
六轮独立悬挂越野车悬挂的设计与仿真
2018-01-12 05:18谭殷飞职山杰通讯作者卞庆元徐伟胜
信息记录材料 2018年3期
谭殷飞,职山杰(通讯作者),易 鑫,卞庆元,徐伟胜
(苏州大学应用技术学院 江苏 苏州 215325)
1 引言
本文是针对一种六轮越野车设计的独立悬挂。该型越野车属于电动车辆。电动车辆的系统结构与燃油车完全不同。电动汽车系统包括有机械系统、电源系统和电子控制系统。机械系统由车身、底盘、驱动装置、变速器和电池箱体组成。
本文研究的越野车是采用轮毂电机驱动的电动汽车结构,这种结构使用低速外转子电动机,电机外转子直接与车轮相连,车速完全由电机的转速控制。该车一共拥有六个独立悬挂。车身通过悬挂与轮毂电机连接,悬挂上端由减速箱提供扭矩,可使轮臂在垂直面内做旋转运动,六轮的组合使车体具备升降、俯仰、侧倾、原地旋转等功能。它的这种姿态主动调整的特性增加了越野车的野外通过性能。国外独立六轮电驱动结构较为成熟,应用度广,典型的有洛克希德马丁公司的MULE平台,美国卡内基·梅隆大学的Spinner和Crusher平台[1]。国内对于电驱式车辆也有较多研究,上海燃料电池汽车动力系统与同济大学汽车学院一同研发的四轮毂电驱动车辆春晖三号,功率较小不具有实用性[2],北京航空航天大学机器人研究所研发的全地形平台具有一定的通过性,但是扭力杆的结构只具有一定扭动程度,它被动适应的性能决定了地形通过性远远不如主动适应的独立悬挂平台。
悬挂是车辆最重要的功能之一,他连接车轮与车体。负责整车的支撑和缓冲。车辆要实现行驶、转弯、制动的功能,必须将车身和车轮连接在一起。这就要求悬挂必须适应车辆重量和装载质量的变化。车辆要对不同路况产生相应驱动力、转弯侧向力和制动力等。悬挂需要具备足够的强度和耐久性,车辆行驶的平稳性,可靠性完全由悬挂装置来决定,悬挂的设计对越野车来说具有重要作用。
2 六轮独立悬挂越野车悬挂的设计
2.1 悬挂的选择
悬挂把车身与车轮连接起来,以实现支撑、定位、限位、缓冲等功能。一般来说,悬挂系统可分为以一根轴连接的刚性车轴式悬架和左右两轮可独立的运动式悬挂。刚性车轴式悬挂结构简单,承载力大,不过束角和外倾角设计的自由度小,乘坐舒适性不好,簧下质量偏大而且两端车轮极易引起侧向振动。独立式悬挂使左右两轮分别相连于车体,因此,可以尽量减小货箱底板距地面的高度,其簧下质量小,接地性好,缺点是结构较为复杂,成本相较于刚性车轴较高。重载货车的悬挂多采用板簧式,商用车则多用拉杆式悬挂。
6X6全地形越野车属于野外高机动车辆,车重1.5t,载荷1t,采用独立悬挂。野外地形复杂,就以丛林来讲,土坡、水潭随处可见,灌木碎石充盈道路,要在这样的道路上面行驶,车辆必须有较好的通过性。为了增加车辆通过性可以增加底盘高度,扩大车宽。该6X6型越野车将传统底部悬挂侧置,大大拓宽了车体空间,组合动作可使车辆具备俯仰,摇摆,升降的额外功能,大大增加了车辆的通过性。悬挂下端与轮毂电机铰接,上端通过轴承固定于车体上并通过联轴器与减速箱相连。野外行驶中路面凹凸不平,减速箱输出扭矩转动悬挂从而越过障碍物。
2.2 基于Solidworks的独立悬挂设计
悬挂要求能主动控制并组合运动,上端由减速箱提供扭矩,下端用法兰与轮毂电机相连。一端由一对轴承固定,另一端悬置,类似于悬臂梁。所以,根部强度要足够大,而悬置端可适当减少材料,减轻重量。法兰与轮毂连接处采用圆角过渡,减缓根部应力集中现象。悬挂的主干部分设计了多处斜角,减小了应力突变,使载荷能较为均匀的分布于悬挂主体。
3 基于Solidworks的静应力仿真
3.1 有限元分析
使用simulation模块进行有限元分析,材料选用合金钢。 用实体化网格划分,如图1所示。

图1 悬挂有限元模型
3.2 边界处理
悬挂铰接在轮毂电机上,约束铰接孔的四个面。
4 悬挂有限元分析结果
4.1 悬挂应力分布
根据分析结果可知,悬挂上端伸出轴的根部应力最大,通过轴承的那一部分轴,应力最小。这是由于轴承反力作用在伸出轴上,内应力集中在轴的根部。
4.2 变形分布
图2为悬挂变形分布情况。整个形变自上而下呈现由大到小渐变式的分布。变形量最大的是伸出轴的顶端,变形量最小的在悬挂主干和法兰相接处。这是由于法兰为全约束,载荷全部分布在伸出轴段。
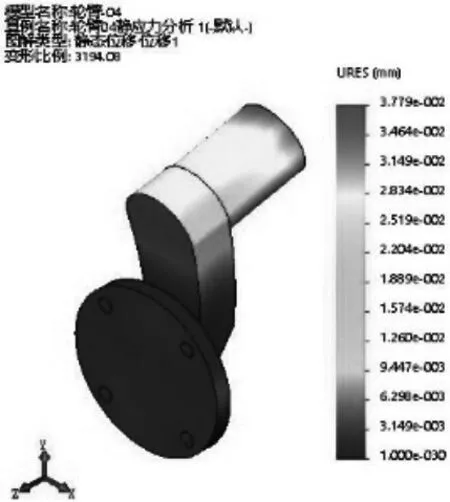
图2 悬挂受力变形分布
4.3 安全系数分布
取8倍安全系数分布作为极限冲击载荷。悬挂设计完全在安全系数以内,所以在使用过程中是安全的。
5 结语
(1)悬挂结构作为车辆最重要的承重部件,研究悬挂的应力、形变情况具有重要意义。
(2)Solidworks环境下的Simulation模块功能强大,在一定程度上反应了悬挂实际受力情况。
(3)根据有限元分析结果显示,总重2.5T的越野车满载情况下,能抗击8倍冲击,安全性能较好。
[1]张韬懿,王田苗,吴耀,等.全地形无人车的设计与实现[J].机器人,2013,6(35):657-664.
[2]曹艺辉,赵言正,付庄.无人车独立悬挂系统设计与仿真[J].机电一体化,2012:17-21.
[3]陈阳.基于有限元技术的重型汽车悬架力学分析[J].现代制造技术与装备,2016,9:68-70.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
阅读(科学探秘)(2020年3期)2020-05-29
模具制造(2019年3期)2019-06-06
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年12期)2016-02-11
越玩越野(2015年2期)2015-08-29
山东工业技术(2014年20期)2014-10-21
铁道机车车辆(2012年4期)2012-11-27
