面向对象影像分类与提取法在农作物遥感解译中的应用研究
2018-01-12 09:27:21魏本赞田言亮卢辉雄牛海威董双发张建永
河北遥感 2017年4期
魏本赞 田言亮 卢辉雄,3 牛海威 董双发 张建永,3
(1.核工业航测遥感中心,石家庄 050002;2.中国地质科学院水文地质环境地质研究所,石家庄050061;3.东华理工大学地球科学学院,南昌 330013)
一、前言
遥感技术作为地球信息科学的前沿技术,可以在短期内连续获取大范围的地面信息,实现农业信息的快速收集和定量分析,反应迅速,经济,客观性强,是目前最为有效的对地观测技术和信息获取手段。国内外学者对遥感影像信息提取开展了大量的工作,我国早在1979年陈述彭先生就开始倡导遥感估产[1],LENNGTON等首先利用陆地卫星数据的混合像元分解进行了作物种植面积提取的试验[2],徐希孺等利用混合像元的因子分析方法用NOAA/AVHRR数据讲行了河南省冬小专播种而积的估算,提取的结果与TM影像的提取结果趋势一致,具有较好的相关性[3],N A QUARMBY等1992年采用混合像元线性分解方法用NOAA/AV HRR数据进行了农作物种植面积的估算,达到了89%的精度[4]。传统的基于像元的信息提取方法(如监督分类与非监督分类),主要利用影像的光谱特征进行,但随着技术发展,越来越多的研究工作围绕着面向对象的分类方法进行。
基于面向对象思想的影像分析方法,分割是基础,分割尺度的选择又是其中一个关键性问题;其次,为了提高信息提取的可靠性与准确性,对尺度选择进行定量化己经成为面向对象的遥感影像信息提取的一个亟待解决的问题。本文利用eCognition软件,以面向对象遥感影像分类为主线,通过对影像分割参数的定量实验,分析各个分割参数在影像对象生成中所起的作用,论证最佳影像分割尺度,采用全局精度、混淆矩阵及Kappa系数对信息提取结果进行评价,以期对实现大面积农作物遥感信息准确提取和快速更新。
二、试验区概况及遥感影像特征
2.1 试验区概况
本文以河北省衡水市饶阳县某地区作为影像分类与信息提取的试验区。饶阳县属于暖温带亚湿润季风气候,共有林地面积23.8万亩,森林覆盖率达30%;有耕地58万亩,有效灌溉面积38万亩。试验区处于我国主要粮食基地黄淮海平原上,农作物种类较多,完全可以满足本次试验的需要。
2.2 遥感数据特征
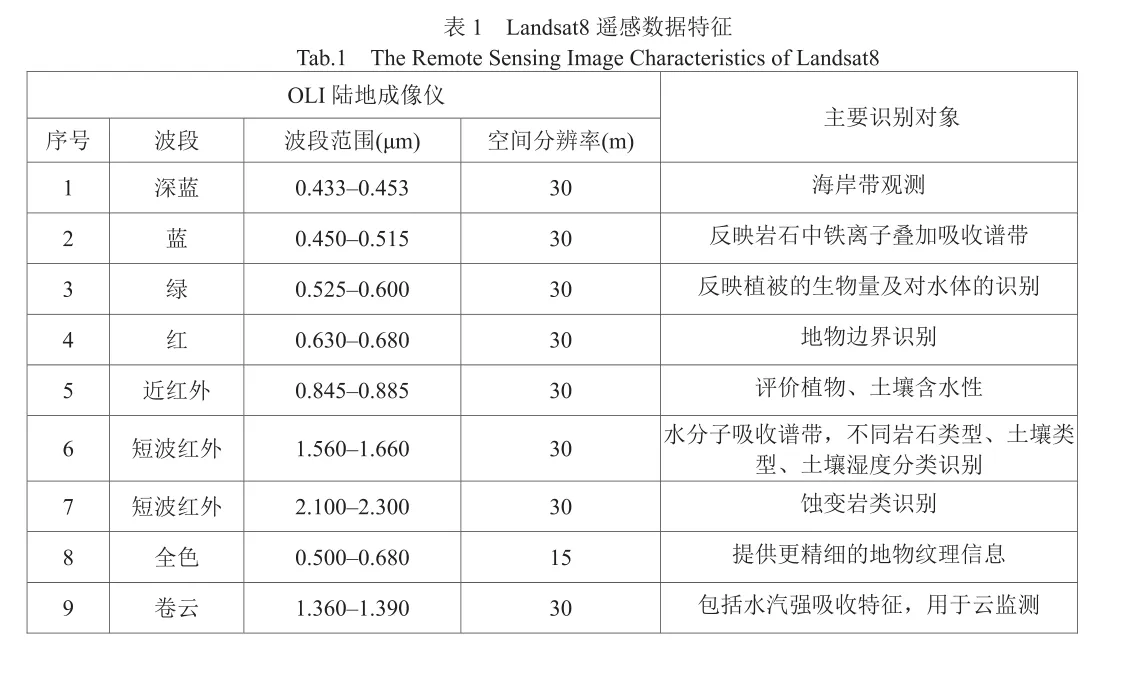
本次主要选择Landsat8数据作为遥感数据源,该数据从中国对地观测中心免费获取。Landsat8上携带有两个主要载荷:OLI和TIRS,Landsat8 OLI数据主要为可见光到短波红外波段,TIRS为热红外波段,本次研究工作主要使用Landsat8 OLI数据。其具有如下特征:
OLI陆地成像仪包括9个波段(表1),空间分辨率为30m,其中包括一个15m的全色波段,成像宽幅为185×185km。
?
