一种基于电磁导航的餐饮服务机器人的设计
2018-01-08 08:31:06安阳工学院电子信息与电气工程学院赵红停郭秩华张天鹏李正斌
电子世界 2017年24期
安阳工学院电子信息与电气工程学院 赵红停 郭秩华 张天鹏 李正斌
0 引言
随着社会经济的发展和科学技术的进步,服务机器人作为机器人家族中的一员,在家庭服务、餐饮服务、医疗、康复训练、教育娱乐等领域应用日益广泛。在《国家中长期科学和技术发展规划纲要(2006-2020年)》中,明确指出将服务机器人作为未来优先发展的战略高技术,并提出“以服务机器人应用需求为重点,研究设计方法、制造工艺、智能控制和应用系统集成等共性基础技术”。餐饮服务机器人作为智能化餐厅的服务员,具有自动寻迹、自动避障、语音交互、点餐、送餐等功能,在智能化餐厅领域具有较高的应用价值[1-2]。
1 总体结构设计
电磁导航餐饮服务机器人的总体结构采用模块化设计思想,将整个系统分为微处理器模块、电磁导航模块、红外避障模块、餐位识别模块、运动控制模块、人机交互模块和电源模块等[3],其总体结构如图1所示。

图1 电磁导航餐饮服务机器人的总体结构
微处理器模块以32位微处理器STM 32F103RCT6为核心,STM-32F103RCT6的最高工作频率为72 MHz,内部集成64KB的RAM、256 KB的FLASH ROM、16通道12位ADC、2通道12位DAC、3个16位通用定时器、16路PWM输出,支持I2C、SPI、USART等多种通信接口[4],在系统中主要起数据采集与处理、参数设置、通信控制等作用。磁导航模块主要由霍尔传感器和信号调理电路组成,其作用是采集磁条的磁场强度,并实现磁导航功能。红外避障模块主要由红外避障传感器构成,用以现实餐饮服务机器人导航时的自动避障功能。餐位识别模块主要由RFID识别器构成,用以检测餐桌的位置,并判断餐饮服务机器人在导航中的位置。运动控制模块主要由直流无刷电机、行星减速器、无刷电机驱动器等构成,为服务机器人移动提供控制信号和驱动力。人机交互模块包括语音处理电路、触摸屏显示电路、射频通信电路等,用以完成餐饮服务机器人与消费者之间的信息交换。电源模块主要由锂电池和稳压电路构成,用以为餐饮服务机器人控制电路提供合适的工作电压。
2 主要硬件电路设计
2.1 电磁导航模块设计
电磁导航餐饮服务机器人通过在预先设定的行驶轨迹上铺设磁条,使行驶轨迹出现一个稳定的磁场,利用电磁导航传感器检测地面磁条的磁场强弱,根据磁场强度来判断行驶路径偏离中心的程度,形成一个偏差信号,并利用该偏差信号控制餐饮服务机器人的移动方向,通过实时闭环控制和周期性扫描方式能够准确地纠正偏离量,使餐饮服务机器人能够稳定的沿设定行使轨迹运动,实现电磁导航功能。
