并联稳定平台机构优化及动力学模型研究[D]. 秦皇岛:燕山大学,2016.Guo Fei. Research on Dynamic Model and Optimization of Electrohydraulic 3-UPS/S Parallel Stabilized Platform[D]. Qinhuangdao:Yanshan University, 2016. (in Chinese with English abstract)
[29] 王立玲. 并串联光电稳定平台伺服控制系统研究[D]. 保定:河北大学,2014.Wang Liling. Research on Servo Control System of Parallelserial Opto-electronic Stable Platform[D]. Baoding: Hebei University, 2014. (in Chinese with English abstract)
猜你喜欢
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
作文小学高年级(2022年3期)2022-04-20
幼儿园(2021年12期)2021-11-06
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
电子制作(2017年7期)2017-06-05
火控雷达技术(2016年2期)2016-02-06
