
基于动态面的微型扑翼飞行器纵向控制
2018-01-18 00:31:40董维中王志东
自动化与仪表 2017年12期
董维中,崔 龙,王志东,2
(1.中国科学院大学 中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016;2.日本千叶工业大学 先进机器人系,千叶 日本)
微型扑翼飞行器模仿昆虫飞行,通过左右翅翼的高频扑动产生推力、升力。国内外研究结果表明[1-2],在小尺寸飞行器中,扑翼飞行的效率明显高于固定翼、旋翼方式。扑翼飞行器可以灵活地悬停、倒飞、侧飞等,其令人瞩目的操纵性使得微型扑翼飞行器具有令人振奋的军事、民用研究前景。
文献[3-4]的实验结果表明,扑翼飞行器的气动力产生机制总结为延迟失速、旋转环量、尾迹捕获等,这些结论已经形成经验公式。国外一些著名的项目组已经开展并得到了重要的研究成果。其中,斯坦福大学MFI项目和哈佛大学的Wood项目组等接近完成了实用扑翼飞行器的开发研究。
扑翼飞行器涉及了多学科交叉研究,包括微型机械设计、新型材料、流体力学、控制、电子、通信等学科和工程领域。在此,介绍扑翼飞行器总体设计,给出飞行器气动力的计算;建立飞行器纵向模型,设计纵向控制器;针对悬停状态进行仿真验证。
1 微型扑翼飞行器
1.1 飞行器的总体设计
给出了一种微型扑翼飞行器的总体设计[5-6],如图1所示,飞行器主要由碳纤维机体、传动机构、X型翼、微型电机、机载电路板等组成。

图1 微型仿昆虫扑翼飞行器Fig.1 Miniature insect like flapping wing aircraft
必须指出的是,从工程角度来看,X型翅翼拥有较高的效率并且制造难度最低,它只在上下方向单自由度地扑动。另外,由于翅翼所采用的高性能薄膜具有很高的柔性,从而使它能够轻易地被流场改变形状而产生推力。
机体采用碳纤维减轻了机体质量,连接部件采用柔性铰链,如图2所示。
不同于其他项目组采用人工肌肉的驱动方式,该飞行器仍然采用微型直流电机,电机安装在飞行器机体质心。这种方式与荷兰的DELFLY2飞行器相同。所采用的无刷直流电机内部结构如图3所示。
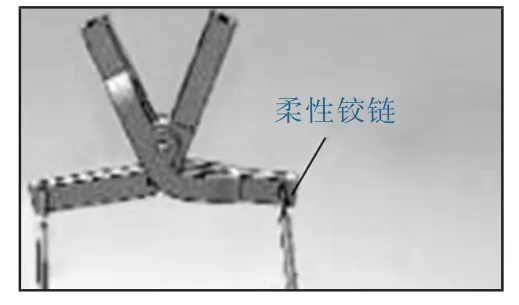
图2 柔性铰链Fig.2 Flexure hinge

图3 电机的内部结构Fig.3 Internal structure of motor
通过扩大机翼面积,提升了飞行器升力,从而具备一定程度的负载能力,其最重要的负载是机载电路板。该板安装在机体上,只为完成人工遥控操作。其主要功能是与地面遥控器进行通信,从而控制微型电机。机载电路板的核心是一块51单片机,它作为中央处理器负责通信信息解码,并对微型电机进行控制。
需要指出的是,遥控飞行的目的是对总体设计进行室内飞行验证。
遥控飞行的操作过程如下:地面人员操作遥控器的摇杆,摇杆的偏转信息经过遥控器的芯片编码后无线发送至机载电路板;信号经过电路板的天线,输出给耦合共振芯片,然后经过数字转换,再送入单片机;单片机随之完成对地面摇杆信息的解算,之后形成电机指令送至功率芯片,最后变为电流信号控制电机转速,由此保证飞机按照地面操作员的指令进行机动。机载电路板实物如图4所示。