?
2.3 数据预处理
遥感数据预处理,旨在改正或补偿成像过程中的辐射失真、几何畸变、各种噪声以及高频信息的损失等,为进一步做各类增强或分类处理等提供高质量的图像数据。试验区所选用的遥感数据,均进行了图像预处理,主要包括大气校正、几何校正、图像配准、图像镶嵌等处理。
三、研究方法
3.1 面向对象的多尺度图像分割
首先进行多尺度分割,多尺度影像分割可以理解为一个局部优化过程。影像分割的参数主要有分割尺度、光谱因子、形状因子等[5-6]。其中,分割尺度决定了分割对象的大小,不同的地物类别需要在不同尺度上分割;光谱因子决定了均质性由图像层的光谱值所决定的百分比;光滑度和紧凑度同属于形状因子,光滑度因子是通过光滑边界来优化图像对象的,而紧凑度因子是通过聚集度来优化图像对象。异质性则是由对象的形状和光谱差异决定的,形状的异质性则是由其光滑度和紧凑度来衡量。
分割时应遵循两个原则:一是尽可能设置较大的光谱因子权值;二是对于边界不很光滑,但聚集度较高的影像可能使用形状因子[7-8]。在满足必要的精细条件下,尽量以最大的分割尺度获取影像对象。影像分割参数,无既定的规则可行,需要通过试验获得[9]。Landsat8数据空间分辨率15m,本文经过多次试验结果,光谱因子取值0.8,形状因子0.2,光滑度0.7,紧凑度0.3,影像分割效果好(图1)。
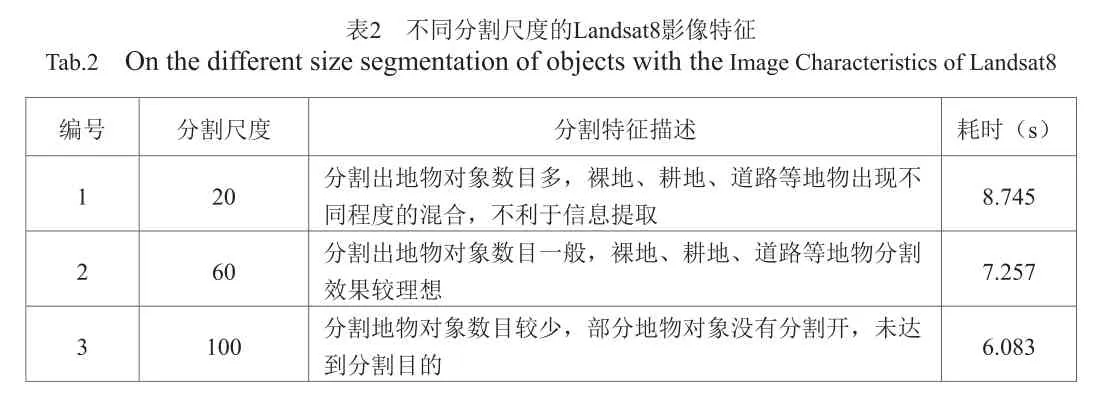
本次试验主要选择3个分割尺度:20、60、100对试验区的Landsat8影像进行分割,分别得到3个分割结果(图1~图3)。通过对比分析(表2),在尺度60上,裸地、耕地、道路等地物能够较好地区分开,同时由较少的对象表示。
3.2 信息提取
3.2.1 植被指数分析
植被在红波段、近红外波段的反射值具有较大差异,通常对红波段、近红外波段进行数学预算来设计植被指数,突出植被信息。本次信息提取主要运用归一化植被指数NDVI。

式(1)中,NIR表示近红外波段,R表示红外波段。NDVI取值范围(-1,1),负值表示地面覆盖云、水、雪等,对可见光高反射;0表示有岩石或裸土等,NIR和R近似相等;正值表示植被覆盖,NDVI越大表示植被覆盖度越大。
3.2.2 隶属度函数分类
试验区Landsat8数据时相为7月份,本次信息提取采用隶属度函数分类法对植被与非植被进行分类。
