在航集装箱船摇摆姿态的概率模型
2018-01-10 00:04王培良吴晓芳张婷
上海海事大学学报 2017年4期
关键词:集装箱船
王培良+吴晓芳+张婷


摘要:为研究在航集装箱船的摇摆姿态尤其是横摇姿态,利用假定概率模型的方法对集装箱船关键位置处的摇摆姿态进行研究,并构建摇摆概率模型,讨论并确定该模型的相关参数,从而建立集装箱船摇摆姿态的概率模型。结果表明,集装箱船不同位置处的纵摇角、横摇角和垂向加速度的概率模型近似服从高斯分布,仅其相关参数不同。该方法从在航集装箱船摇摆姿态的角度为船舶航行安全研究提供一定的理論依据。
关键词: 集装箱船; 船舶摇摆; 航行安全; 高斯分布
中图分类号: U674.131;U661.321 文献标志码: A
Abstract: In order to research the swaying attitude of container ships, especially the rolling attitude, the method that a probabilistic model is assumed is used. The swaying attitude of key positions of container ships is studied and the swaying probabilistic model is constructed. The corresponding parameters of the probabilistic model are discussed and confirmed. Based on the above, the probabilistic model of swaying attitude is established. The results show that the probabilistic models of the longitudinal swaying angle, the transverse swaying angle, and the vertical acceleration of container ships in different positions are subject approximately to Gauss distribution, but the corresponding parameters are different. This method provides theoretical basis for the ship navigation safety study from the angle of swaying attitude of container ships on the sailing.
Key words: container ship; ship swaying; navigation safety; Gaussian distribution
0 引 言
为适应现代航运发展的要求,集装箱船得到了广泛使用,并且正向高速化、大型化及多用途方向发展。然而,集装箱船航行过程中易受风浪等影响而发生剧烈摇摆,因横摇导致的船舶倾覆事件时有发生,其引起的生命、财产损失都是巨大的。[1]因此,当前对集装箱船的研究多集中于横摇运动[2-3]。文献[4]根据刚体动力学原理,研究了船舶在波浪中的6自由度非线性耦合运动方程。文献[5]对船舶的非线性耦合运动进行研究,并对比其理论值与实际值。文献[6]研究3自由度船舶运动数学模型,并对船舶运动性进行了相应的分析和数值模拟。文献[7]研究了船舶横摇、纵摇和垂荡这3个自由度的影响,从而提出1.5自由度的船舶横摇运动方程。多自由度模型能更为精确地反映船舶的运动姿态,但其对短时域内的计算分析比较困难,而3自由度的摇摆概率模型也能准确反映船舶的摇摆姿态,且可计算性较好。因此,本文从纵摇、横摇、垂荡这3个自由度的摇摆概率的角度对在航集装箱船关键位置处(如船首、船中等)的摇摆进行数学建模,并确定其摇摆概率模型。
1 理论与方法
本文所研究的在航集装箱船的某位置处的摇摆姿态可看作随机变量,包括纵摇角、横摇角和垂向加速度,其在航行过程中的采样值分别记为集合Z={xz1,…,xzi,…,xzn},H={xh1,…,xhi,…,xhn},A={xa1,…,xai,…,xan},其中n表示采样点数量。
1.1 模型假定
正态分布又名高斯分布,是一个在数学、物理及工程等领域中均有重要应用的概率分布,自然界中很多随机现象都近似服从该分布。相关研究[8-9]表明,海浪波面起伏、波浪中船体的弯曲应力等服从正态分布。鉴于此,本文研究的在航集装箱船不同位置处的摇摆角度(包括纵摇角、横摇角和垂向加速度)近似服从不同参数的正态分布[10]。
1.2 模型验证
首先假定在航集装箱船的摇摆角度近似服从正态分布。为验证本假定的可信度,需要对样本观测数据的总体分布进行初步推断。
统计学中的Q-Q图是一个概率图,可用于检验样本数据是否服从指定分布,是样本分位数与指定分布分位数的关系曲线图,因此它可以用图形的方式比较两个样本的概率分布。如果两个样本的概率分布相似,则Q-Q图几乎落在直线y=x上。本文首先用Q-Q图对从船首、船中两个观测点处采集到的数据进行分析,初步判断两个观测点处的数据是否服从相同的概率分布;若两个观测点处的数据服从相同的分布,则可用直方图分析其中一处的数据,判定其是否服从正态分布[11]。
直方图在非参数统计领域,尤其是在密度估计及数据分析领域具有重要的作用。用直方图分析样本数据的分布可以初步估计数据的总体分布,从而为研究总体的概率密度提供重要的依据。本研究中用MATLAB中的HIST函数根据采集的数据初步判定纵摇角、横摇角和垂向加速度的概率密度函数[12]。endprint