图4 机载电路板实物Fig.4 Airborne circuit board material
所用机载电路板由中国科学院数学与系统研究院研制,其金属部分为电路板的接收电线,能够在50 m的半径之内操纵飞行器飞行。
1.2 飞行器的气动力计算
要建立飞行器数学模型,需先计算飞行器周围流场作用在翅翼上的气动力,这是扑翼飞行器研究非常重要的难点之一。气动力计算公式[6]如下:

经过数值分析,给出准稳态气动力计算归一化处理结果为
式中:A,f分别为翅翼的扑动角幅值和扑动频率。通过改变A,f来影响气动力的变化。在此,控制目标就是控制归一化数值模型中的扑动角幅值A和频率f,以直接操纵飞行器。
2 飞行器的纵向数学模型
在此,纵向模型的前提是不涉及纵向控制中的高度通道,也不针对横滚、偏航等方向,只针对纵向控制中最重要的俯仰角控制;相对于机体,翅翼的质量忽略不计。
采用Newton-Euler原理建立动力学方程,根据动量矩定理,有

式中:L,M,N分别为飞行器在滚转、偏航、俯仰方向所受到的力矩;p,q,r为滚转、偏航、俯仰方向的转动速率。 式(7)、式(8)均不涉及纵向控制,故不给予考虑。
根据俯仰角定义

式(10)的直观解释是:俯仰角在一定时间内的偏转就是俯仰角速率。
另外,根据飞行控制理论,式(9)中滚转、偏航的转动速率p和q在俯仰控制时变化缓慢,因而可以忽略。
最后,给出纵向控制模型,它仅描述控制力矩和飞行器俯仰角速率之间的映射关系,即

3 飞行器纵向稳定控制
传统PID控制方法对于复杂非线性系统来说,控制效果较差,在此引入动态面控制方法。为了提高控制效果,把俯仰角控制分为内回路的俯仰角速率控制和外回路的俯仰角控制。
以下验证在悬停模态下,飞行器在纵向方向的稳定问题。控制变量为扑动频率f和扑动角幅值A,而控制的目标是飞行器在x方向上的位置、z方向上的位置和俯仰角输出。在此仅详述俯仰角控制律设计过程。在完成俯仰角控制器后,只对时间积分就能得到纵向平面的位置控制器,故不再赘述。需要说明,纵向位置控制也直接依赖于扑动角幅值A和频率f。
首先给出已定义的俯仰角模型式(11)。
步骤 1定义 eϑ=ϑ-ϑd,则有

步骤2定义1个滑动面

步骤3定义1个Lyapunov函数

对式(14)求导,得

步骤4定义

针对r,设计估计值为

为了解决使用反演法而产生的问题,引入一阶滤波器,即

式中:αϑ(0)=r¯(0);τϑ为滤波常数。 故可得

一阶滤波器的选择是为了便于实现,定义滤波误差为
假设外部扰动力矩变化缓慢,构造1个联合Lyapunov函数

对其求导,得


针对式(22),设计控制器为

把式(23)代入式(22),得到


根据Young不等式,得到

最后得到

由式(26)可知,系统在动态面控制器的作用下,能够在有限的时间内收敛到1个小区域内,因此控制策略是有效的。
对于扑动角幅值和扑动频率控制律的设计,由于

式中:N为俯仰力矩,由气动力Fx,Fz乘以作用力臂得到。而气动力Fx,Fz直接由扑动角幅值A和频率f决定,因此控制律如式(23)所示,通过这种直接控制方法可以完成对俯仰通道的控制。
4 半物理仿真实验
[7]的仿真实验过程,模拟在悬停状态下的纵向位置和俯仰角镇定。
设定平衡点为(0,0),为飞行器输入设定跟踪值 xd=0 m,zd=0 m,q=4°。
仿真实验结果即飞行器纵向位置输出数据,如图5所示。