隶属度函数(成员函数)是一个模糊表达式,通过将影像对象的仟意特征值转换为0~1之间的数值,表示该对象属于某类地物的可能性,值越大,则该对象属于此类的可能性就越大。本次植被与非植被信息提取中隶属度函数设置分别如图4、图5所示。
运用S函数和反S函数,根据NDVI值,提取植被信息。在Landsat8影像中,对象的NDVI值越大,则属于植被的可能性就越大,当对象的NDVI值达到0.01或更大,则该对象确认为植被。对象的NDVI值越小,则属于非植被的可能性就越小,当对象NDVI值为0或更小时,则该对象被确定为非植被。
基于Landsat8影像植被信息提取结果如图6所示。
四、精度评价
4.1 精度评价指标
全局精度(QA)是所有准确分类中所占的比例,是一个比较粗的精度衡量指标,只能给出整体的精度信息,不能给出某一具体类别的精度信息。全局精度计算公式如下:
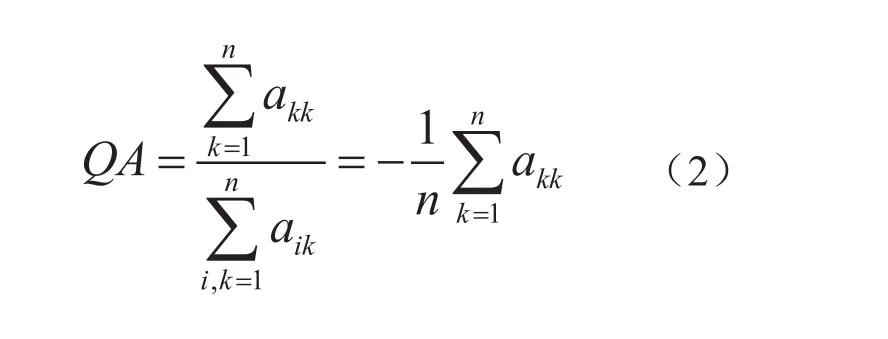
式(2)中,n为所涉及的像素总数,QA为混淆矩阵对角线上的总和除以所涉及的像素总数值。
利用全局精度进行精度评价时,像素类别的小变动可能导致百分比的变化,运用这些指标的客观性依赖于采集样本及方法。许多专家学者对信息提取结果精度评价指标进行过研究与探讨,其中Kappa系数法应用非常广泛。蒲智、曹雪、葛春青、熊轶群、周春艳、莫登奎等[10-15],都采用Kappa系数对信息提取的结果进行精度评价。
kappa系数采用一种离散的多元技术,克服了像素类别小的变动可能导致百分比变化的缺点,可以更客观地评价分类质量,既考虑了对角线上被正确分类的像素,也考虑了不在对角线上的各种漏分和混分误差。Kappa分析产生的评价指标被称为Khat统计,统计公式如式(2)所示。
式(3)中,r是混淆矩阵中的总列数;xii是混淆矩阵中第i行、第i列上像素数量;xi+和x+i分别是第i行和第i列的总像素数量;N是用于精度评价的总像素数量。
4.2 精度评价
通过试验区的外接矩形,将其平均分为10行15列,则试验区内行与列的交点作为精度评价的采样点,共150个。基于Landsat8影像,通过目视解译,设定目视解译结果为已知地物类,按试验信息提取的图像中特定像元与已知分类的参考像元(图7)进行比较,用通用的遥感分类图像质量评价混淆计算全局精度及Kappa系数。
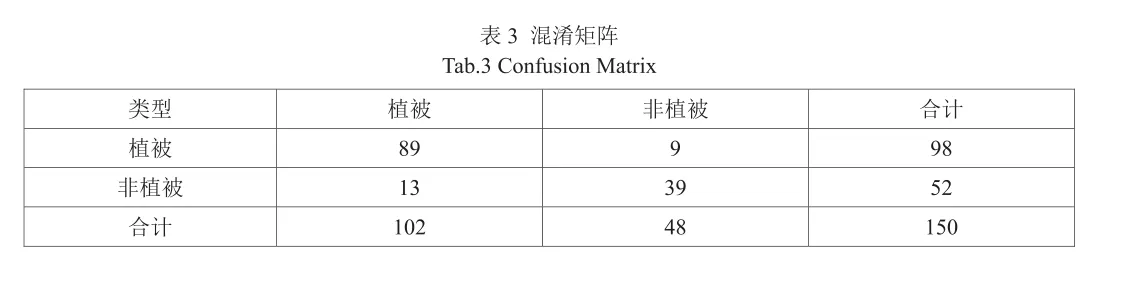
面向对象Landsat8影像植被信息提取结果的混淆举证如表3所示。
?