在“育锋”号实习船正常航行过程中,角度传感器采集V1和V2处的纵摇角、横摇角、垂向加速度,采集时间共3 h。在此时间段内,传感器总共触发47次,每次触发后每个传感器可以连续采集并返回100个角度和加速度的样本值,因此每个测试点均有4 700个随机采样值。图2和3分别为触发后摇摆角度和加速度的平均值序列[15]。
2.2 试验结果及分析
2.2.1 分布一致性判定
首先使用Q-Q图判定V1和V2处各方向上的摇摆角度和加速度是否服从相同的分布,结果见图4。
由图4可初步推断,V1和V2处纵摇角、横摇角和垂向加速度均服从相同的分布。后续只对V1处进行概率模型判定,V2处概率模型判定方式和参数估计方式与V1处相同。
2.2.2 概率模型判定
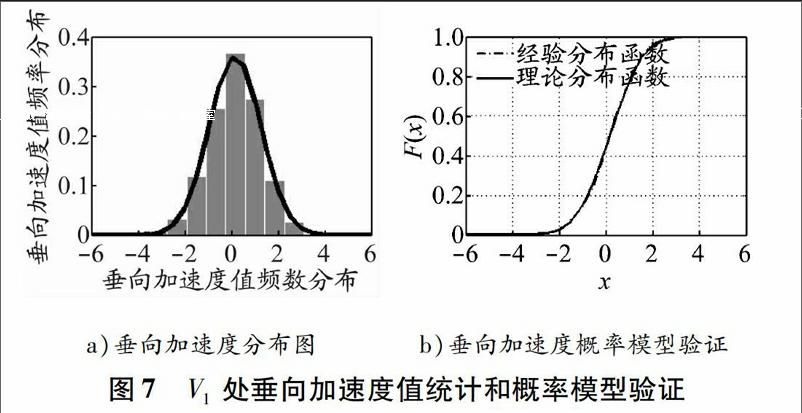
为验证概率模型,首先利用直方图对“育锋”号船上V1和V2处采集的纵摇角、横摇角和垂向加速度变化值进行初步统计分析和概率验证,然后采用经验分布函数对其概率模型进行进一步精确判定,结果见图5~7。
分析图5a)可知,在航集装箱船船首处(V1处)纵摇角值近似服从正态分布;图5中经验分布函数图与以样本均值和样本标准差为参数的正态分布图的契合度较高,进一步说明纵摇角值服从正态分布。分析图6和7可得,在航集装箱船船首处的横摇角值和垂向加速度值均服从正态分布。
速度概率模型结果,用最大似然估计法确定其相应的高斯模型的参数(主要是总体均值和总体标准差),见表1。
分析表1可知,在航集装箱船船首和船中处的横摇角的波动幅度均较大,而纵摇角和垂向加速度值的波动相对较小。与船中处的横摇角相比,船首处的横摇角小得多,说明船舶在航行过程中受横风、横浪影响较大(与“育锋”号船航行过程中的监控视频所得结果一致)。
3 结 论
探索一种新型的在航集装箱船不同位置处的摇摆状态的概率模型,包括纵摇角、横摇角和垂向加速度的概率模型。研究发现,集装箱船在安全航行过程中关键位置处的摇摆角度和加速度模型均服从不同参数的正态分布。本次研究从集装箱船摇摆姿态的角度为船舶结构安全和航行安全的研究提供了一定的理论依据。
致谢 感谢上海海事大学金永兴教授为本次研究提供试验数据及对本文提出创建性的修订建议。
参考文献:
[1] 高儒. 集装箱船综合安全评估(FSA)研究[D]. 大连: 大连海事大学, 2013.
[2] 李浩, 陆建辉. 规则纵浪中船舶参数激励横摇运动研究[J]. 船舶, 2011, 22(1): 16-20.
[3] 蘇作靖, 张显库. “育鲲”轮参数横摇的数值模拟及分析[J]. 哈尔滨工程大学学报, 2012, 33(5): 590-594.
[4] 袁远, 成志军, 金咸定. 船舶在波浪中运动的六自由度非线性耦合方程[J]. 上海交通大学学报, 2001, 35(4): 541-543.
[5] NEVES M A S, RODRGUEZ C A. Influence of non-linearities on the limits of stability of ships rolling in head seas[J]. Ocean Engineering, 2007, 34(11/12): 1618-1630.
[6] e SILVA S R, SANTOS T A, SOARES C G. Parametrically excited roll in regular and irregular head seas[C]//International Shipbuilding Progress, 2005, 52(1): 29-56.
[7] BULIAN G, FRANCESCUTTO A. On the nonlinear modeling of parametric rolling in regular and irregular waves[C]//International Shipbuilding Progress, 2004, 51(2): 173-203.
[8] 万培峰. 砰击和波浪诱导响应的组合方法及考虑维修的船体可靠性分析[D]. 武汉: 武汉理工大学, 2001.
[9] 胡雄, 孙德建, 金永兴, 等. 集装箱船结构状态的在线监测技术研究[J]. 中国工程机械学报, 2009, 7(4): 85-88.
[10] 金永兴, 张世斌. 集装箱船体波浪载荷应力短期分布的统计分析[J]. 上海交通大学学报, 2012, 46(8): 1243-1247.
[11] 赵嶷飞, 王晨, 王红勇. 基于ADS-B的航迹误差分布规律研究[J]. 中国民航大学学报, 2012, 30(6): 48-52.
[12] 冯卫国, 武爱文. 概率论与数理统计[M]. 上海: 上海交通大学出版社, 2013: 156-180.
[13] 金永兴, 胡雄, 施朝健. 集装箱船结构状态监测与评估系统[J]. 上海海事大学学报, 2008, 29(3): 1-4.
[14] 金永兴, 伍生春. 船舶结构与设备[M]. 北京: 人民交通出版社, 2012: 50-120.
[15] 王倪传, 石玉虎, 覃闻铭. 船舶结构不同应力点的应力概率模型[J]. 上海海事大学学报, 2015, 36(4): 61-67. DOI: 10.13340/j.jsmu.2015.04.013.
(编辑 贾裙平)endprint
猜你喜欢
集装箱化(2016年9期)2016-10-12
集装箱化(2016年6期)2016-07-11
集装箱化(2016年5期)2016-06-15
集装箱化(2016年3期)2016-04-27
集装箱化(2016年2期)2016-03-10
集装箱化(2014年12期)2015-01-06
集装箱化(2014年11期)2014-12-17
集装箱化(2014年9期)2014-10-17
集装箱化(2014年8期)2014-09-17
集装箱化(2014年7期)2014-08-14