在设计电路时,采用磁条配合霍尔传感器的方式作为餐饮服务机器人的电磁导航方式,这种导航方式具有导航精度高,运行稳定,更换路线方便、维护简单等特点。设计所采用的磁条的宽度为50 mm,磁场性质为N型,是剩磁场强度为540 Gs,可以提供稳定、集中、均衡的磁场,使霍尔传感器可以很清晰的捕捉磁条位置。霍尔传感器利用电磁的霍尔效应,当电流垂直于外加磁场通过导体时,载流子发生偏转,在垂直于电流和磁场的方向上会产生附加电场,从而使导体的两端产生电势差。设计时采用16路霍尔传感器(SS495A)检测磁场信号[5],霍尔传感器把检测到的磁场信号转换成电压信号输出,并通过电压比较器LM 339与参考电压比较,当霍尔传感器的输出电压大于参考电压时,电压比较器LM 339输出为高电平,表示有磁场通过霍尔传感器。两个相邻霍尔传感器的间距为8 mm,传感器自身长度3 mm,整个电磁导航传感器模块的长度为168 mm。霍尔传感器的接口电路如图2所示,整个电磁导航传感器模块设计如图3所示。
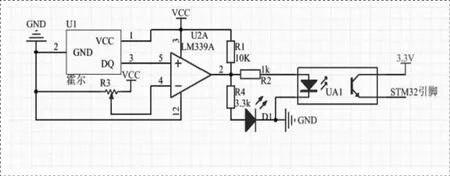
图2 霍尔传感器接口电路图

图3 电磁导航传感器模块
2.2 红外壁障模块设计
红外避障模块利用红外避障传感器E18-D80NK实现[6]。红外避障传感器是利用物体对红外光反射的物理特性而设计的。在没有障碍物遮挡的情况下,红外避障传感器发出的红外光会随着传播距离的增加而不断衰减;如果红外光在传播过程中遇到障碍物,红外光将会被反射回避障传感器的接收器上。红外避障传感器依据接收器上是否收到返回的红外光,来判断在红外避障传感器可检测范围内是否存在障碍物。红外避障传感器感应到前方30 cm处有障碍物时会向微控制器模块发送“避障”信号,微控制器模块向运动控制模块发出“停止”命令,餐饮服务机器人停止前进。当障碍物移除后,红外避障传感器向微控制器模块发送“清障”信号,微控制器模块向运动控制模块发出“启动”命令,餐饮服务机器人向前运动。
2.3 餐位识别模块设计
餐位识别模块利用射频识别技术(RFID)实现[7],主要由RFID卡片和RFID识别器构成。RFID卡片存有餐位的位置信息,并埋在预设运动轨迹的岔路口。RFID识别器安装在餐饮服务机器人的底盘上,当餐饮服务机器人走到岔路口时,RFID识别器自动获取RFID卡片信息,并将信息发送至微处理器模块进行处理,由微处理器模块判断餐饮服务机器人所在的位置,进而决策餐饮服务机器人的行进路线。
2.4 人机交互模块设计
人机交互模块主要由语音处理电路、触摸屏显示电路和射频通信电路构成。语音处理电路主要由AR9331语音芯片和Mega328微机控制芯片组成,语音处理电路内部存储餐厅常用语句以及一部分报警信号语音,用以完成服务用语交流、餐点信息播报、语音报警等服务功能。触摸屏显示电路由7寸液晶串口触摸屏构成,餐饮服务机器人通过显示屏向顾客显示精美的餐点图片,然后通过USART将顾客的点餐信息传送给微控制器模块。射频通信电路由无线收发器芯片NRF24L01实现[8],餐饮服务机器人利用射频通信将顾客的点餐信息发送至厨房,方便厨房查看顾客的点餐信息。
2.5 运动控制模块设计