图5 飞行器纵向x,z位置输出Fig.5 Aircraft longitudinal x,z position outputs
由图可见,飞行器能够在有限的时间内迅速收敛,其位置输出稳态收敛在0点附近。根据计算,系统输出误差最高为0.4%,达到控制要求。
纵向仿真第3个输出量为俯仰角,其数据如图6所示。

图6 飞行器俯仰角输出Fig.6 Aircraft pitch angle output
由图可见,系统在悬停状态下,机体俯仰角围绕机体轴,会呈现一定的摆动,摆动的偏差最高达到0.3%,基本满足要求。
半物理实验同时进行了高速摄影位置拍摄。在拍摄过程中,飞行器姿态无明显变化,基本保持稳定,如图7所示。这说明在飞行器总体设计合理,具有较高的静稳定性。
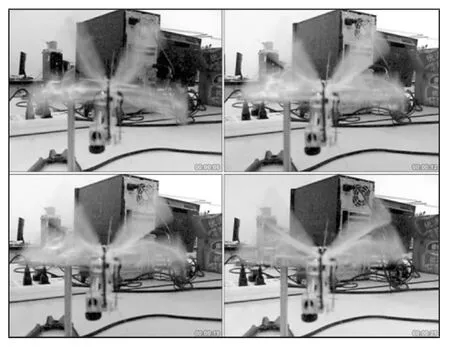
图7 飞行器姿态基本保持稳定Fig.7 Aircraft attitude remains stable basically
5 结语
所完成的总体设计在室内测试中基本达到对飞行时间的要求,说明其总体设计方案中的X型翼能够提供足够的升力,满足加载机载电路板的要求;采用经验公式计算飞行器的气动力,实现了较高的逼近精度;在纵向俯仰角和位置控制的仿真试验中,所研制的基于动态面控制律是有效的,在位置和俯仰角输出上表现出较高的稳定性和较小的控制误差。关于扑翼飞行器纵向控制的研究成果为下一步开展全自主飞行打下了基础。
参考文献:
[1]袁昌盛,李永泽,谭健.微扑翼飞行器控制系统相关技术研究进展[J].计算机测量与控制,2011,19(7):1527-1529.
[2]Ramamurti R,Sandberg W C.A three dimensional computational study of the aerodynamic mechanisms of insect flight[J].Journal of Experimental Biology,2002,60(18):110–118.
[3]Weis-Fogh T.Quick estimates of flight fitness in hovering animals including novel mechanisms for lift production[J].J Exp Biol,1973,59(1):169-230.
[4]Ellington C P.The aerodynamics of hovering insect flight IV:Aero-dynamic Mechanisms[J].Phil Trans R Sco Land,1984,305(1122):145-185.
[5]Orlowski C,Girard A,SHYY W.Four wing flapping wing micro air vehicles[C]//Proceedings of the 2010 AIAA Guidance,Navigation and Control Conference.AIAA,2012.
[6]Gordon J,Berman Z,WANG JANE.Energy-minimizing kinematics in hovering insect flight[J].J Fluid Mech,2012,582:153-168.
[7]杜亚娟.半实物仿真综合实验台控制系统方案[J].计算机工程,2010,36(22):233-235.
猜你喜欢
机床与液压(2022年6期)2022-09-16 13:04:54
北京航空航天大学学报(2020年3期)2021-01-14 00:36:50
装备制造技术(2019年12期)2019-12-25 03:06:30
成都信息工程大学学报(2019年6期)2019-08-13 03:31:00
兵器装备工程学报(2019年1期)2019-02-25 10:03:02
上海公路(2018年1期)2018-06-26 08:37:26
空气动力学学报(2018年1期)2018-03-09 07:19:03
北京航空航天大学学报(2017年11期)2017-04-23 08:30:21
重型机械(2016年1期)2016-03-01 03:42:04
中国铁道科学(2014年1期)2014-06-21 06:34:16