通过混淆矩阵计算,面向对象的Landsat8影像信息提取结果中,全局精度为85.33%,Kappa系数为0.67。根据kappa统计值与分类精度的对应关系[16],分类精度较好。
五、结语
(1)通过面向对象多尺度分割实验,确定了试验区基于Landsat8影像的分割尺度60为最优分割尺度。
(2)在最优分割尺度的基础上,采用隶属度函数分类法对植被与非植被进行信息提取,
通过精度分析评价,全局精度为85.33%,Kappa系数为0.67,分类精度较好。
(3)通过本次实验,论证了面向对象影像分类与信息提取效果较好,可以有效应用在农作物遥感快速解译与监测中。
[1]吴炳方.中国农情遥感速报系统[J].遥感学报,2004,8(6):202—205.
[2]R K LENNGTON,C T SORENSEN,R P HEYDORN.A Mixture Model Approach forEstimating Crop Areas from Land sat Data [J].Remote Sensing of Environment.1984,14:197—206.
[3]徐希孺,周莲芳,朱晓红.混合像元的因子分析方法及其在大范围冬小麦播种面积估算中的应用探讨[J].科学通报,1989,34(12):946-949.
[4]N A QUARMBY,J R G TOWNSHEND,J J SETTLE,et al.Linear mixture modeling applied to AVHRR data for crop area estimation [J].Int.J.Remote sensing,1992,13(3):415-425.
[5]阳松.面向对象的模糊分类法在土地利用调查中的应用[J].科技情报开发与经济,2007,(3):184-185
[6]Gusella L.Object-oriented Image Understanding and Postearthquake Damage Assessment for the 2003 Bam,Iran,Earthquake[J].Earthquake Spectra,2005,Sl(21):225-238.
[7]马春林.基于植被指数NDVI的遥感信息提取[J].信息科技,2009:114.
[8]Mao J,Jain A.Texture classification and segmentation using multiresolution simultaneous autoregressive models [J].Pattern Recognition,25:173-188.
[9]Woodcock C E,Strahler A H.The factor for scale in remote sensing[J].Remote Sensing of Environment,1987,21:311-332.
[10]曹雪,柯长青.基于对象级的高分辨率遥感影像分类研究[J].应用技术,2006,5(87):27-30.
[11]蒲智,刘萍,杨辽,等.面向对象技术在城市绿地信息提取中的应用[J].福建林业科技,2006,33(1):40-44.
[12]周春艳,王萍,张振勇,等.基于面向对象信息提取技术的城市用地分类[J].遥感技术与应用,2008,23(1):31-35.
[13]莫登奎,林辉,孙华,等.基于高分辨率遥感影像的土地覆盖信息提取[J].遥感技术与应用,2005,20(4):411-414.
[14]熊轶群,吴健平.面向对象的城市绿地信息提取方法研究[J].华东师范大学学报(自然科学版),2006,4:84-90.
[15]葛春青,张凌寒,杨杰.基于决策树规则的面向对象遥感影像分类[J].2009,2:86-90.
[16]Lucas,I.F.J,Frans,J.M.Accuracy assessment of satellite deriverd land-cover date:a review[J].Photogrammetric Engineering&Remote Sensing,1994,60(4):410-432.
猜你喜欢
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
商周刊(2019年19期)2019-10-17 03:23:44
今日农业(2019年10期)2019-01-04 04:28:15
电子测试(2018年15期)2018-09-26 06:01:34
现代营销(创富信息版)(2018年8期)2018-09-08 08:52:10
电测与仪表(2017年24期)2017-12-19 05:15:24
太空探索(2016年5期)2016-07-12 15:17:55
大社会(2016年6期)2016-05-04 03:42:08
现代计算机(2016年12期)2016-02-28 18:35:25
时代英语·高三(2014年5期)2014-08-26 17:01:17