运动控制模块主要由直流无刷电机、行星减速器、无刷电机驱动器等构成,与电磁导航模块、餐位识别模块相配合,实现对餐饮服务机器人运动的精准控制。电磁导航模块中的电磁导航传感器是餐饮服务机器人的“眼睛”,它不停地检测磁条的位置并将检测结果传输到运动控制模块,运动控制模块结合餐饮服务机器人的位置信息和直流无刷电机的速度信息,向无刷电机驱动器发出控制信号,由无刷电机驱动器驱动电机带动整个餐饮服务机器人运动。直流无刷电机的控制采用速度、位置双闭环控制方式,保证了餐饮服务机器人运动控制的精确性和快速性。
3 软件设计
3.1 餐饮服务机器人主程序设计
餐饮服务机器人的主程序流程图如图4所示。餐饮服务机器人接通电源后,微处理器模块、电磁导航模块、红外避障模块、餐位识别模块、运动控制模块等进行初始化,人机交互模块显示点餐、送餐模式选择信息。当餐饮服务机器人开始服务时,微处理器模块向电磁导航模块、运动控制模块等发送运动信号,电磁导航模块实时监控磁条信息并发送到微处理器模块进行位置调整,当到达一号餐位时,餐位识别模块中的RFID识别器读取磁带上埋定的IC卡片信息,并与点餐餐位信息进行比对,如果信息比对成功,餐饮服务机器人转向一号餐位支路,如果信息比对不成功,餐饮服务机器人继续寻迹二号、三号、四号等餐位,直至信息比对成功。在点餐模式下,餐饮服务机器人向信息比对成功的餐位发出“您好,请您点餐”的语音提示,同时与顾客进行语音交流,当点餐完毕后,餐饮服务机器人将餐点信息通过射频通信电路发送到后台监控系统,并重新回到磁条主支路上进行寻迹,回到原点,等待下一次命令[9]。在送餐模式下,餐饮服务机器人向信息比对成功的餐位发出“您的餐点到了,请您用餐”的语音提示,顾客通过机械按钮确认餐点已经送达完毕,餐饮服务机器人重新回到磁条主支路上进行寻迹,回到原点,等待下一次命令。
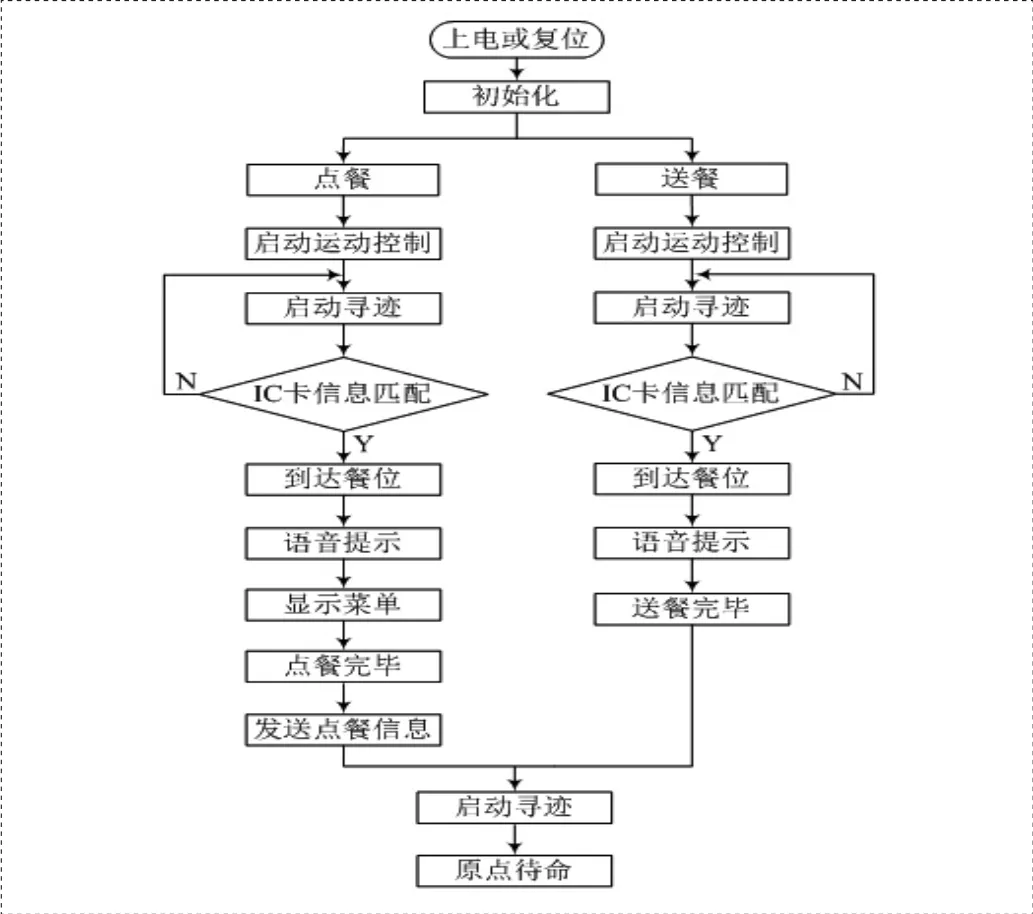
图4 主程序流程图

图5 霍尔传感器检测示意图
3.2 磁条中间位置算法
餐饮服务机器人的导航装置上均匀分布16个霍尔传感器,如图5所示。霍尔传感器检测磁条上的磁场信号,并将信号传递给电磁导航模块。在图5中,霍尔传感器检测到磁条的磁场信号,16个霍尔传感器的输出状态用二进制表示为0000001111100000。假设其中1个霍尔传感器出现故障,则有可能检测到0000001011100000、0000001110100000等信号,无法取到正常数据。为了避免此类情况,将检测到的0000001011100000、0000001110100000信号视为有效信号。为了确保个别霍尔传感器损坏时导航系统仍然能够正常工作,将霍尔传感器取到的数据从最高位向最低位逐位扫描并判断其值是否为1,扫描到1后停止扫描并记录其位置;同时从最低位向最高位扫描,遇到1后停止扫描并记录其位置。此时得到了霍尔传感器值为1的最高位和最低位,将最高位和最低位取平均值,得到的值就是16个霍尔传感器检测到的磁条中间位置。
4 外观设计
餐饮服务机器人采用人型结构,身体高度为1600 mm,从底端起两个10 N直流无刷电机装载在木质控制底盘上。从底盘往上780 mm设计斜度为78.6度梯台外形,再以中心轴为参考,距底盘400 mm处设置两个间距180 mm的两个红外避障传感器,呈八字形安装,能够探测机器人整个前方区域。距离底板200 mm处内设隔层于机身后侧200×300 mm的活动部件,目的是为了能够方便对机器人内部线路的检修。距台体上段线放置高20 mm、宽400 mm、长300 mm的餐盘,考虑到餐盘的稳定性,嵌入机身100 mm,餐点位置即为距底盘800 mm处,能够满足90%以上高档餐厅餐桌高度要求。人机交互模块放置在距餐盘上100 mm处,设计60度斜度,能够使顾客轻松交互。距离液晶上边线50 mm处,中心轴线上安装语音播放器,前方不会有更多障碍物,使得语音清晰悦耳。头部长200 mm、宽150 mm,类似人体椭圆头型,给人以亲切感。整个机身用3D打印技术制作而成,机身细腻光滑,美观大方,餐饮服务机器人的外观设计图如图6所示。

图6 餐饮服务机器人的外观设计
5 结论
所设计的餐饮服务机器人结合微控制器STM 32F103的强大功能,利用SPI、USART、I2C等通信协议,使用2.4G射频通信的优质传输功能,具有外观大方,电路结构简单,机械性能可靠,系统工作实时性好等特点,可广泛应用于智能餐厅服务系统,为消费者提供迎宾、点餐、送餐等服务。
[1]周陆洲.餐厅服务机器人的应用分析[J].科技风,2015(15):122-123.
[2]赵博,段承杰,李震,等.餐饮服务机器人的研制[J].安阳工学院学报,2017,16(2):20-23.
[3]廖栏椿,陈燚,张俊.餐饮服务机器人的研究与实现[J].科技风,2013(8):53-54.
[4]李多,叶桦.基于STM 32与FPC1011F的嵌入式指纹采集存储仪设计[J].电子器件,2015(2):362-367.
[5]陈杰,陈荡,熊雄.C8051单片机与霍尔传感器系统设计[J].武汉工程大学学报,2012,34(7):61-65.
[6]王康,李杨民.一种轮式移动机器人的运动控制及自主避障的实现[J].天津理工大学学报,2017,33(2):12-17.
[7]于清晓,吴珂科,袁灿,等.RFID技术在一种餐厅服务机器人定位中的应用[J].东华大学学报(自然科学版),2012,38(4):460-464.
[8]张天鹏,李正斌,刘彦珍.基于无线通信的温室环境监控系统设计[J].中国农机化学报,2015,36(1):124-127.
猜你喜欢
中国生物医学工程学报(2019年4期)2019-07-16 08:04:16
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:46
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04 02:24:44
爆笑show(2015年8期)2015-09-22 01:37:29
太空探索(2015年6期)2015-07-12 12:48:42
河南科技(2014年16期)2014-02-27 14:13:21
河南科技(2014年8期)2014-02-27 14:07:41
世界科学(2013年6期)2013-03-11 18:09:39
物理与工程(2010年2期)2010-03-25 10:01:58